
双环旋转多指平夹自适应欠驱动机器人手装置.pdf

是浩****32

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双环旋转多指平夹自适应欠驱动机器人手装置.pdf
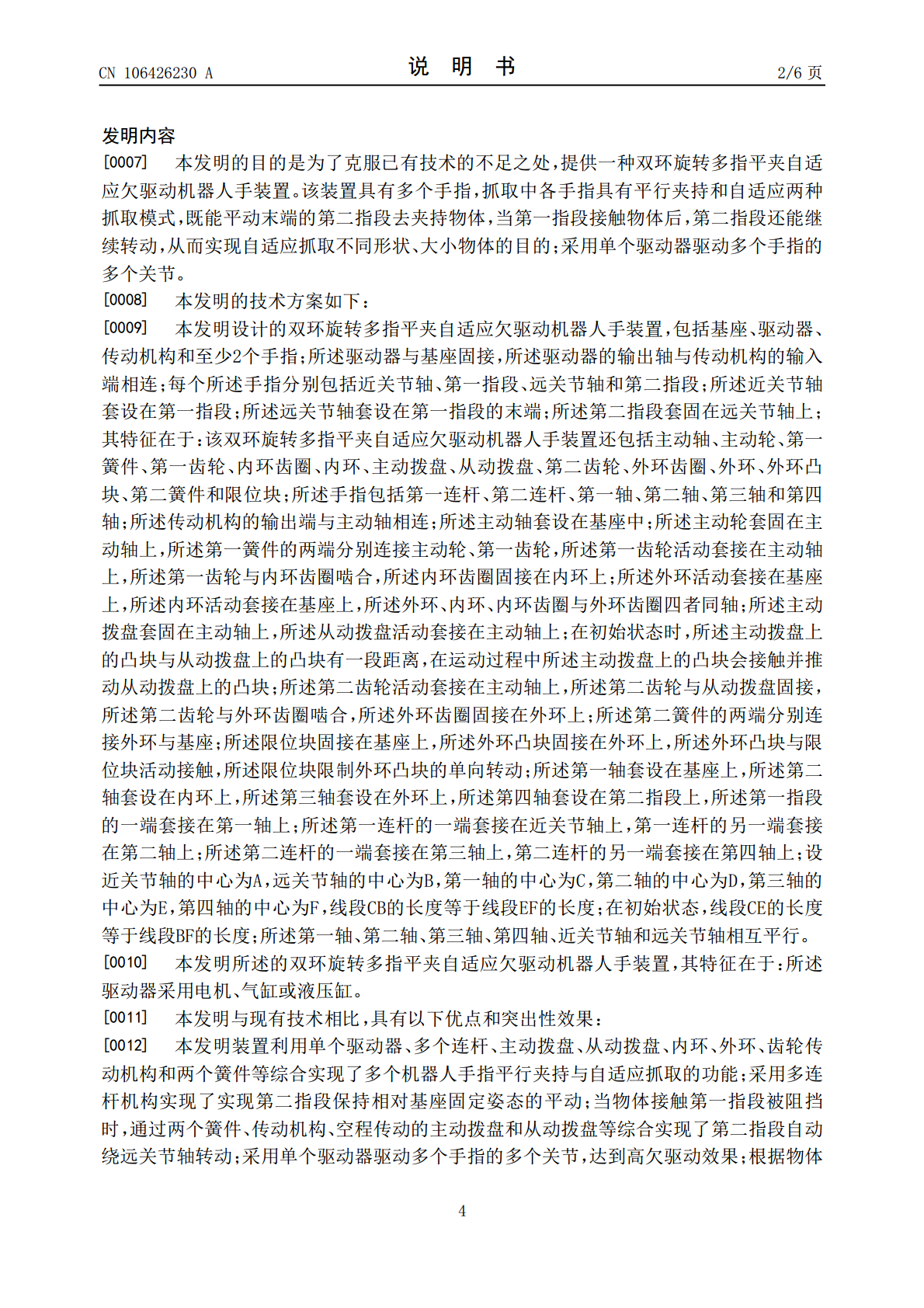
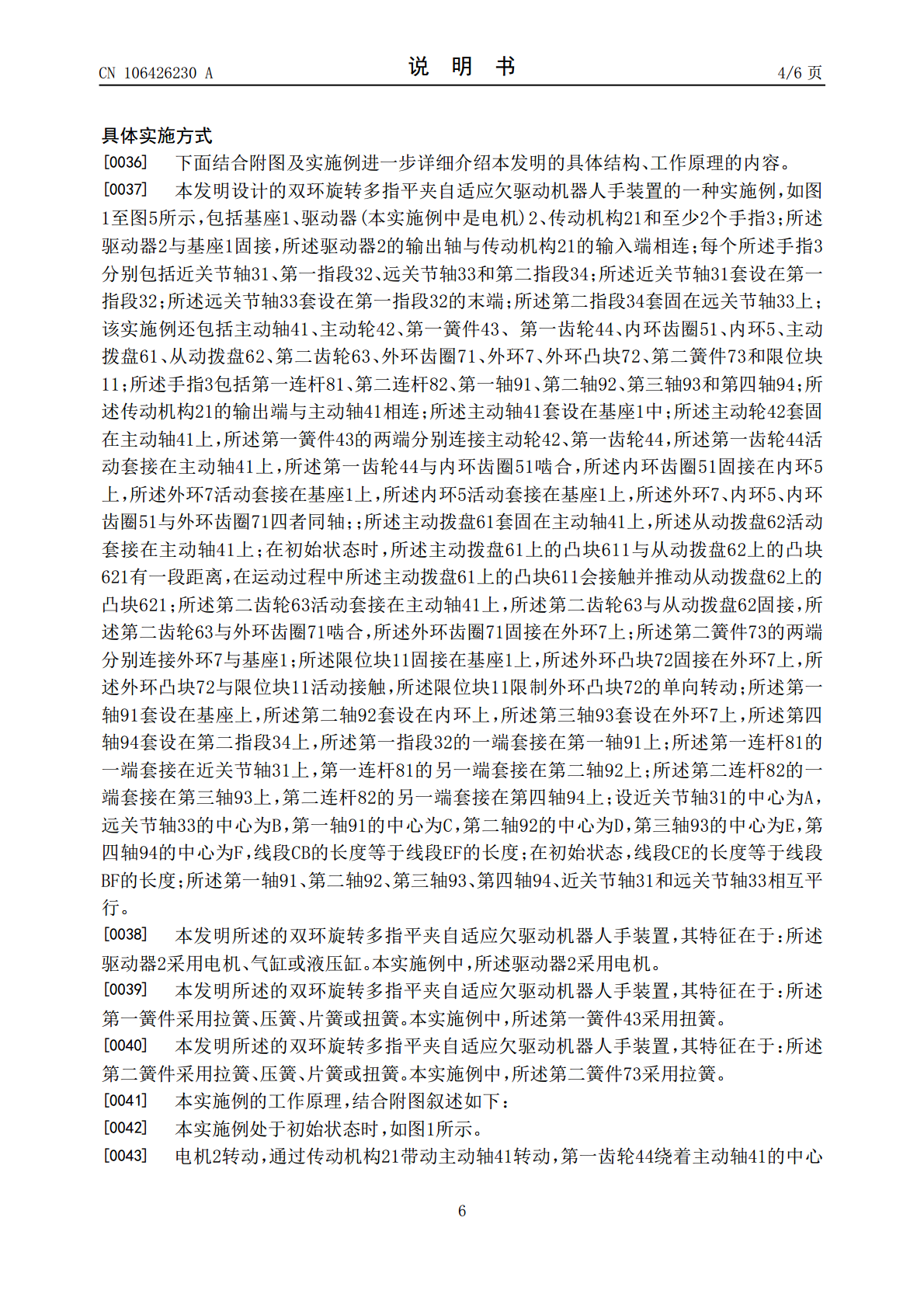
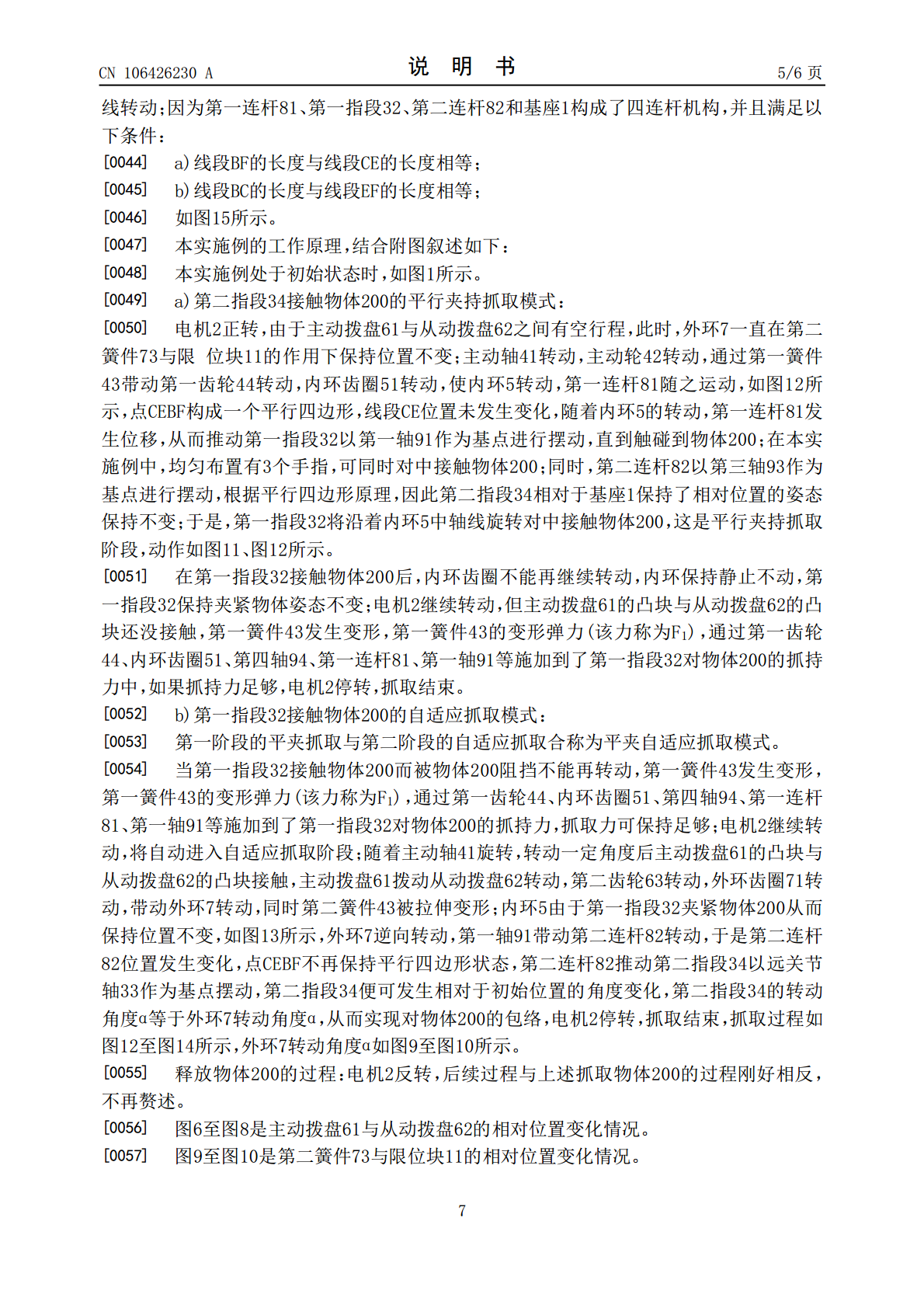
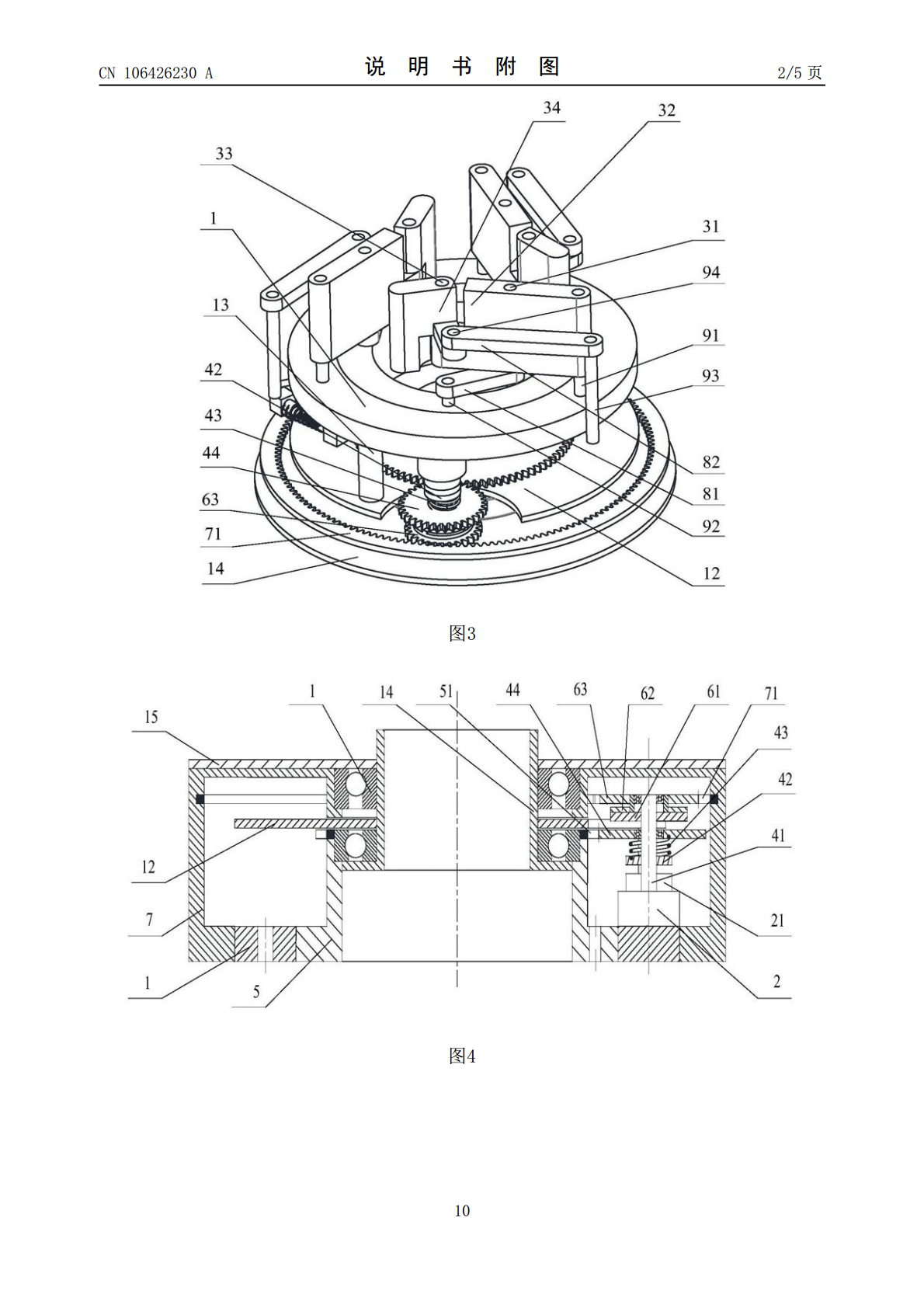
双环旋转多指平夹自适应欠驱动机器人手装置,属于机器人手技术领域,包括基座、驱动器、至少2个手指、主动轴、主动轮、两个簧件、两个齿轮、内环齿圈、内环、主动拨盘、从动拨盘、外环齿圈、外环和限位块等。该装置利用可旋转双环及连杆机构等实现了多个机器人手指平行夹持与自适应抓取的功能;采用单个驱动器驱动多个手指的多个关节;根据物体形状和位置的不同,可以在平夹与自适应两种模式之间自动切换;能够平动第二指段去夹持物体,该装置还能在第一指段接触物体之后,自动转动第二指段去接触物体,获得出力更大的握持效果,能够自动适应不同形

一种平夹自适应三指欠驱动机器人手.pdf
本发明属于机器人技术领域,尤其涉及一种平夹自适应三指欠驱动机器人手。该手具有6个自由度,由底座和3个欠驱动手指组成。3个欠驱动手指包括第一指、第二指和第三指,三指呈三角形分布安装在底座中,通过螺钉与底座固定连接在一起。3个欠驱动手指结构尺寸完全相同,均利用驱动器、齿轮传动机构、连杆机构、齿轮齿条机构传动,实现一个电机控制手指的两个关节。该手可对不同形状尺寸的物体实现平行夹持和自适应包络的复合抓取模式,结构紧凑,集成度高,制造维修成本低,抓取范围大,可用作智能机器人的末端执行器。

空程双驱动平夹耦合自适应机器人手指装置.pdf
空程双驱动平夹耦合自适应机器人手指装置,属于机器人手技术领域,包括两个指段、两个关节轴、两个电机、多个齿轮、两个拨轮、两个拨盘、三个簧件等。该装置具有平夹、耦合、自适应和钩取四种抓取模式:1)平夹抓取:在抓取过程中,该装置始终保持末端的第二指段相对于基座不变的姿态,达到第二指段平夹抓取的效果;2)耦合抓取:能做到两关节同时正向运动,抓取过程拟人,抓取快速;3)自适应抓取:如果物体先接触第一指段,该装置会自动转入自适应抓取模式,达到对不同形状、尺寸物体均适应的功能;4)钩取:可单独转动第二指段,实现钩取。该
双齿条平夹间接自适应机器人手指装置.pdf
双齿条平夹间接自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、电机、三个齿轮、两个齿条、滑块、凸块拨盘、簧件和限位凸块等。该装置综合实现了平行夹持及自适应抓取的功能,根据目标物体形状和位置的不同,既能平动第二指段捏持物体或外张撑住,也能依次转动第一指段和第二指段包络不同形状、大小的物体;该装置抓取范围大;采用欠驱动的方式,利用一个电机驱动两个关节,无需复杂的传感和控制系统;该装置结构紧凑、体积小,制造和维护成本低,适用于机器人手。
滑槽双曲柄直线平夹自适应机器人手指装置.pdf
滑槽双曲柄直线平夹自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、电机、两个骨架杆、双平行四连杆机构、直线滑槽、滚轮、两个簧件和两个限位块等。该装置实现了机器人直线平行夹持和自适应抓取的复合抓取模式。该装置能直线平动第二指段夹持物体,在平动第二指段夹持物体阶段,第二指段末端始终保持直线的运动轨迹,适合在工作台面抓取不同尺寸物体;该装置也能自适应抓取物体,在第一指段接触物体停止运动后,第二指段绕远关节轴转动,适应物体形状进行包络抓取,适合抓取不同形状、尺寸的物体;该装置利用一个电机驱动两个指