
电动商用车电池箱取放装置.pdf

一条****贺6


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

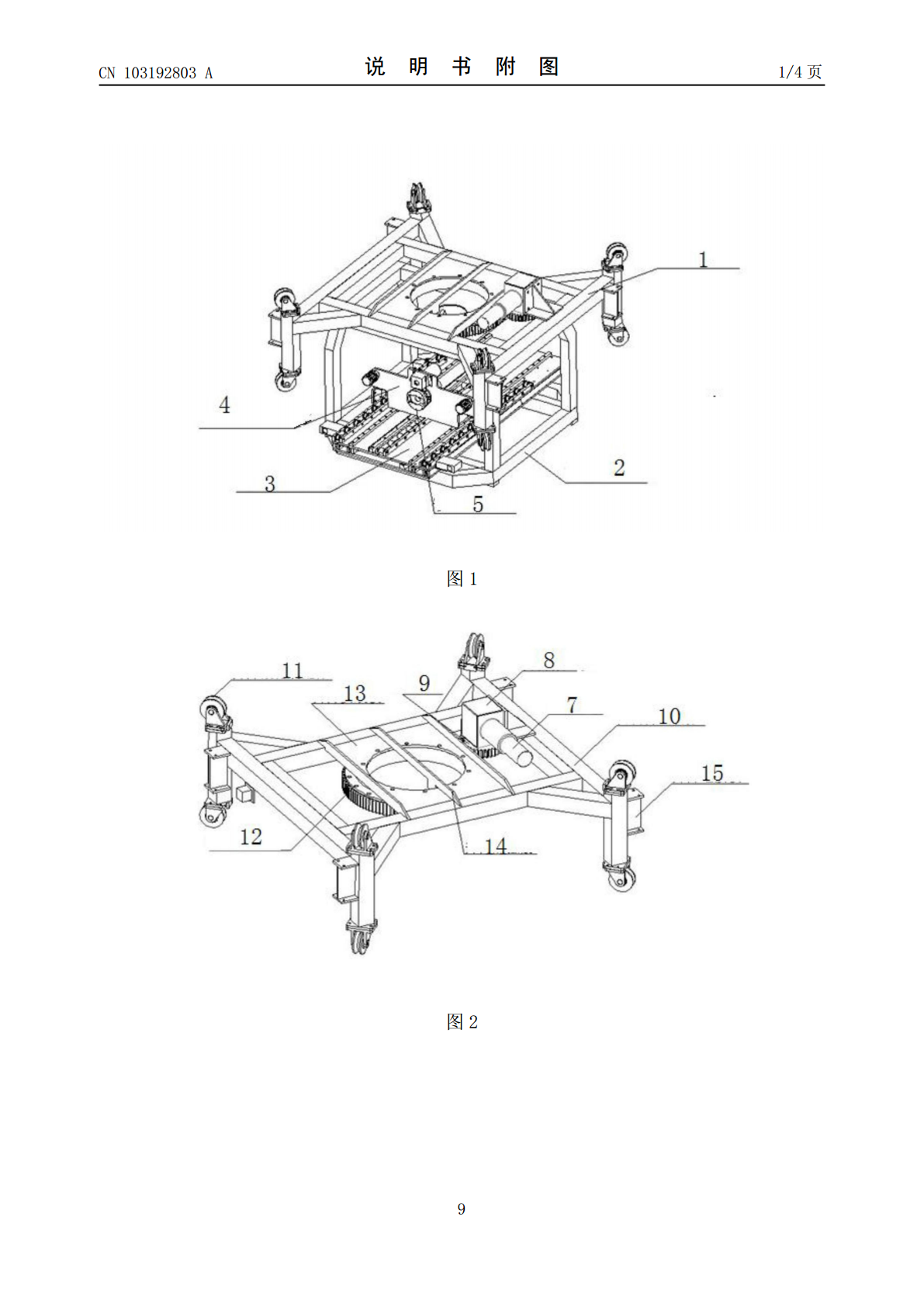
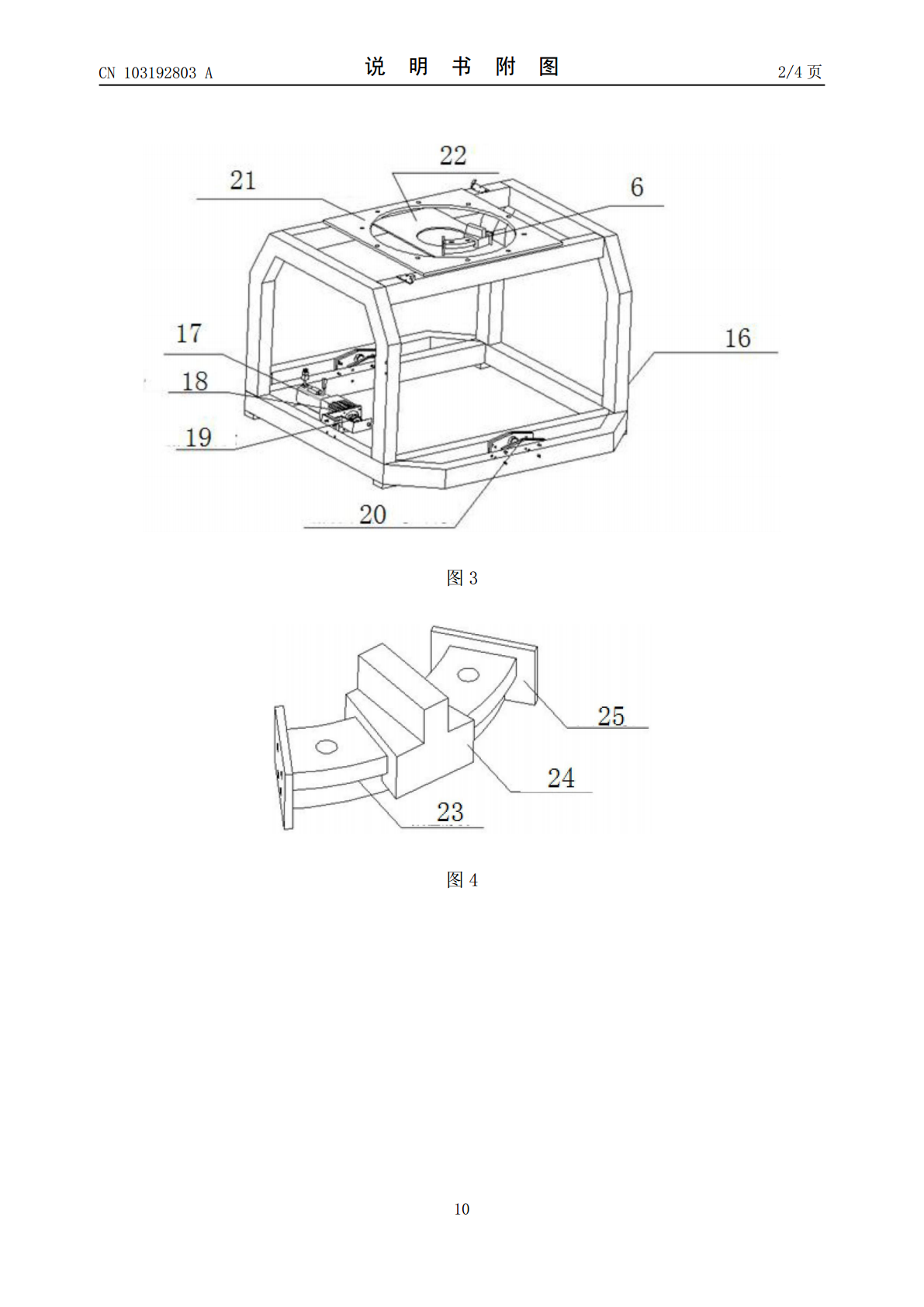
电动商用车电池箱取放装置.pdf
本发明公开了电动商用车电池箱取放装置换电装置,它不需复杂的转动配合,能够在有限的空间内完成转身与电池的更换,从而减小整个换电装置的体积,同时不需要复杂的结构,从而便于维护,提供了工作效率。它包括安装在换电机器人框架内的可纵向移动的升降组合,升降组合下部悬挂可原地转动的载物台组合,载物台组合上设有货叉组合以及电池推手组合;所述升降组合四角设有与换电机器人框架的矩形钢立柱相配合的V型轮组;在升降组合上还设有载物台组合转动驱动装置和限位装置。
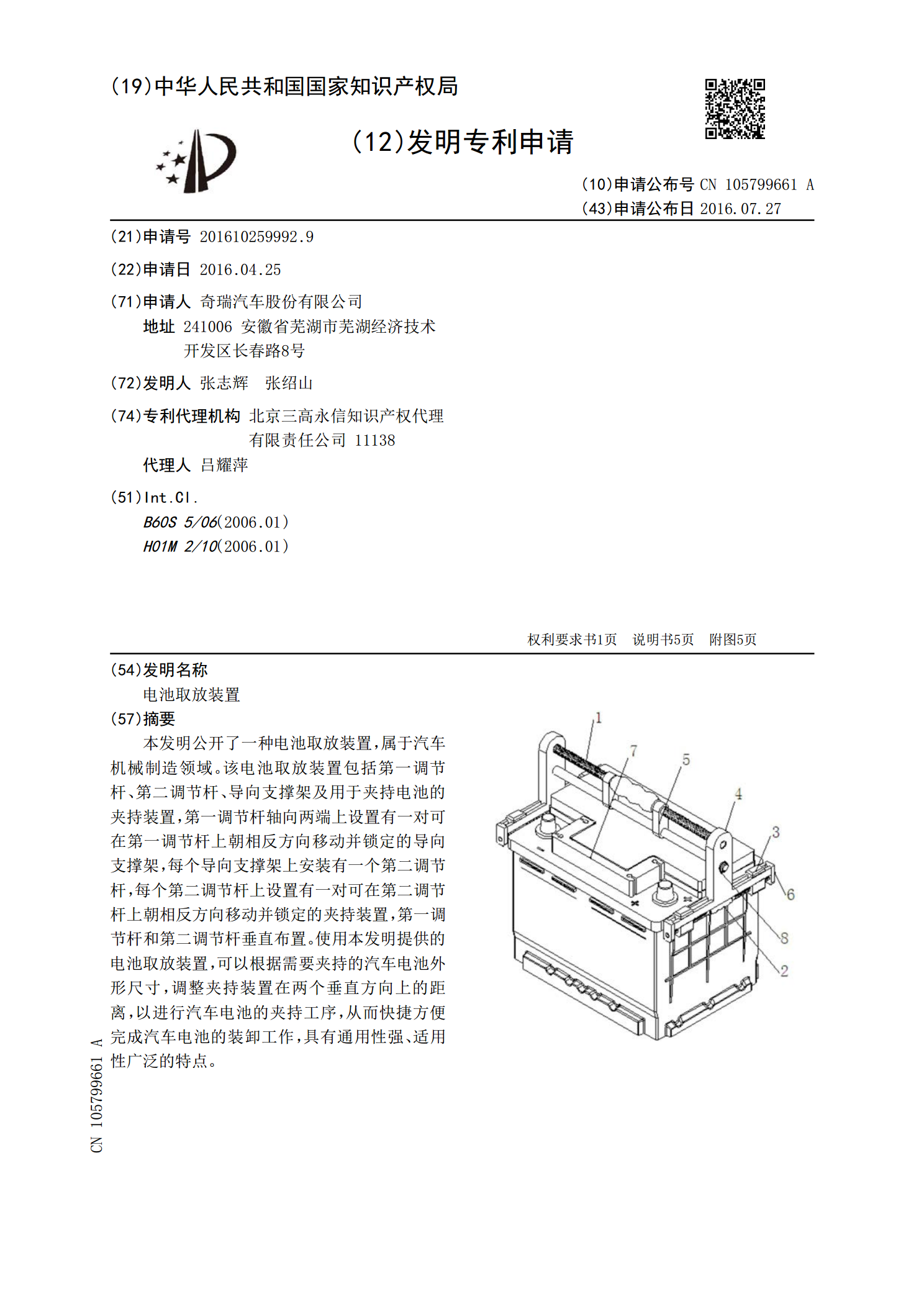
电池取放装置.pdf
本发明公开了一种电池取放装置,属于汽车机械制造领域。该电池取放装置包括第一调节杆、第二调节杆、导向支撑架及用于夹持电池的夹持装置,第一调节杆轴向两端上设置有一对可在第一调节杆上朝相反方向移动并锁定的导向支撑架,每个导向支撑架上安装有一个第二调节杆,每个第二调节杆上设置有一对可在第二调节杆上朝相反方向移动并锁定的夹持装置,第一调节杆和第二调节杆垂直布置。使用本发明提供的电池取放装置,可以根据需要夹持的汽车电池外形尺寸,调整夹持装置在两个垂直方向上的距离,以进行汽车电池的夹持工序,从而快捷方便完成汽车电池的装

管状工件取放装置及存取箱.pdf
本发明提供一种管状工件取放装置及存取箱,属于工件存取的技术领域,包括水平运动机构、竖向运动机构、旋转机构以及用于伸入管状工件内的取物杆;水平运动机构包括滑动设置在工件架顶板上的横向滑动板以及滑动设置在横向滑动板上的纵向滑动架;竖向运动机构包括设置在纵向滑动架朝向工件架开口一端的中空结构的连接件、穿过连接件且与连接件滑动配合的竖向滑动管、设置在竖向滑动管外壁上的齿条、与齿条啮合的齿轮以及用于为齿轮提供动力的电机;旋转机构包括转动设置在竖向滑动管上的转动杆;取物杆的第一端与转动杆连接。使用本发明后,取放管状工
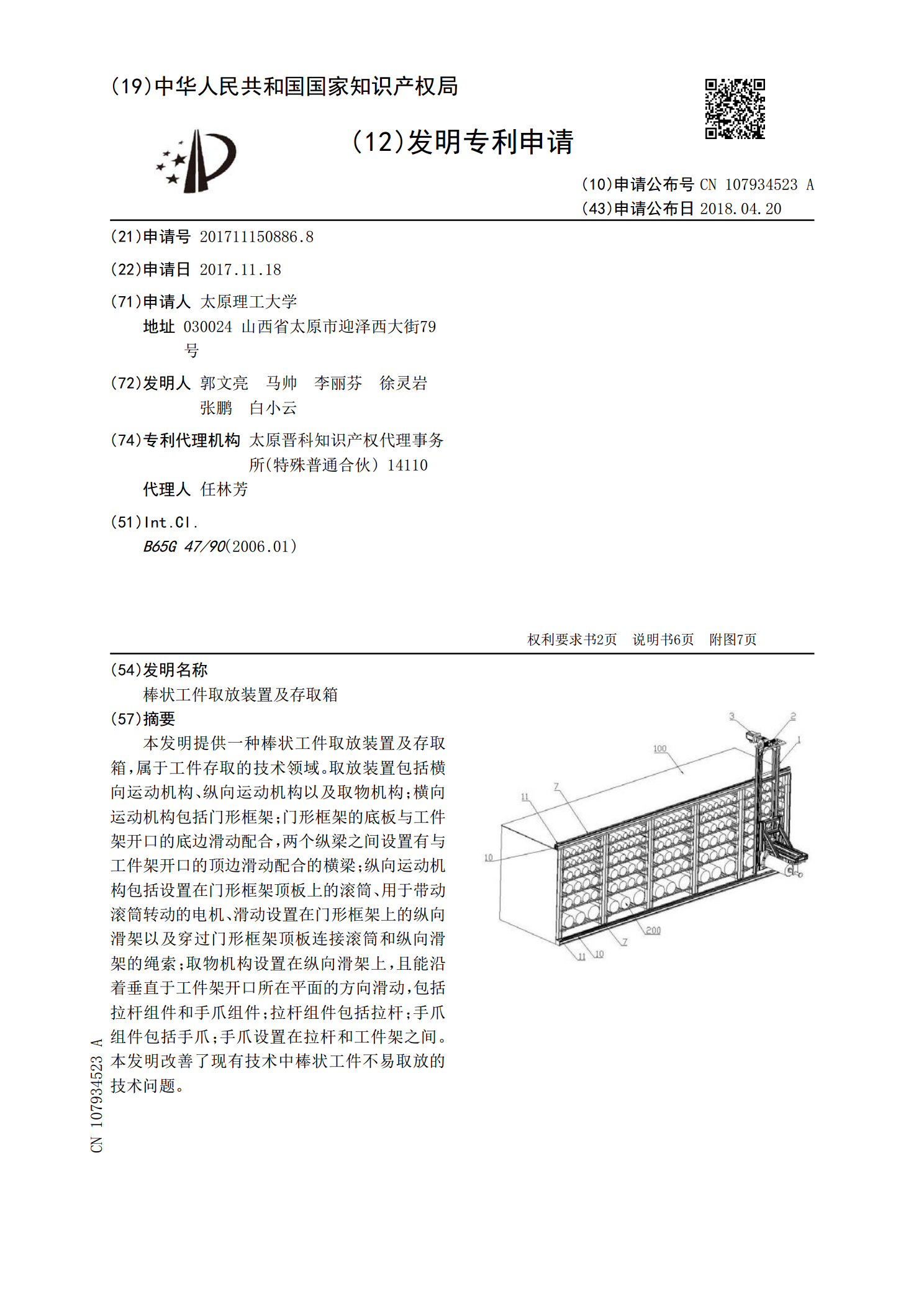
棒状工件取放装置及存取箱.pdf
本发明提供一种棒状工件取放装置及存取箱,属于工件存取的技术领域。取放装置包括横向运动机构、纵向运动机构以及取物机构;横向运动机构包括门形框架;门形框架的底板与工件架开口的底边滑动配合,两个纵梁之间设置有与工件架开口的顶边滑动配合的横梁;纵向运动机构包括设置在门形框架顶板上的滚筒、用于带动滚筒转动的电机、滑动设置在门形框架上的纵向滑架以及穿过门形框架顶板连接滚筒和纵向滑架的绳索;取物机构设置在纵向滑架上,且能沿着垂直于工件架开口所在平面的方向滑动,包括拉杆组件和手爪组件;拉杆组件包括拉杆;手爪组件包括手爪;
纯电动商用车动力电池箱上箱体.pdf
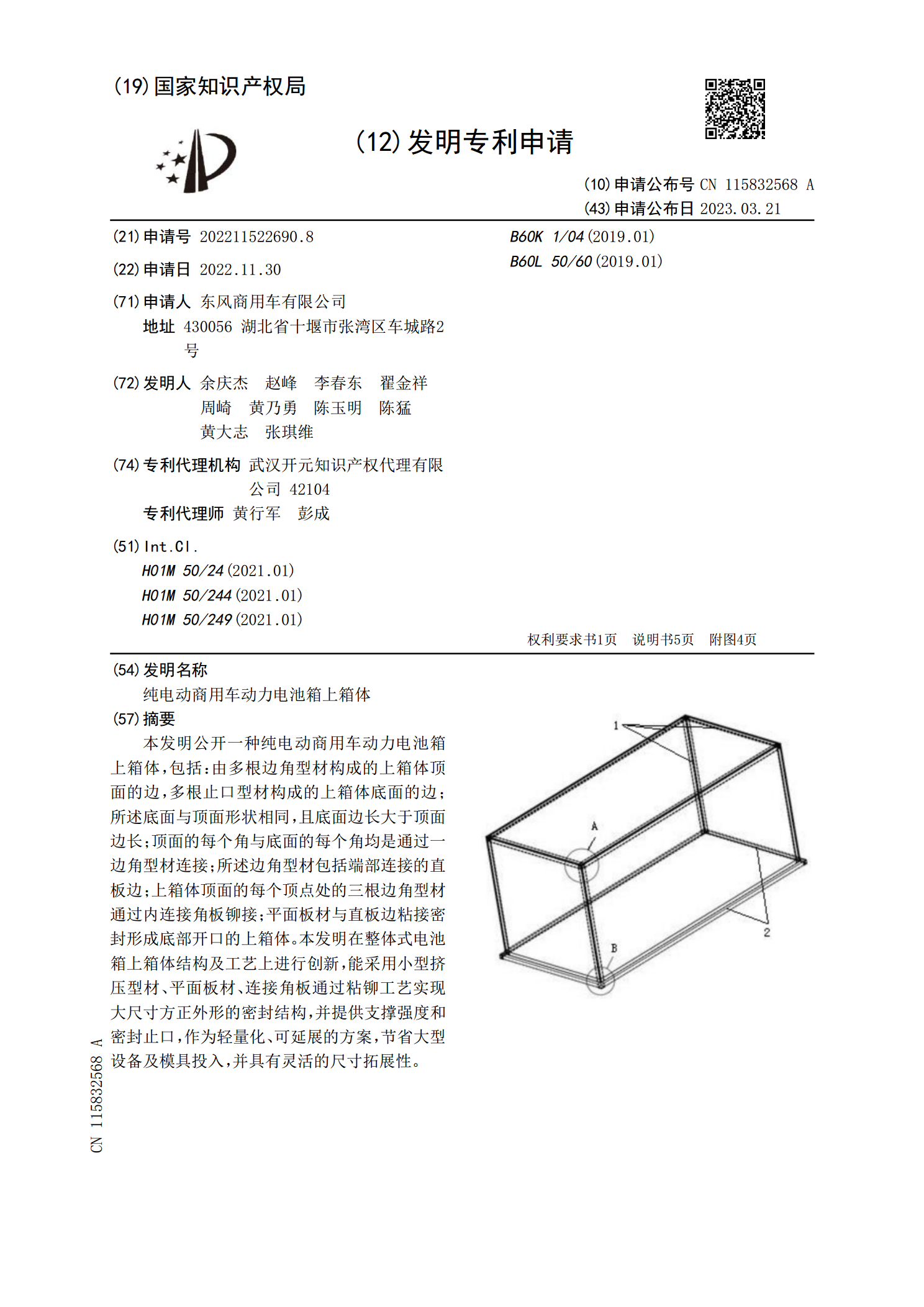
本发明公开一种纯电动商用车动力电池箱上箱体,包括:由多根边角型材构成的上箱体顶面的边,多根止口型材构成的上箱体底面的边;所述底面与顶面形状相同,且底面边长大于顶面边长;顶面的每个角与底面的每个角均是通过一边角型材连接;所述边角型材包括端部连接的直板边;上箱体顶面的每个顶点处的三根边角型材通过内连接角板铆接;平面板材与直板边粘接密封形成底部开口的上箱体。本发明在整体式电池箱上箱体结构及工艺上进行创新,能采用小型挤压型材、平面板材、连接角板通过粘铆工艺实现大尺寸方正外形的密封结构,并提供支撑强度和密封止口,作