
一种柔索驱动机器人变刚度弹性关节.pdf

韶敏****ab

1/10
2/10
3/10
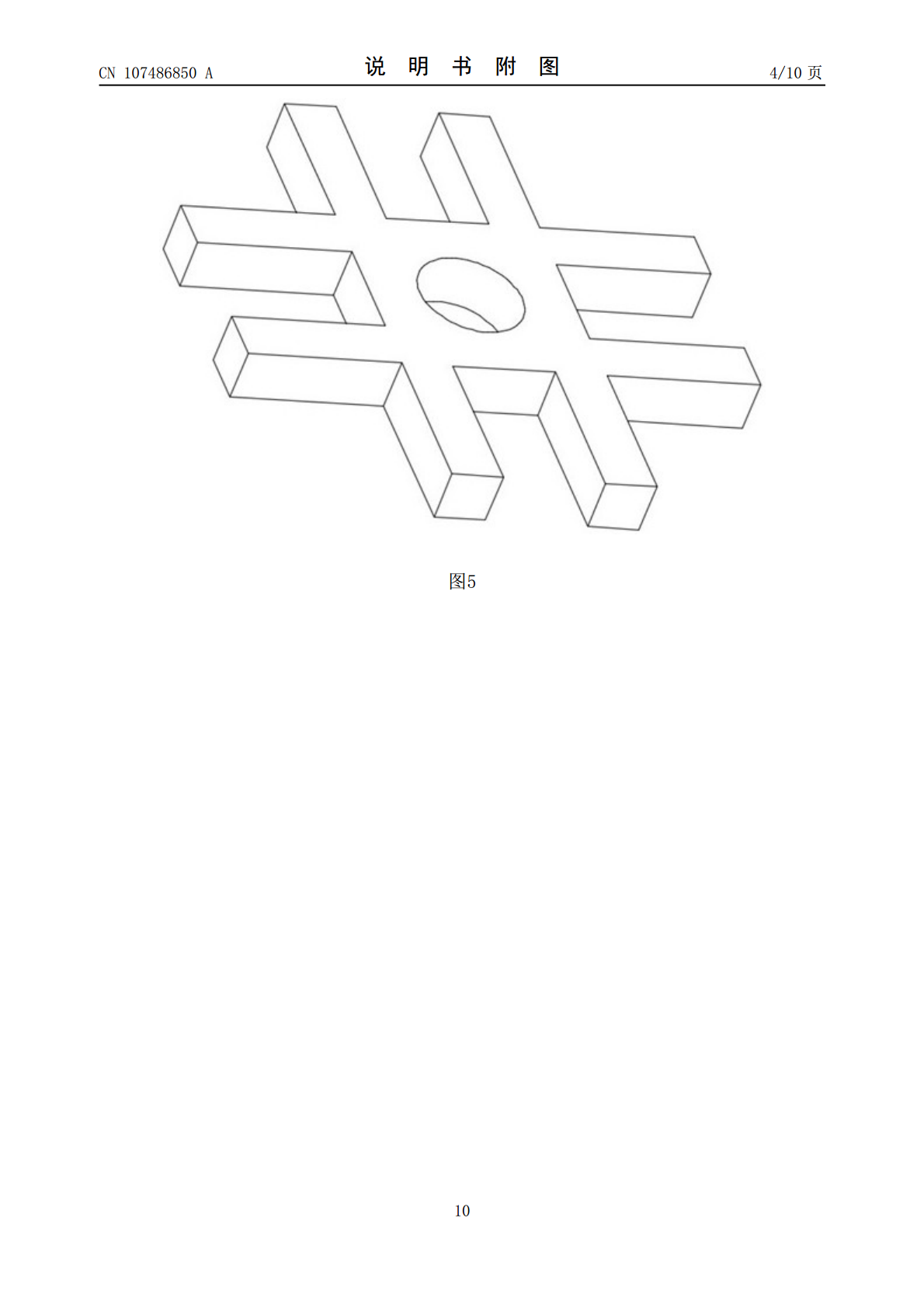
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种柔索驱动机器人变刚度弹性关节.pdf
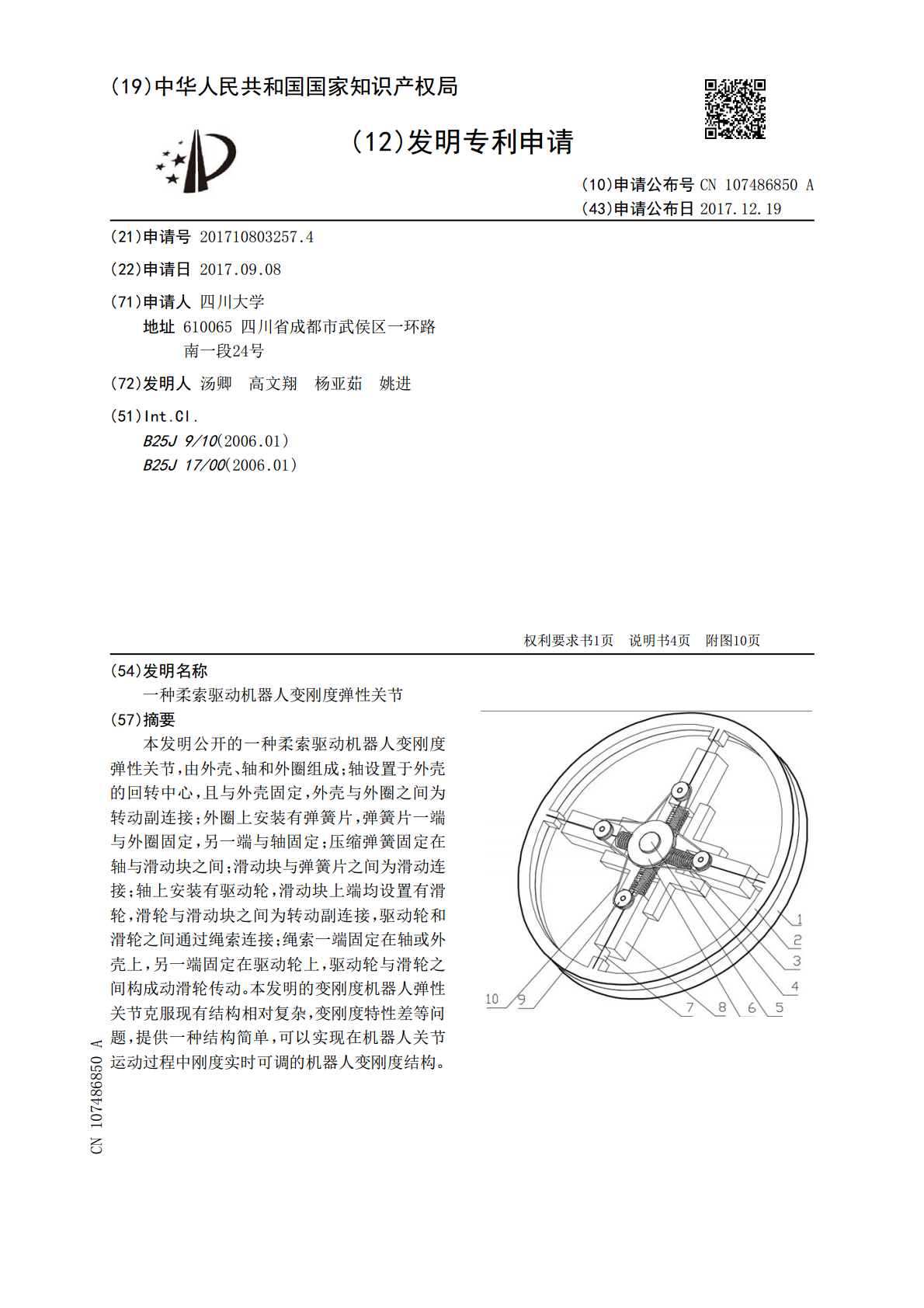
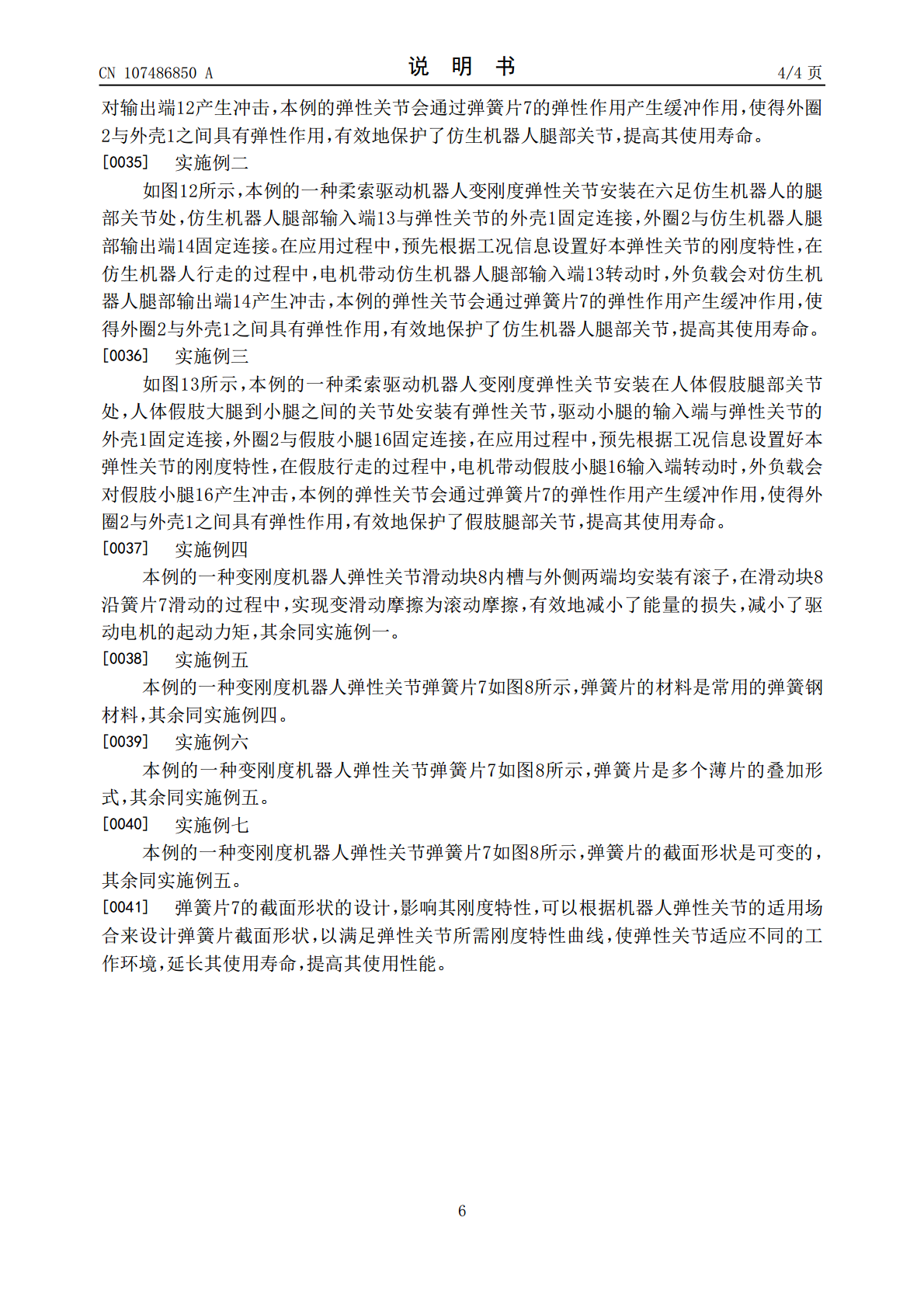
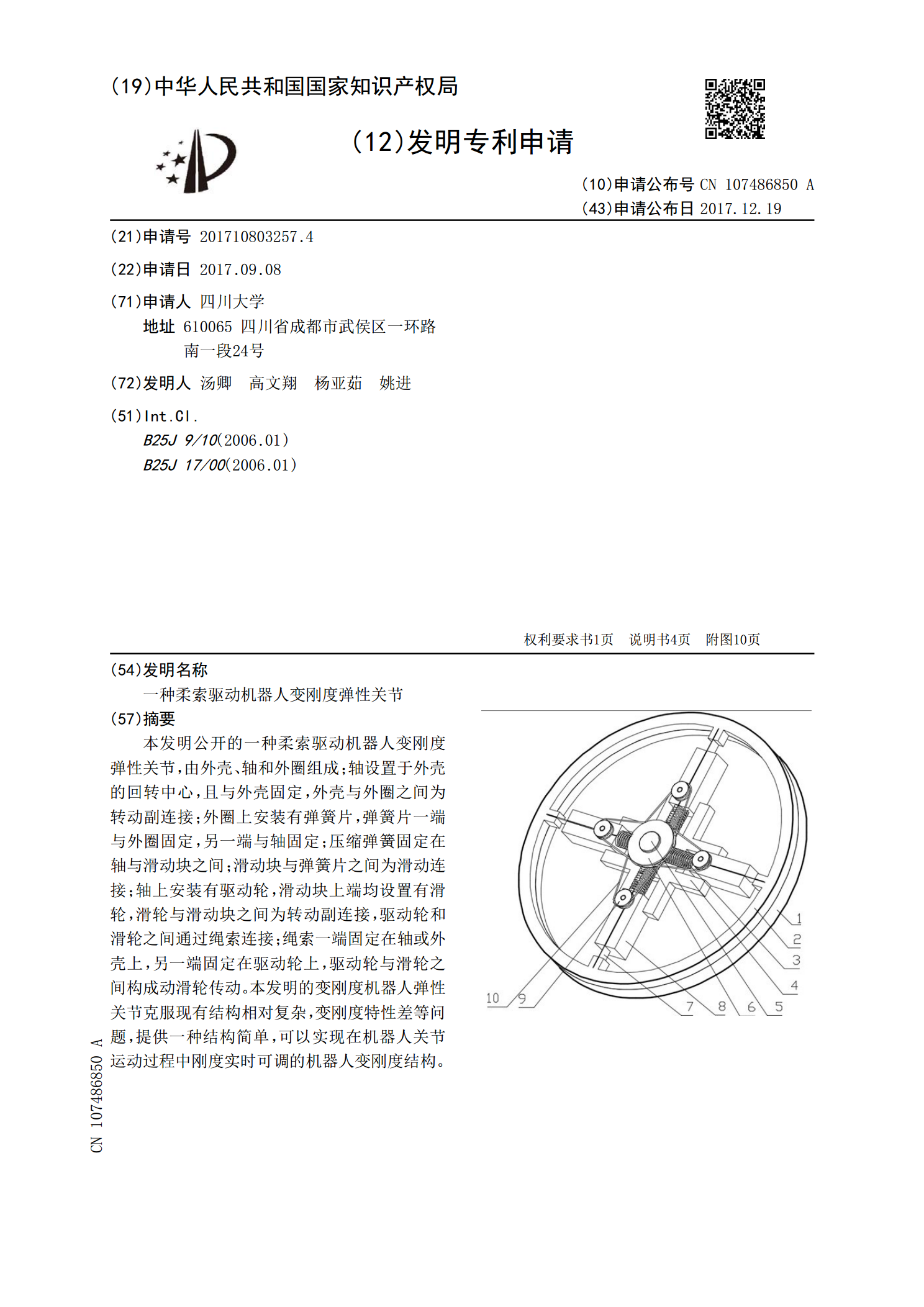
本发明公开的一种柔索驱动机器人变刚度弹性关节,由外壳、轴和外圈组成;轴设置于外壳的回转中心,且与外壳固定,外壳与外圈之间为转动副连接;外圈上安装有弹簧片,弹簧片一端与外圈固定,另一端与轴固定;压缩弹簧固定在轴与滑动块之间;滑动块与弹簧片之间为滑动连接;轴上安装有驱动轮,滑动块上端均设置有滑轮,滑轮与滑动块之间为转动副连接,驱动轮和滑轮之间通过绳索连接;绳索一端固定在轴或外壳上,另一端固定在驱动轮上,驱动轮与滑轮之间构成动滑轮传动。本发明的变刚度机器人弹性关节克服现有结构相对复杂,变刚度特性差等问题,提供一

一种变刚度机器人弹性关节.pdf
本发明公开的一种变刚度机器人弹性关节,由外壳、轴和外圈组成,轴设置于外壳的回转中心,与外壳之间固定,外壳与外圈之间为转动副连接;外圈上安装有多个弹簧片,每个弹簧片一端与外圈固联,另一端与轴固联;弹簧片中间均安装有一个活动卡爪,与弹簧片之间为滑动连接,活动卡爪底部与齿盘之间为螺旋传动连接;齿盘底部设置有端面齿,与伞齿之间构成齿轮传动连接;轴穿过齿盘的旋转中心,与齿盘之间为转动副连接;伞齿径向穿过外壳,且外壳之间为转动副连接。本发明的一种变刚度机器人弹性关节克服现有结构相对复杂,变刚度特性差等问题,提供一种结
一种完全约束柔索并联机器人变刚度装置.pdf
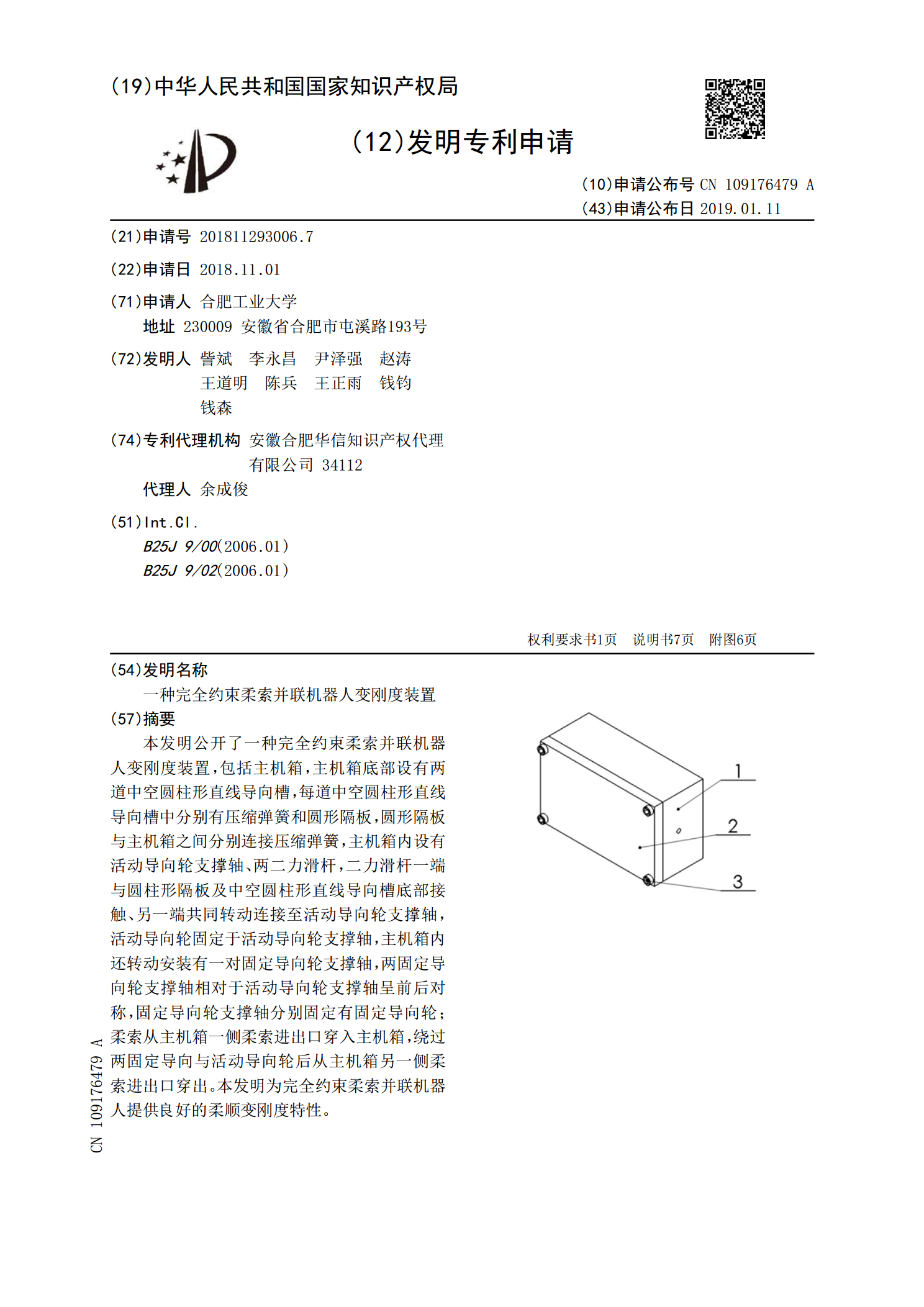
本发明公开了一种完全约束柔索并联机器人变刚度装置,包括主机箱,主机箱底部设有两道中空圆柱形直线导向槽,每道中空圆柱形直线导向槽中分别有压缩弹簧和圆形隔板,圆形隔板与主机箱之间分别连接压缩弹簧,主机箱内设有活动导向轮支撑轴、两二力滑杆,二力滑杆一端与圆柱形隔板及中空圆柱形直线导向槽底部接触、另一端共同转动连接至活动导向轮支撑轴,活动导向轮固定于活动导向轮支撑轴,主机箱内还转动安装有一对固定导向轮支撑轴,两固定导向轮支撑轴相对于活动导向轮支撑轴呈前后对称,固定导向轮支撑轴分别固定有固定导向轮;柔索从主机箱一侧
一种弹性柔索驱动单关节实验测试平台、控制方法及用途.pdf
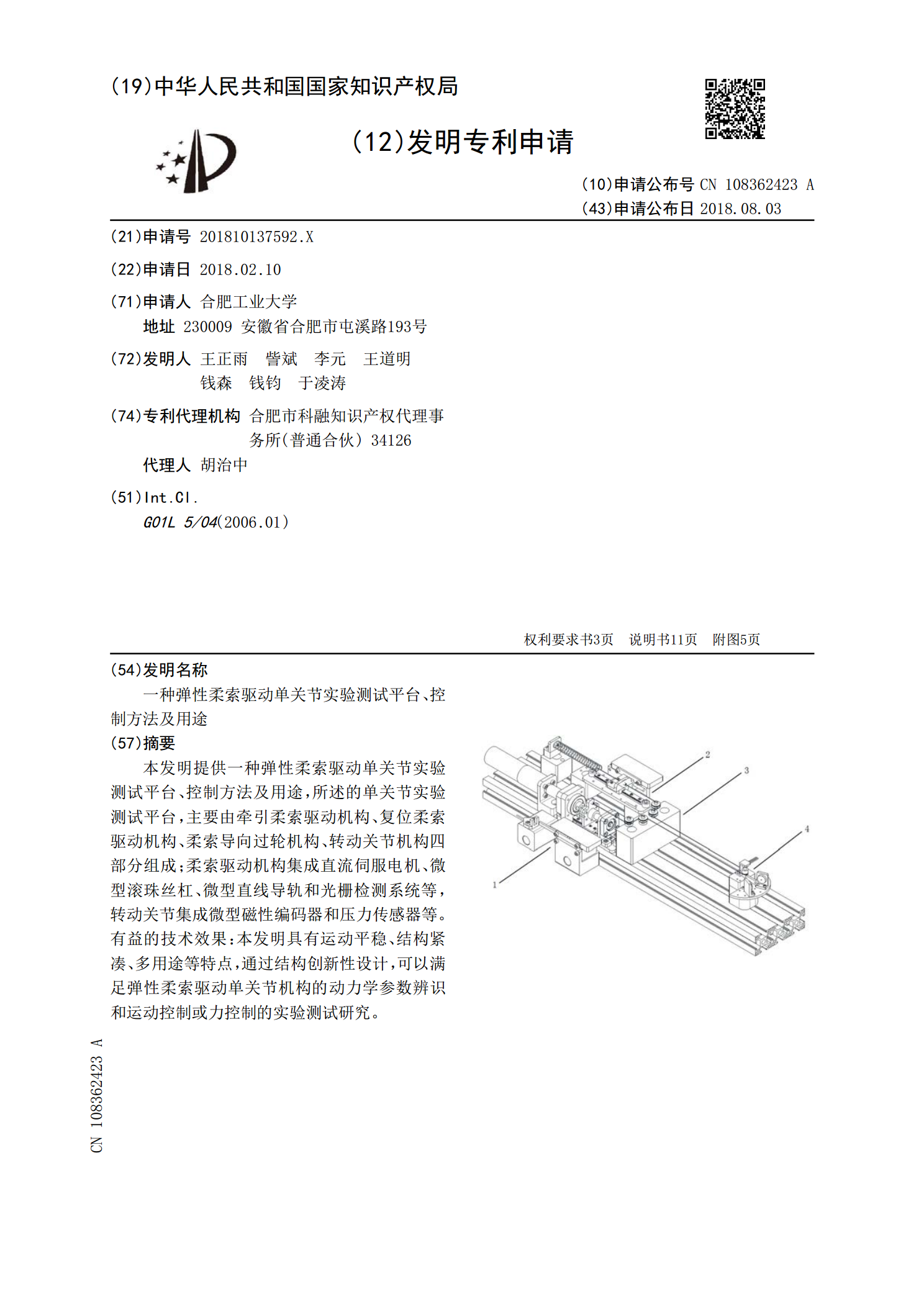
本发明提供一种弹性柔索驱动单关节实验测试平台、控制方法及用途,所述的单关节实验测试平台,主要由牵引柔索驱动机构、复位柔索驱动机构、柔索导向过轮机构、转动关节机构四部分组成;柔索驱动机构集成直流伺服电机、微型滚珠丝杠、微型直线导轨和光栅检测系统等,转动关节集成微型磁性编码器和压力传感器等。有益的技术效果:本发明具有运动平稳、结构紧凑、多用途等特点,通过结构创新性设计,可以满足弹性柔索驱动单关节机构的动力学参数辨识和运动控制或力控制的实验测试研究。

一种凸轮结构变刚度弹性关节.pdf
本发明公开的一种凸轮结构变刚度弹性关节,由外壳、轴和外圈组成,轴设置于外壳的回转中心,且与外壳固定,外壳与外圈之间为转动副连接;外圈上径向安装有对称的多个弹簧片,每个弹簧片一端与外圈固联,另一端穿过弹簧与轴固联;弹簧一端连接在轴上,另一端连接在滑动块上;滑动块安装在弹簧片中间部位,且与弹簧片之间为滑动连接;轴上安装有凸轮盘,凸轮盘为中心对称结构,且与轴之间为转动副连接;每个滑动块上端均设置有凸轮滚子,凸轮盘与凸轮滚子构成凸轮传动。本发明的一种凸轮结构变刚度弹性关节克服现有结构相对复杂,变刚度特性差等问题,