
用于机器人的钢丝传动变速比转动关节.pdf

英瑞****写意

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于机器人的钢丝传动变速比转动关节.pdf
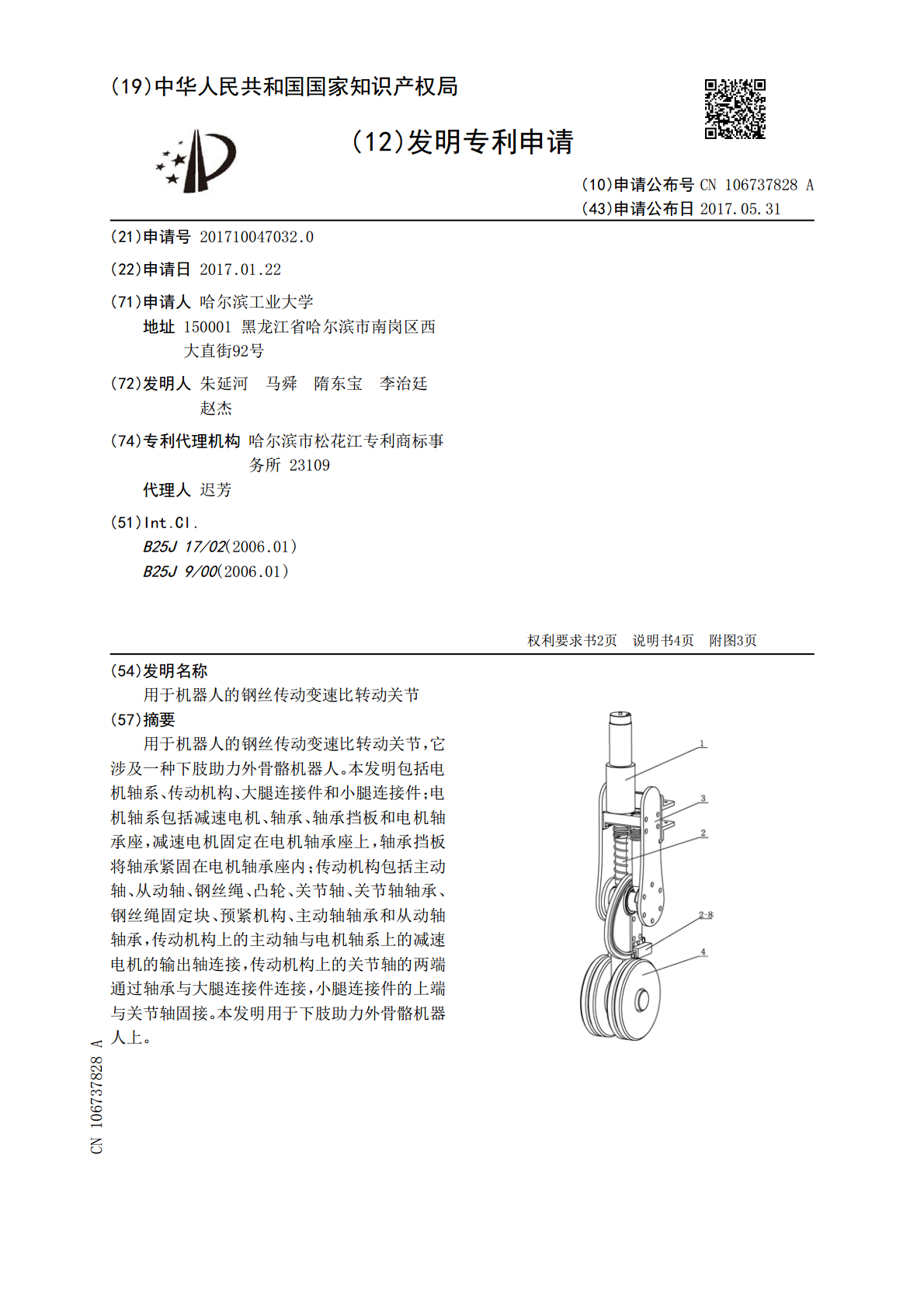
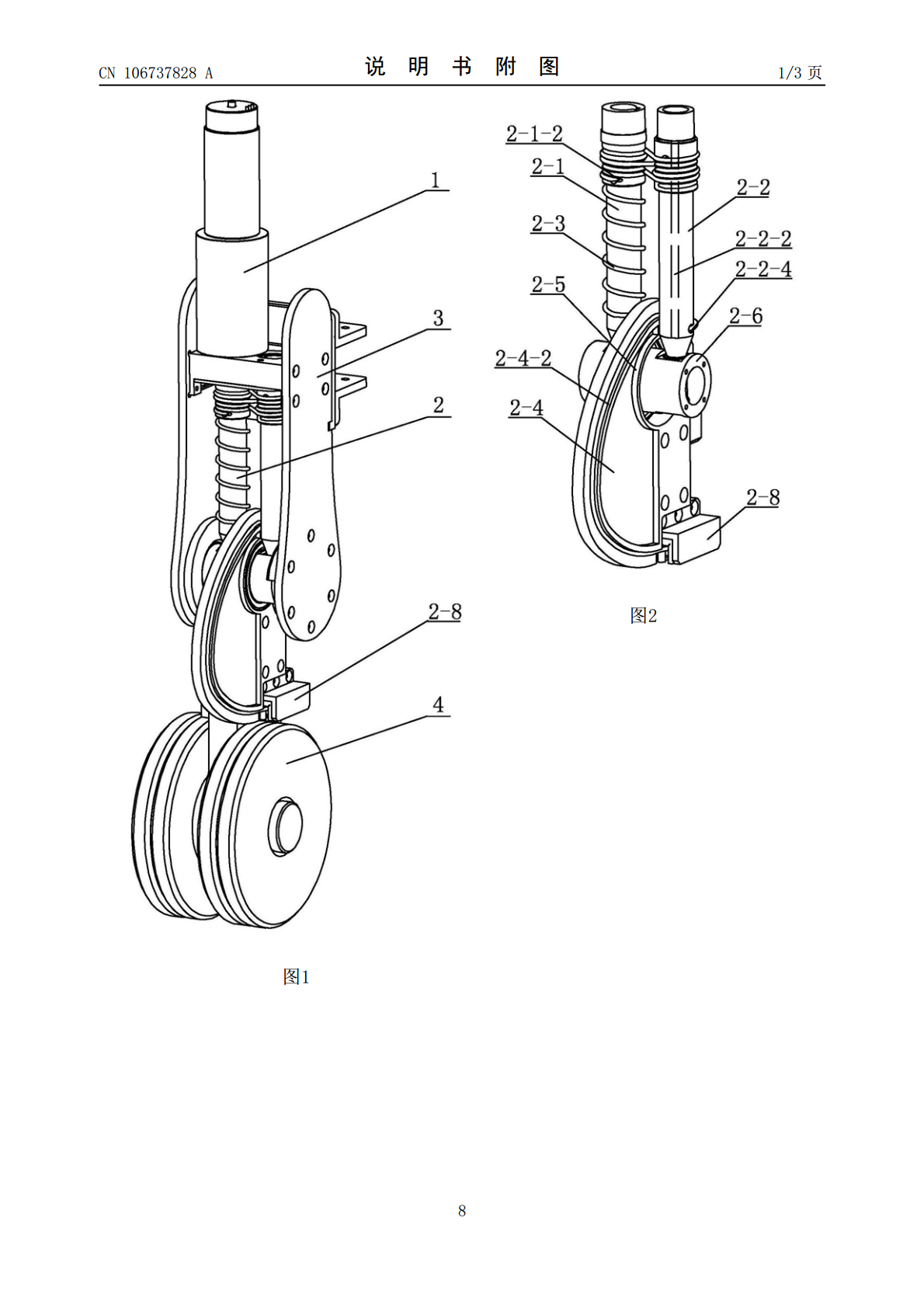
用于机器人的钢丝传动变速比转动关节,它涉及一种下肢助力外骨骼机器人。本发明包括电机轴系、传动机构、大腿连接件和小腿连接件;电机轴系包括减速电机、轴承、轴承挡板和电机轴承座,减速电机固定在电机轴承座上,轴承挡板将轴承紧固在电机轴承座内;传动机构包括主动轴、从动轴、钢丝绳、凸轮、关节轴、关节轴轴承、钢丝绳固定块、预紧机构、主动轴轴承和从动轴轴承,传动机构上的主动轴与电机轴系上的减速电机的输出轴连接,传动机构上的关节轴的两端通过轴承与大腿连接件连接,小腿连接件的上端与关节轴固接。本发明用于下肢助力外骨骼机器人上
利用钢丝传动的双输入轴变速比关节.pdf
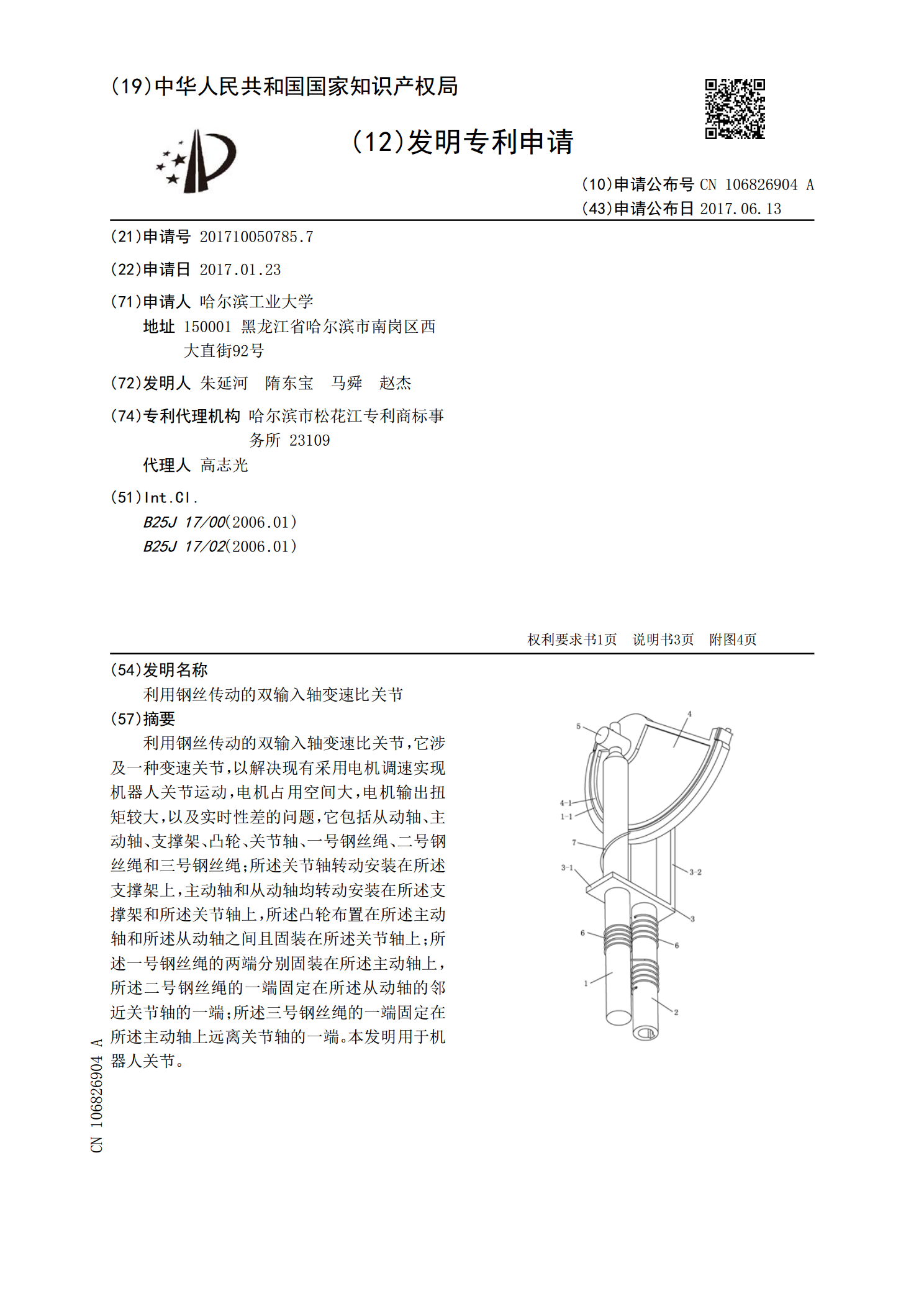
利用钢丝传动的双输入轴变速比关节,它涉及一种变速关节,以解决现有采用电机调速实现机器人关节运动,电机占用空间大,电机输出扭矩较大,以及实时性差的问题,它包括从动轴、主动轴、支撑架、凸轮、关节轴、一号钢丝绳、二号钢丝绳和三号钢丝绳;所述关节轴转动安装在所述支撑架上,主动轴和从动轴均转动安装在所述支撑架和所述关节轴上,所述凸轮布置在所述主动轴和所述从动轴之间且固装在所述关节轴上;所述一号钢丝绳的两端分别固装在所述主动轴上,所述二号钢丝绳的一端固定在所述从动轴的邻近关节轴的一端;所述三号钢丝绳的一端固定在所述主
一种基于钢丝传动变速比关节的下肢助力外骨骼机器人.pdf
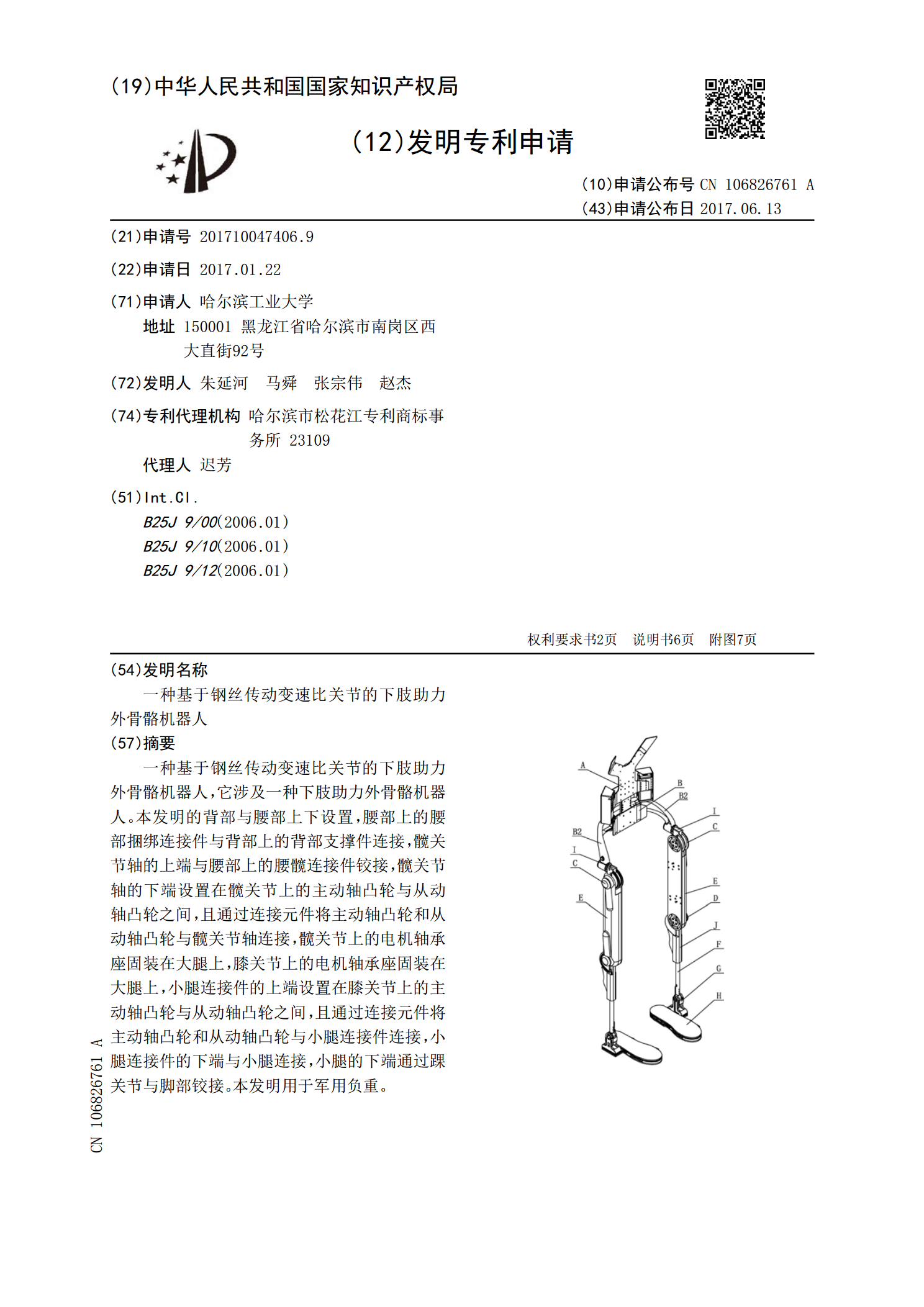
一种基于钢丝传动变速比关节的下肢助力外骨骼机器人,它涉及一种下肢助力外骨骼机器人。本发明的背部与腰部上下设置,腰部上的腰部捆绑连接件与背部上的背部支撑件连接,髋关节轴的上端与腰部上的腰髋连接件铰接,髋关节轴的下端设置在髋关节上的主动轴凸轮与从动轴凸轮之间,且通过连接元件将主动轴凸轮和从动轴凸轮与髋关节轴连接,髋关节上的电机轴承座固装在大腿上,膝关节上的电机轴承座固装在大腿上,小腿连接件的上端设置在膝关节上的主动轴凸轮与从动轴凸轮之间,且通过连接元件将主动轴凸轮和从动轴凸轮与小腿连接件连接,小腿连接件的下端

一种用于驱动机器人关节转动的装置.pdf
本发明公开了一种用于驱动机器人关节转动的装置,它包括齿轮转动机构、驱动齿轮转动机构转动的液压驱动机构,待转动机器人关节与齿轮转动机构固定相连。液压驱动机构包括第一液压缸、第二液压缸以及分别驱动第一液压缸和第二液压缸内活塞向相反的方向运动的驱动装置。齿轮转动机构包括齿轮以及平行设置的第一齿条和第二齿条,第一液压缸内活塞背离第一连接管的一侧与第一齿条一端固定相连,第二液压缸内活塞背离第二连接管的一侧与第二齿条一端固定相连,且齿轮分别与第一齿条和第二齿条相啮合。本发明相比现有技术,在能驱动机器人关节转动的前提下

时变轴距等速比传动装置.pdf
本发明公布一种基于平行四边形与等腰三角形组合的时变轴距等速比传动装置,主要应用于物料细碎加工的双光辊破碎机中两个光辊的等速比传动。包括相对布置的左输入齿轮和右输出齿轮;左输入齿轮相对于机架做定轴转动;右输出齿轮固定安装在让位滑块上,让位滑块滑动安装在机架上;还包括与左输入齿轮相啮合的第一行星轮,以及与右输出齿轮相啮合的第二行星轮;左输入齿轮、第一行星轮、第二行星轮与机架之间由平行四边形机构支撑;第二行星轮、右输出齿轮与机架之间由等腰三角形机构支撑。本发明既解决了轴距变化量足够大的问题,又具有足够的空间解决