
基于虚拟触角的自主车辆运动规划方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于虚拟触角的自主车辆运动规划方法.docx
基于虚拟触角的自主车辆运动规划方法基于虚拟触角的自主车辆运动规划方法摘要:自主车辆的运动规划是实现车辆自主决策和安全导航的关键技术之一。本文提出一种基于虚拟触角的自主车辆运动规划方法。该方法通过模拟昆虫等生物的触角感知机制,将环境信息转化为虚拟触角的信息,并利用这些信息进行路径规划和障碍物避障。实验结果表明,该方法具有较高的运动规划准确性和实时性,能够有效应对复杂环境中的多个障碍物。1.引言自主车辆的运动规划是自主驾驶技术中的核心问题之一。在实际道路环境中,车辆需要根据路况和障碍物情况做出决策,如避障、转

基于势能场虚拟力的智能网联车辆运动规划.pptx
汇报人:CONTENTS添加章节标题势能场虚拟力概述势能场虚拟力的概念势能场虚拟力在智能网联车辆运动规划中的应用势能场虚拟力的优势与局限性基于势能场虚拟力的智能网联车辆运动规划方法势能场虚拟力的构建方法基于势能场虚拟力的车辆运动规划算法算法的优化与改进实验验证与结果分析实验环境与条件实验过程与结果结果分析与讨论实际应用与前景展望基于势能场虚拟力的智能网联车辆运动规划在现实生活中的应用未来发展方向与挑战对相关领域的影响与贡献汇报人:

基于车辆运动模型的无人车辆野外路径规划方法.pdf
本发明涉及无人驾驶技术领域,尤其是一种基于车辆运动模型的无人车辆野外路径规划方法。包括以下步骤:一、建立环境三维地图;二、定义车辆行驶模型;三、车辆按控制周期行驶;四、输出规划方案。按照本发明进行路径规划后,能够顺利躲避障碍,满足车轮转向角速度限制,使用尽量少的路径完成了规划要求,而且每段路径都给出了详细的转弯角度、行驶方向,为路径跟踪提供了指导,融合了优化算法、车辆运动学多方面的信息,为解决现有的路径规划存在的问题做了一个新的探索。

基于行车风险分析的车辆强化学习运动规划方法.pdf
一种基于行车风险分析的车辆强化学习运动规划方法,包括:获取本车所在车道的两侧边界信息<base:Imagehe=@48@wi=@91@file=@DDA0003574494400000011.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/><base:Imagehe=@48@wi=@70@file=@DDA0003574494400000012.JPG@imgContent=@drawing@imgFo
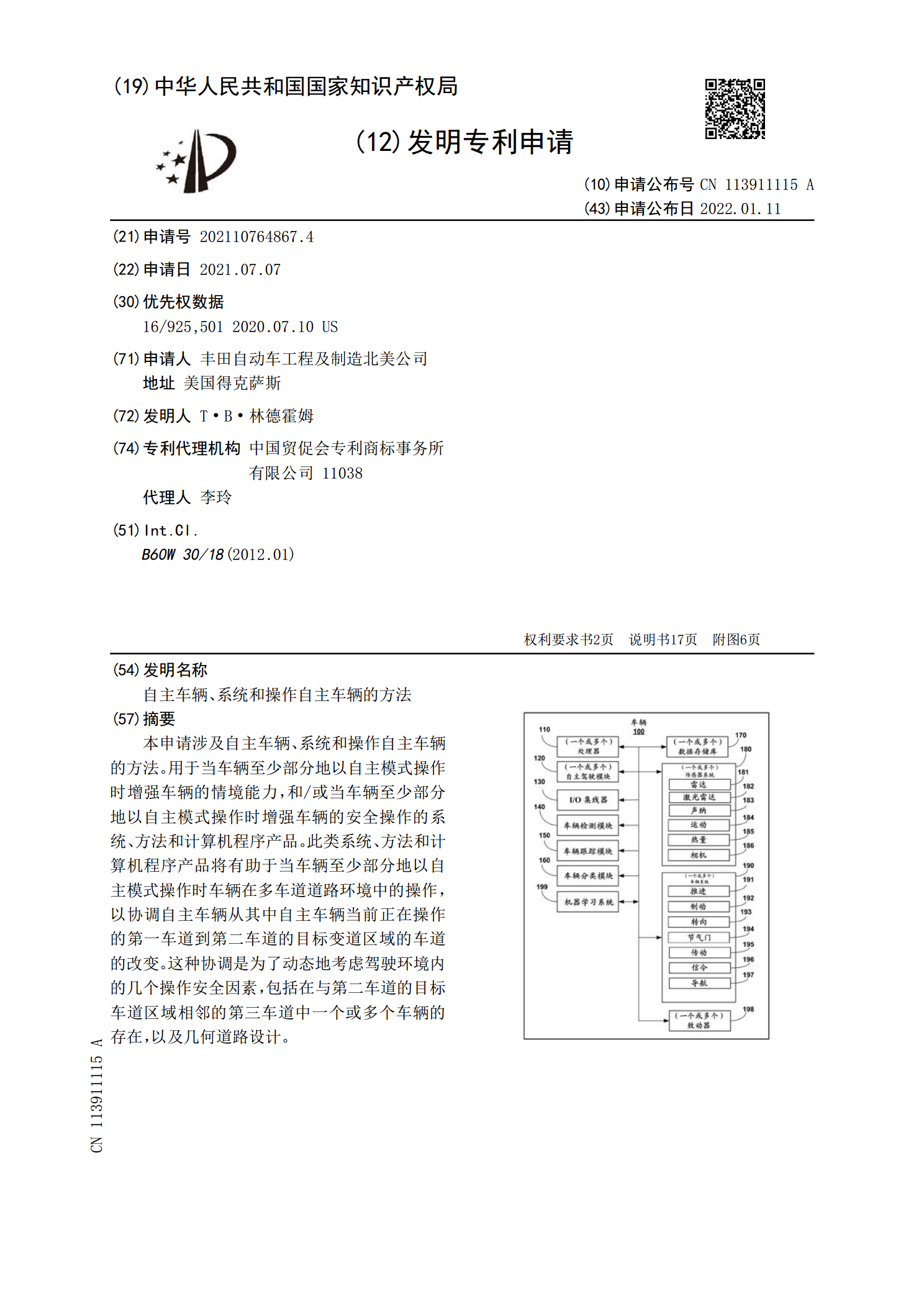
自主车辆、系统和操作自主车辆的方法.pdf
本申请涉及自主车辆、系统和操作自主车辆的方法。用于当车辆至少部分地以自主模式操作时增强车辆的情境能力,和/或当车辆至少部分地以自主模式操作时增强车辆的安全操作的系统、方法和计算机程序产品。此类系统、方法和计算机程序产品将有助于当车辆至少部分地以自主模式操作时车辆在多车道道路环境中的操作,以协调自主车辆从其中自主车辆当前正在操作的第一车道到第二车道的目标变道区域的车道的改变。这种协调是为了动态地考虑驾驶环境内的几个操作安全因素,包括在与第二车道的目标车道区域相邻的第三车道中一个或多个车辆的存在,以及几何道路