
一种具有形状自适应的三指欠驱动机械手.pdf

子安****吖吖

1/9
2/9
3/9
4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具有形状自适应的三指欠驱动机械手.pdf
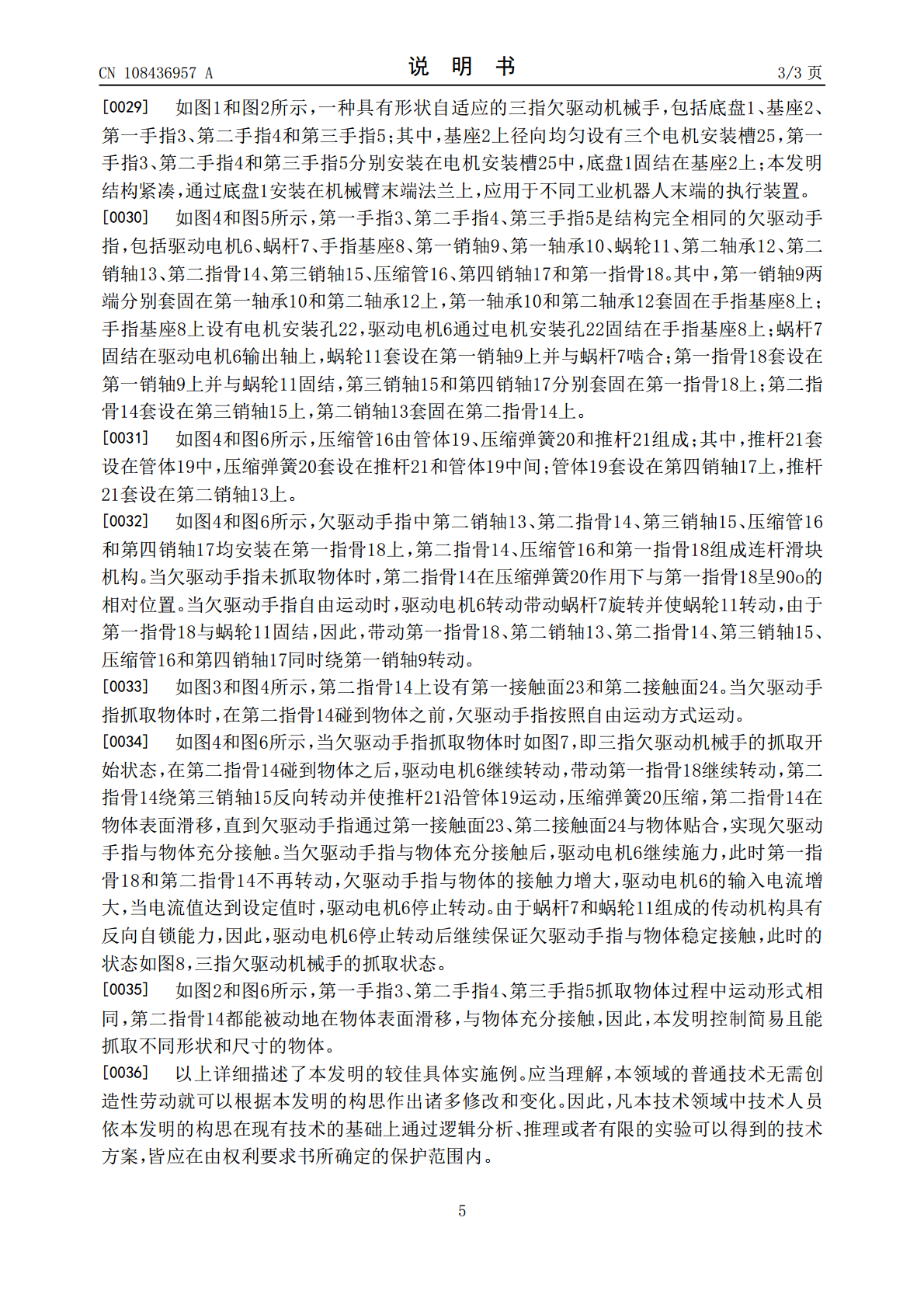
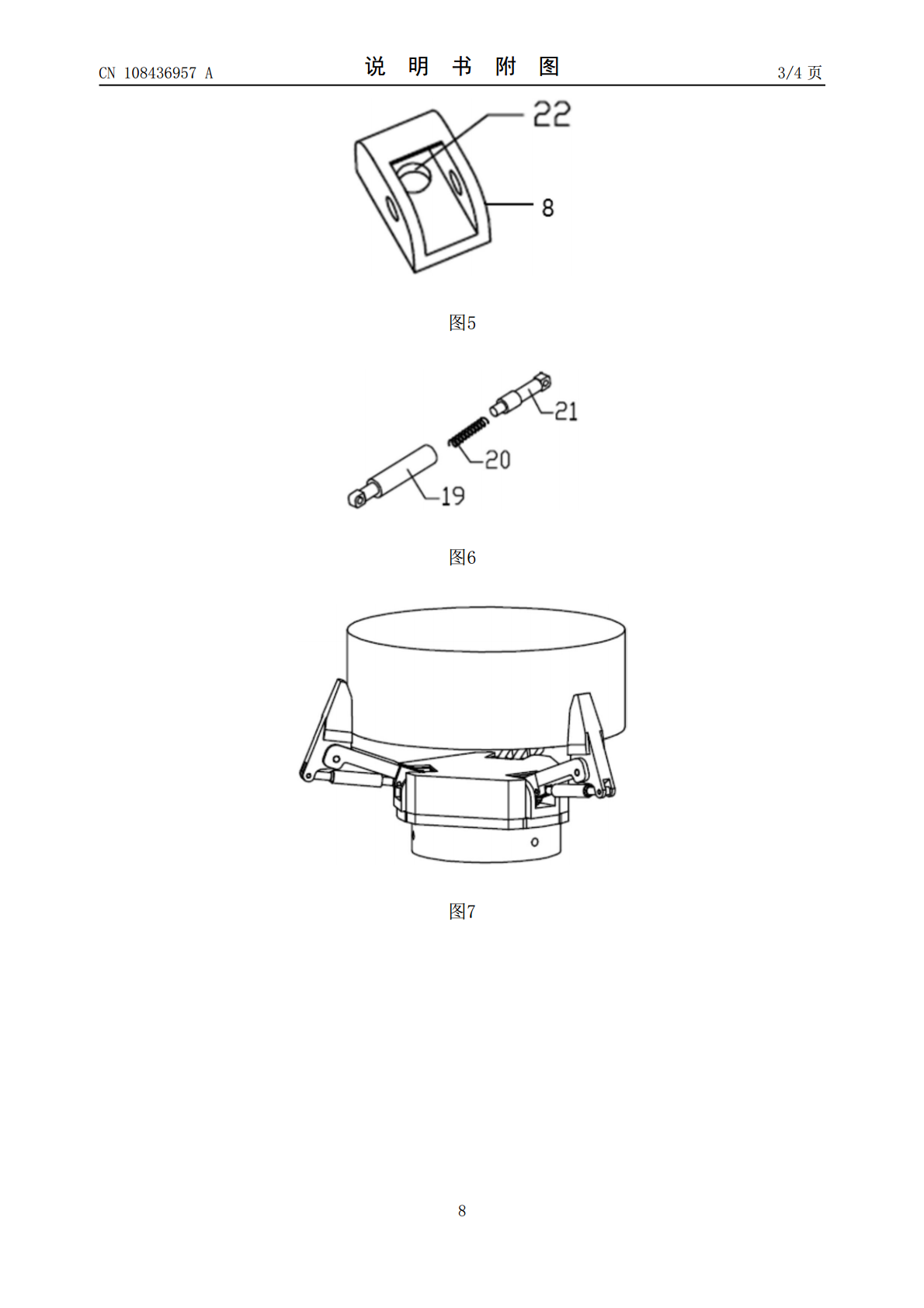
本发明公开了一种具有形状自适应的三指欠驱动机械手,涉及工业机器人领域,包括底盘、基座、第一手指、第二手指和第三手指;其中,第一手指、第二手指和第三手指是结构完全相同的欠驱动手指,包括驱动电机、蜗杆、手指基座、第一销轴、第一轴承、蜗轮、第二轴承、第二销轴、第二指骨、第三销轴、压缩管、第四销轴和第一指骨;三指欠驱动机械手采用蜗轮蜗杆传动机构。本发明是一种具有形状自适应的三指欠驱动机械手,具有结构紧凑、控制简易、自锁能力强的特点,能被动自适应物体的大小,稳定抓取不同的物体,特别适合用于工业机器人末端的执行装置。
具有欠驱动自适应机构的拟人机械手.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN101058184A(43)申请公布日2007.10.24(21)申请号CN200710041724.0(22)申请日2007.06.07(71)申请人上海交通大学地址200240上海市闵行区东川路800号(72)发明人李顺冲扬飞鸿沈晓蓓邱凯孙振邦(74)专利代理机构上海交达专利事务所代理人毛翠莹(51)Int.CIB25J15/08权利要求说明书说明书幅图(54)发明名称具有欠驱动自适应机构的拟人机械手(57)摘要本发明涉及
一种欠驱动的自适应拟人机械手.pdf
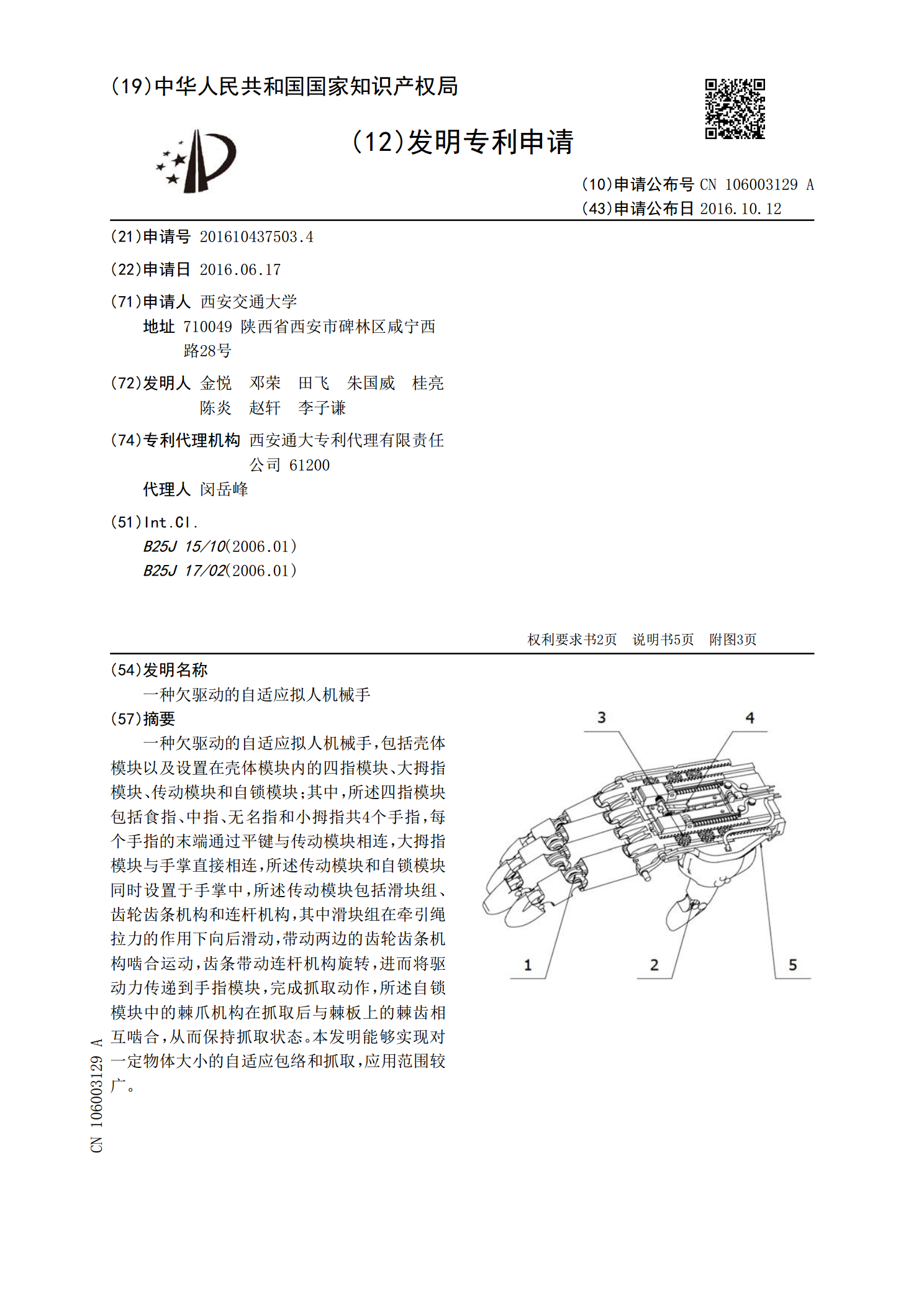
一种欠驱动的自适应拟人机械手,包括壳体模块以及设置在壳体模块内的四指模块、大拇指模块、传动模块和自锁模块;其中,所述四指模块包括食指、中指、无名指和小拇指共4个手指,每个手指的末端通过平键与传动模块相连,大拇指模块与手掌直接相连,所述传动模块和自锁模块同时设置于手掌中,所述传动模块包括滑块组、齿轮齿条机构和连杆机构,其中滑块组在牵引绳拉力的作用下向后滑动,带动两边的齿轮齿条机构啮合运动,齿条带动连杆机构旋转,进而将驱动力传递到手指模块,完成抓取动作,所述自锁模块中的棘爪机构在抓取后与棘板上的棘齿相互啮合,

具有形状自适应的履带式欠驱动机器人及传动方法.pdf
本发明涉及一种具有形状自适应的履带式欠驱动机器人及传动方法。目前使用的欠驱动机器人,一般采用的是轮式移动机构,由于轮式移动机器人形状改变功能较差,如爬坡、越障、跨壕沟等,不能够适应各种较恶劣的环境。本发明其组成包括:机体装置(1),所述的机体装置前端两侧面通过连接轴分别与2个驱动轮装置(9)连接,所述的驱动轮装置通过连接轴与履带架(8)的前端连接,所述的履带架后端通过连接轴与导向轮装置(7)连接,所述的导向轮装置通过连接轴与所述的机体装置连接,所述的驱动轮装置、所述的导向轮装置具有凹槽,所述的凹槽内安装有

一种自适应绳驱式欠驱动三指机械手.pdf
本发明为一种自适应绳驱式欠驱动三指机械手,包括手掌、手指组件、机械手腕,所述手指组件由结构相同的1个第一固定手指和2个第二转动手指组成,所述第一固定手指的底部固定在所述手掌上,所述第二转动手指与固定在所述手掌中心、并能使所述第二转动手指沿手掌中轴线水平转动的齿轮转动机构相连。本发明性能稳定可靠、结构紧凑、实用、灵活,可与工业机器人进行高效配合,提高工业生产的自动化程度。