
自适应电子差速控制方法及上位机.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自适应电子差速控制方法及上位机.pdf
本发明公开了一种自适应电子差速控制方法及上位机,本发明结合速度控制下的转矩自适应及转矩控制下的转速自适应,实现自适应差速控制。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自适应转向控制,不需要转向传感器,可节省成本。

自适应电子差速控制系统.pdf
本发明公开了一种自适应电子差速控制系统,包括整车控制器、上位机、两个逆变器以及与两个驱动轮对应的两个驱动电机,所述上位机与所述整车控制系统连接,所述上位机还通过CAN总线与所述两个逆变器连接,通过逆变器控制驱动电机的运转。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自
汽车及其电子差速控制方法和控制装置.pdf
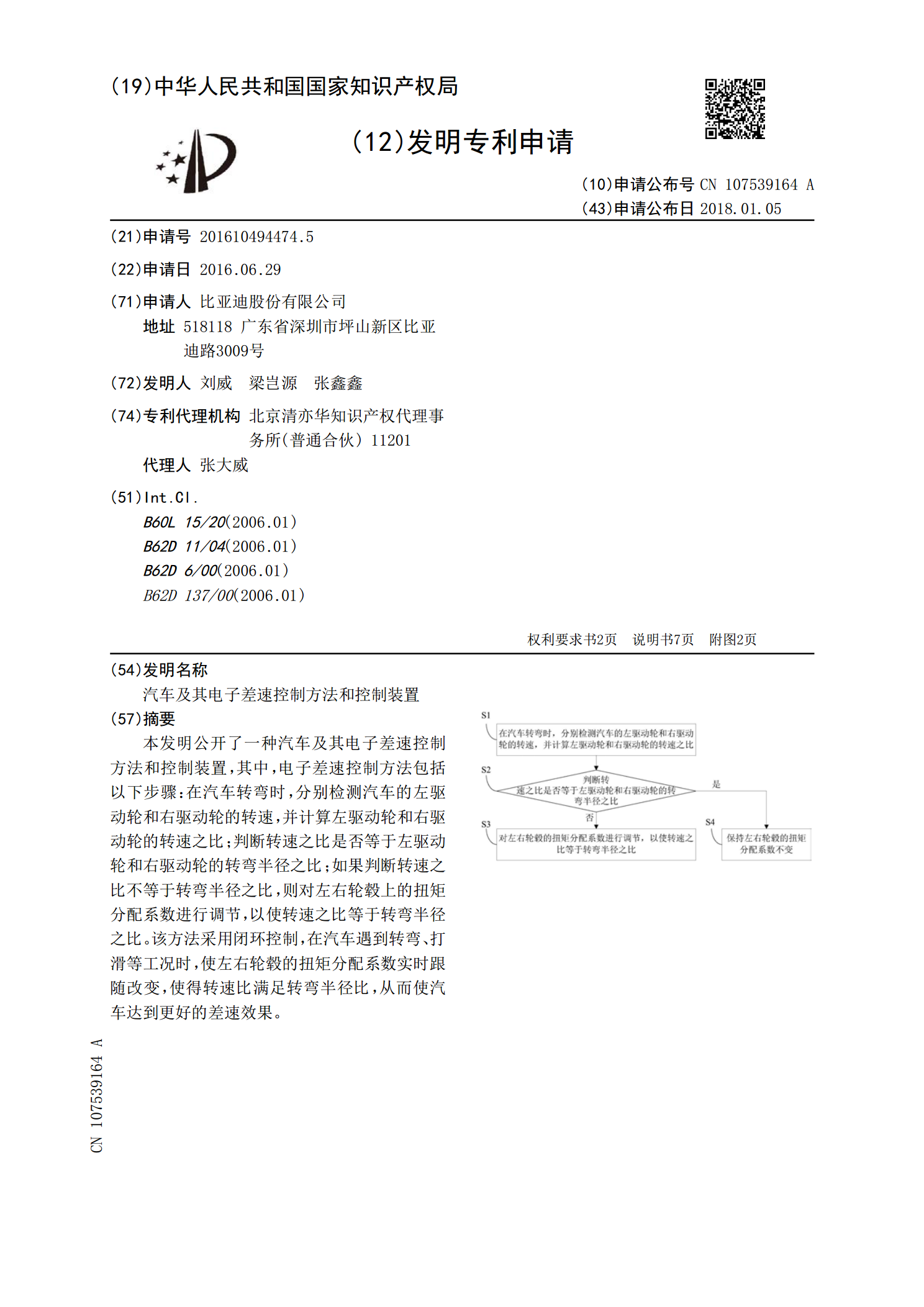
本发明公开了一种汽车及其电子差速控制方法和控制装置,其中,电子差速控制方法包括以下步骤:在汽车转弯时,分别检测汽车的左驱动轮和右驱动轮的转速,并计算左驱动轮和右驱动轮的转速之比;判断转速之比是否等于左驱动轮和右驱动轮的转弯半径之比;如果判断转速之比不等于转弯半径之比,则对左右轮毂上的扭矩分配系数进行调节,以使转速之比等于转弯半径之比。该方法采用闭环控制,在汽车遇到转弯、打滑等工况时,使左右轮毂的扭矩分配系数实时跟随改变,使得转速比满足转弯半径比,从而使汽车达到更好的差速效果。
一种电子差速控制器及控制方法.pdf
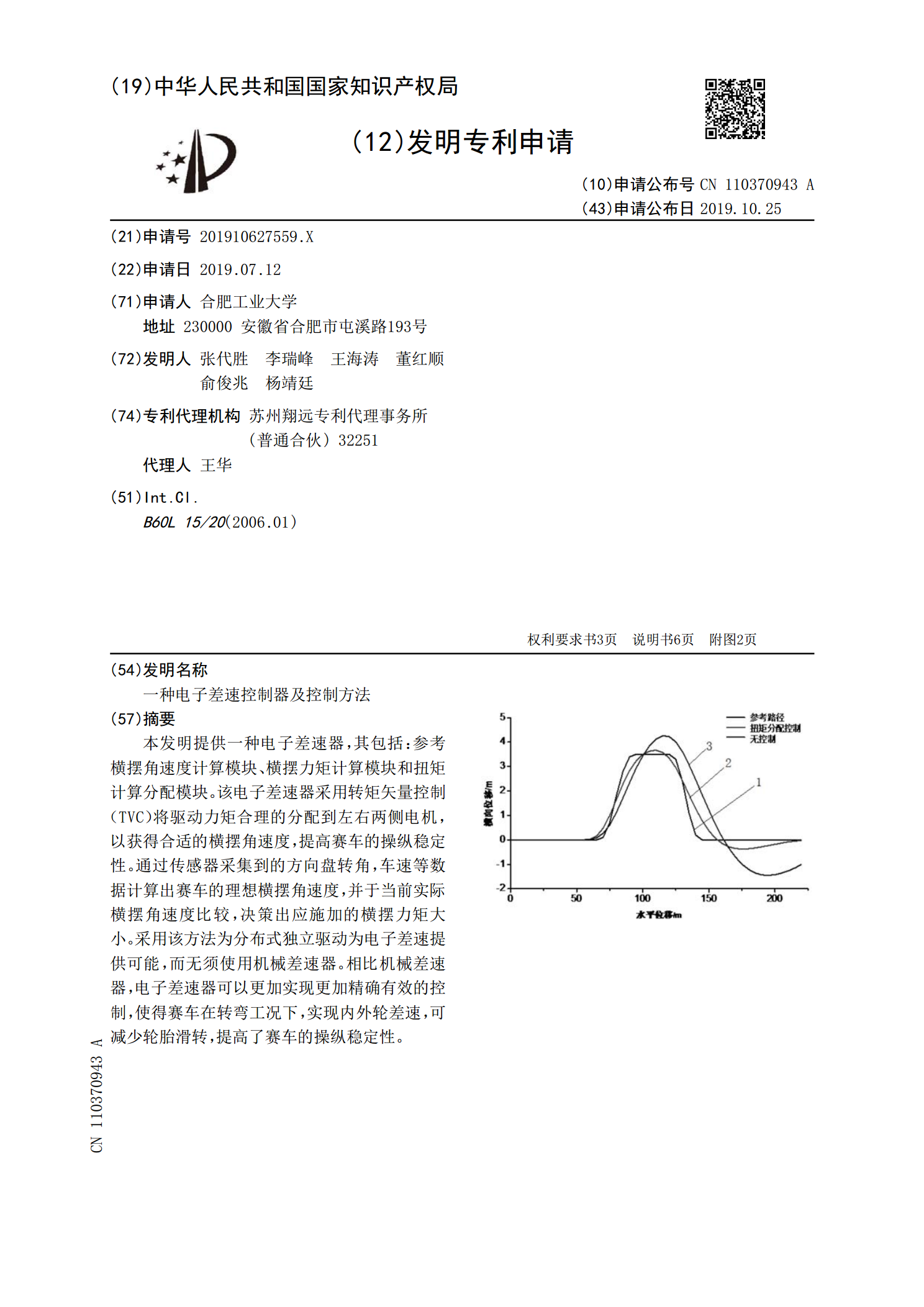
本发明提供一种电子差速器,其包括:参考横摆角速度计算模块、横摆力矩计算模块和扭矩计算分配模块。该电子差速器采用转矩矢量控制(TVC)将驱动力矩合理的分配到左右两侧电机,以获得合适的横摆角速度,提高赛车的操纵稳定性。通过传感器采集到的方向盘转角,车速等数据计算出赛车的理想横摆角速度,并于当前实际横摆角速度比较,决策出应施加的横摆力矩大小。采用该方法为分布式独立驱动为电子差速提供可能,而无须使用机械差速器。相比机械差速器,电子差速器可以更加实现更加精确有效的控制,使得赛车在转弯工况下,实现内外轮差速,可减少轮
一种自卸车后轮电子差速控制方法.pdf
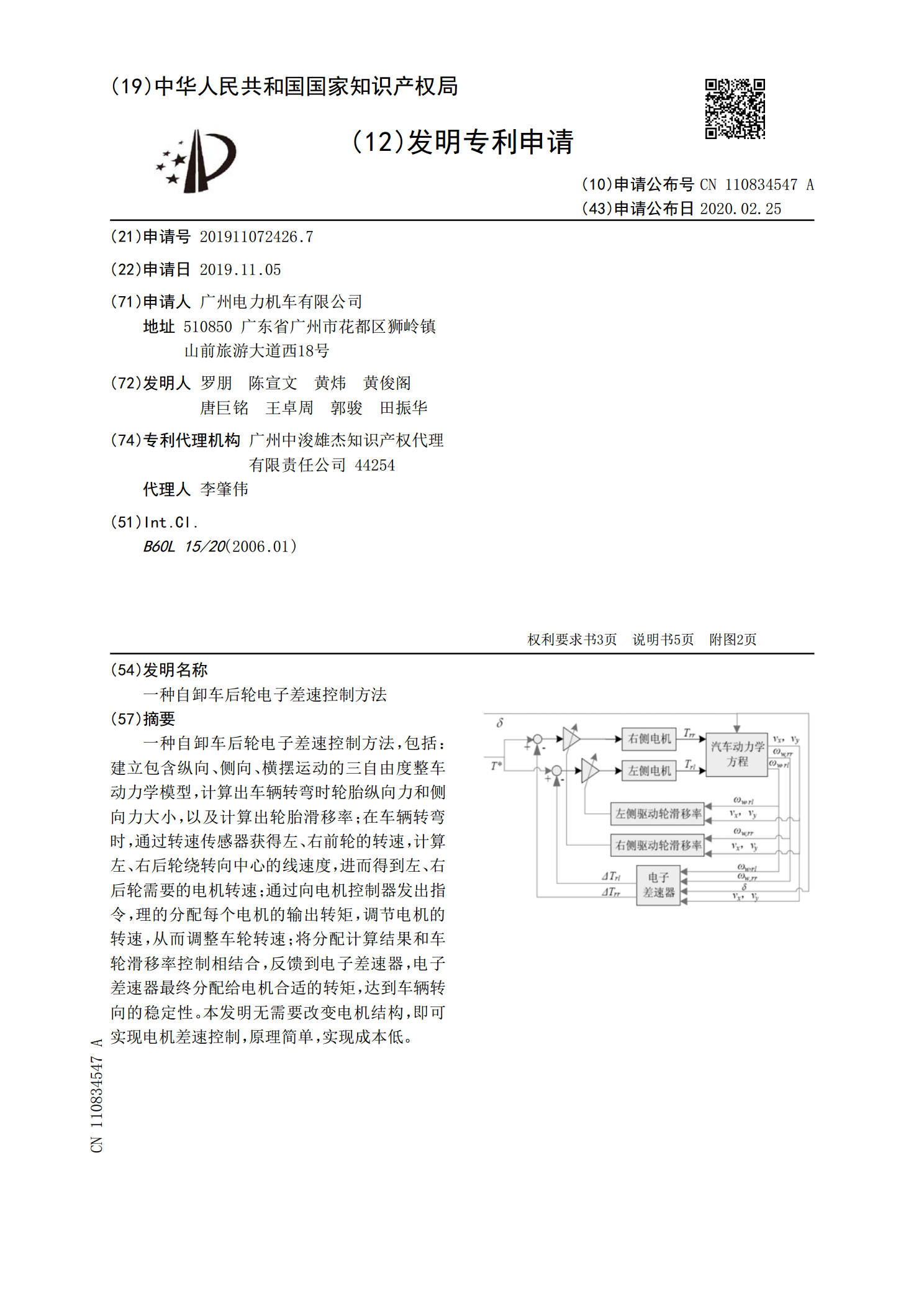
一种自卸车后轮电子差速控制方法,包括:建立包含纵向、侧向、横摆运动的三自由度整车动力学模型,计算出车辆转弯时轮胎纵向力和侧向力大小,以及计算出轮胎滑移率;在车辆转弯时,通过转速传感器获得左、右前轮的转速,计算左、右后轮绕转向中心的线速度,进而得到左、右后轮需要的电机转速;通过向电机控制器发出指令,理的分配每个电机的输出转矩,调节电机的转速,从而调整车轮转速;将分配计算结果和车轮滑移率控制相结合,反馈到电子差速器,电子差速器最终分配给电机合适的转矩,达到车辆转向的稳定性。本发明无需要改变电机结构,即可实现电