
一种变速比串并联弹性驱动转动关节机构.pdf

宁馨****找我


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种变速比串并联弹性驱动转动关节机构.pdf
一种变速比串并联弹性驱动转动关节机构,属于机器人技术领域。本发明为了解决现有的机器人转动关节不能连续改变传动比,不具有缓冲的功能,致使关节受到冲击载荷会产生震动的问题。电机连接摩擦轮滑动导杆,小摩擦轮通过滑动键可在该导杆轴向滑动,并能跟随转动。大摩擦轮与转轴固连,转轴靠一对滚针轴承支撑,实现轴向移动。推力弹簧通过推力轴承作用在转轴上,使两摩擦轮压力;舵机带动两个曲柄摇杆机构运动;第一曲柄可间歇地带动第二曲柄运动,第一连杆带动止推块上下移动,止推块上开有凹槽,止推块上下移动过程中,滚动圆柱嵌入和嵌出凹槽,从

弹性驱动转动关节.pdf
本发明的目的在于提供弹性驱动转动关节,包括电机架、箱体、输出架、U型槽挡块、编码器、直流电机、减速箱、花键轴、弹簧、蜗轮、蜗杆,箱体与电机架固连,输出架通过U型槽挡块安装在箱体上,编码器、直流电机、减速箱依次安装在电机架里,花键轴安装在箱体里,减速箱的输出轴与花键轴连接,弹簧包括第一弹簧和第二弹簧,第一弹簧、蜗杆、第二弹簧依次套在花键轴上,蜗轮安装在箱体上与蜗杆配合,蜗轮两端的扁平轴端与U型槽挡块相配合。本发明小体积、大传动比、可自锁、抗冲击、输出角度大、通用性强、安装维护方便,在微小型仿生机器人领域有很
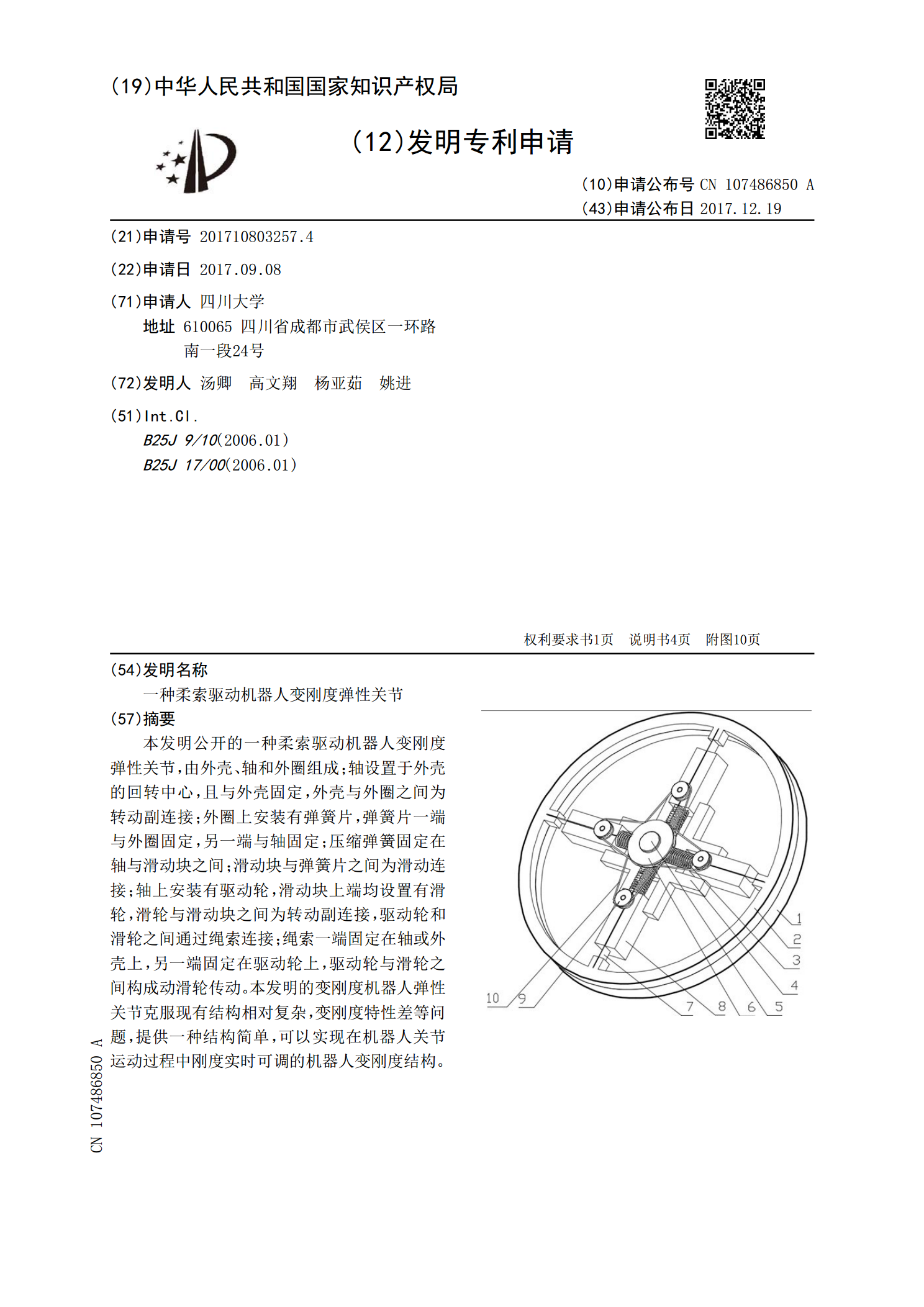
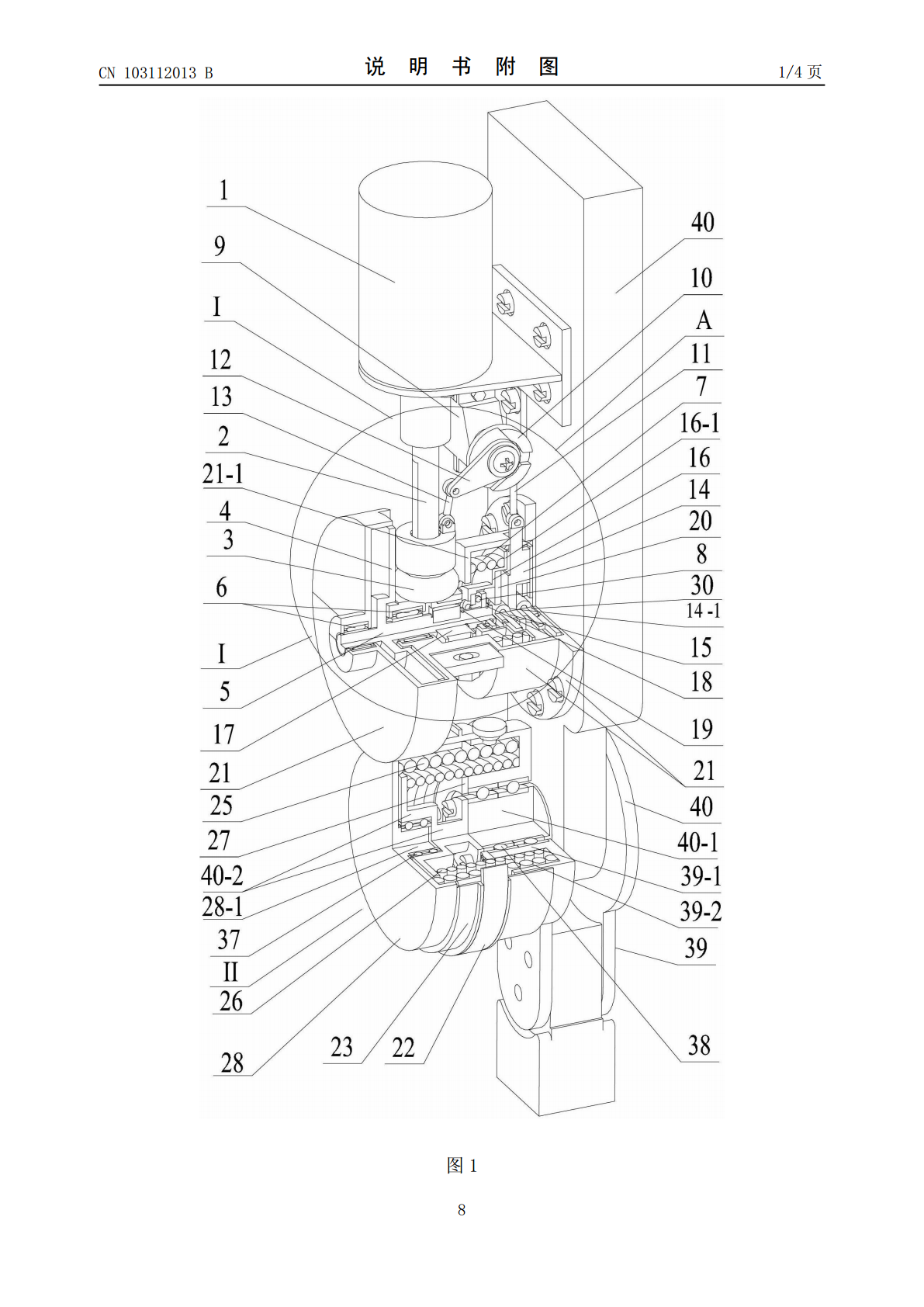
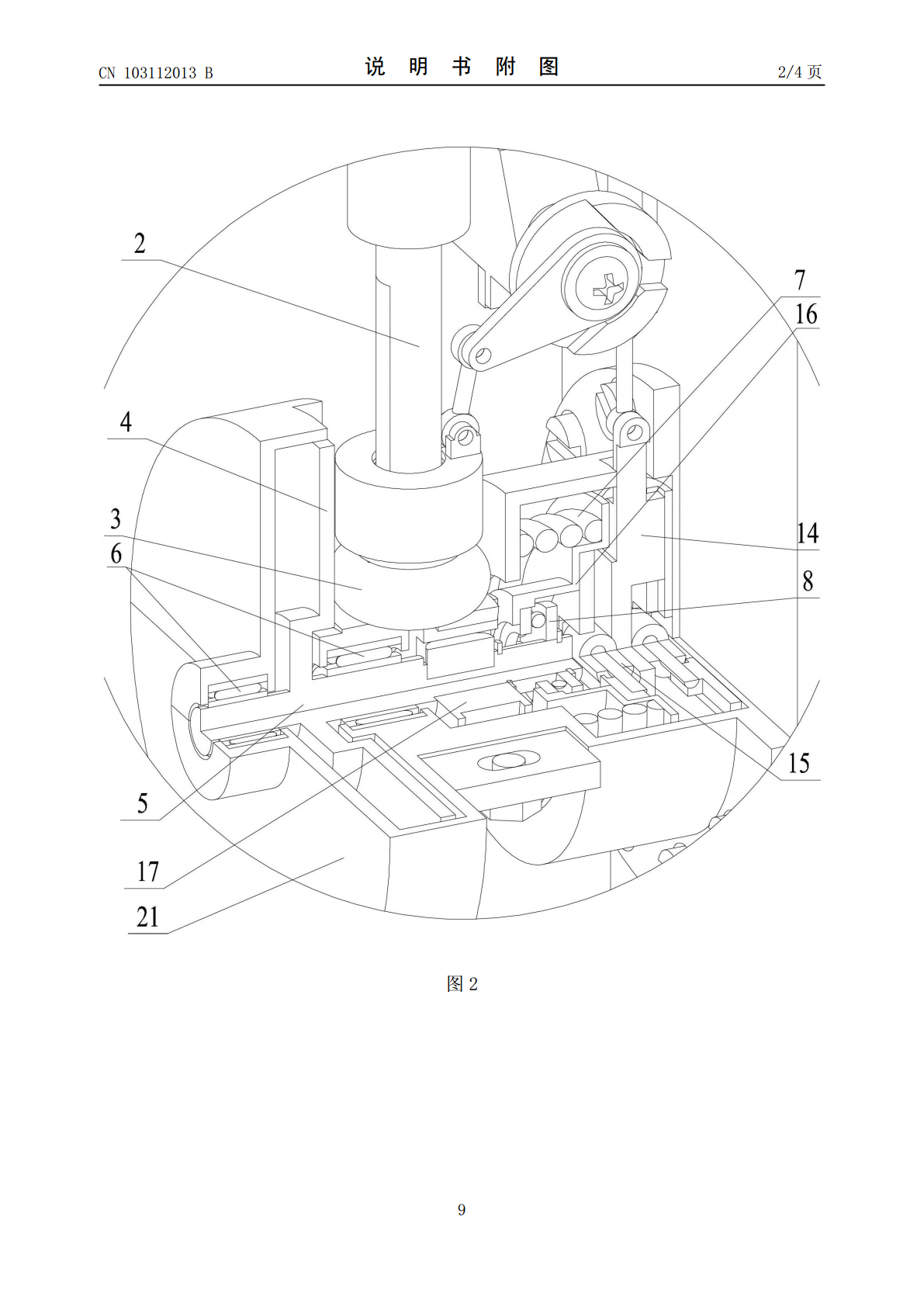
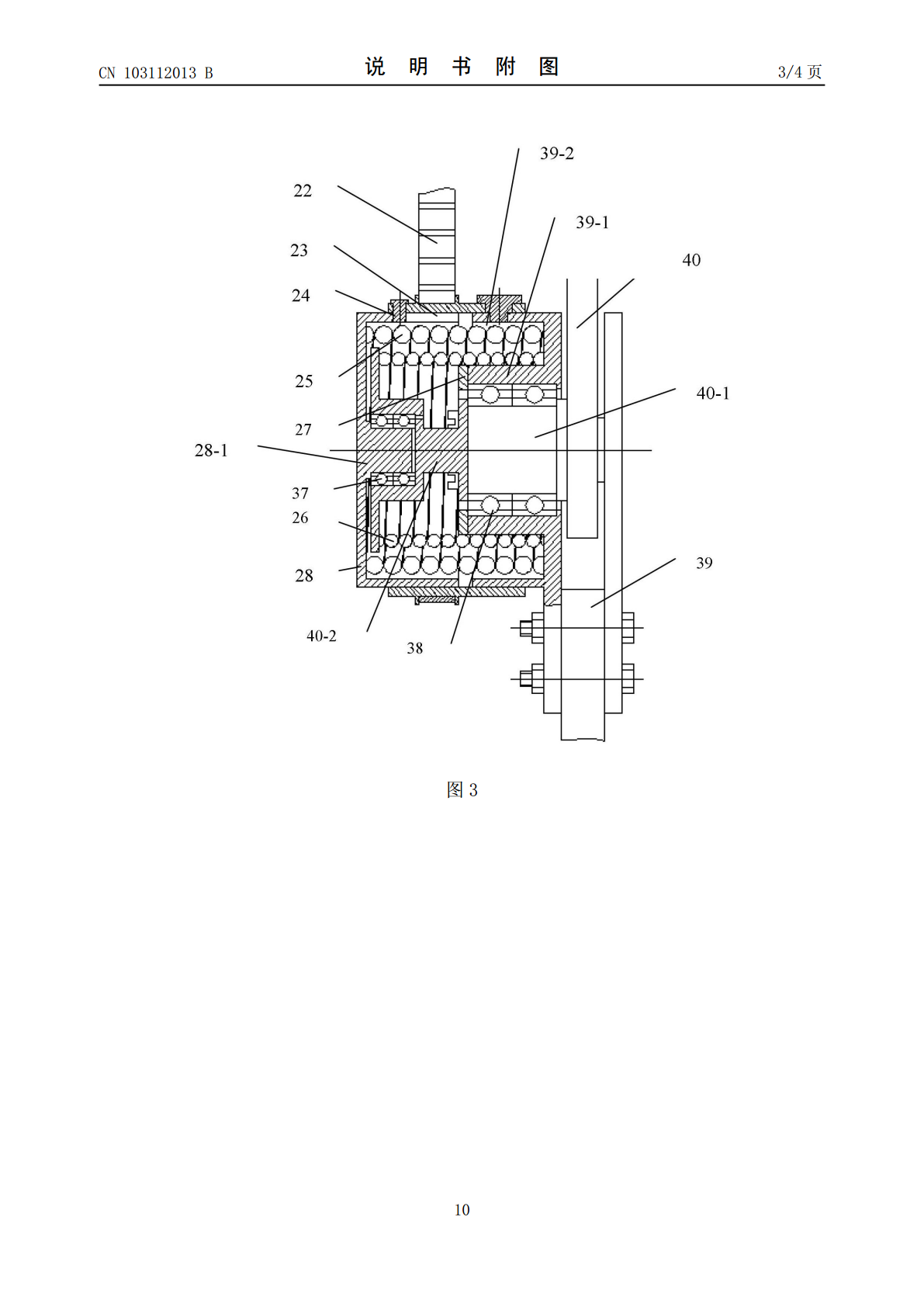
一种柔索驱动机器人变刚度弹性关节.pdf
本发明公开的一种柔索驱动机器人变刚度弹性关节,由外壳、轴和外圈组成;轴设置于外壳的回转中心,且与外壳固定,外壳与外圈之间为转动副连接;外圈上安装有弹簧片,弹簧片一端与外圈固定,另一端与轴固定;压缩弹簧固定在轴与滑动块之间;滑动块与弹簧片之间为滑动连接;轴上安装有驱动轮,滑动块上端均设置有滑轮,滑轮与滑动块之间为转动副连接,驱动轮和滑轮之间通过绳索连接;绳索一端固定在轴或外壳上,另一端固定在驱动轮上,驱动轮与滑轮之间构成动滑轮传动。本发明的变刚度机器人弹性关节克服现有结构相对复杂,变刚度特性差等问题,提供一
同轴转动大降速比分动机构.pdf
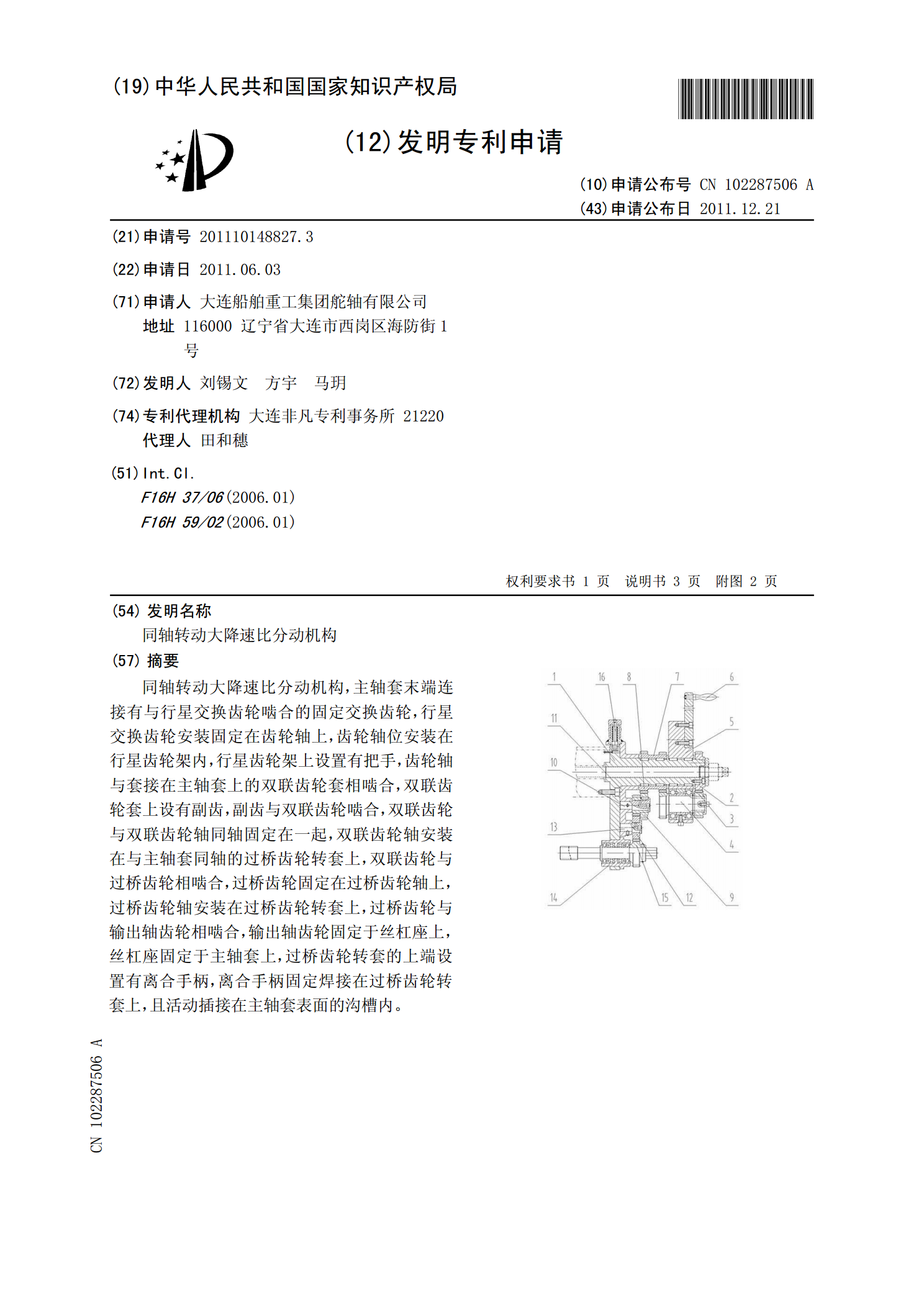
同轴转动大降速比分动机构,主轴套末端连接有与行星交换齿轮啮合的固定交换齿轮,行星交换齿轮安装固定在齿轮轴上,齿轮轴位安装在行星齿轮架内,行星齿轮架上设置有把手,齿轮轴与套接在主轴套上的双联齿轮套相啮合,双联齿轮套上设有副齿,副齿与双联齿轮啮合,双联齿轮与双联齿轮轴同轴固定在一起,双联齿轮轴安装在与主轴套同轴的过桥齿轮转套上,双联齿轮与过桥齿轮相啮合,过桥齿轮固定在过桥齿轮轴上,过桥齿轮轴安装在过桥齿轮转套上,过桥齿轮与输出轴齿轮相啮合,输出轴齿轮固定于丝杠座上,丝杠座固定于主轴套上,过桥齿轮转套的上端设置

用于机器人的钢丝传动变速比转动关节.pdf
用于机器人的钢丝传动变速比转动关节,它涉及一种下肢助力外骨骼机器人。本发明包括电机轴系、传动机构、大腿连接件和小腿连接件;电机轴系包括减速电机、轴承、轴承挡板和电机轴承座,减速电机固定在电机轴承座上,轴承挡板将轴承紧固在电机轴承座内;传动机构包括主动轴、从动轴、钢丝绳、凸轮、关节轴、关节轴轴承、钢丝绳固定块、预紧机构、主动轴轴承和从动轴轴承,传动机构上的主动轴与电机轴系上的减速电机的输出轴连接,传动机构上的关节轴的两端通过轴承与大腿连接件连接,小腿连接件的上端与关节轴固接。本发明用于下肢助力外骨骼机器人上