
基于车辆运动模型的无人车辆野外路径规划方法.pdf

霞英****娘子


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车辆运动模型的无人车辆野外路径规划方法.pdf
本发明涉及无人驾驶技术领域,尤其是一种基于车辆运动模型的无人车辆野外路径规划方法。包括以下步骤:一、建立环境三维地图;二、定义车辆行驶模型;三、车辆按控制周期行驶;四、输出规划方案。按照本发明进行路径规划后,能够顺利躲避障碍,满足车轮转向角速度限制,使用尽量少的路径完成了规划要求,而且每段路径都给出了详细的转弯角度、行驶方向,为路径跟踪提供了指导,融合了优化算法、车辆运动学多方面的信息,为解决现有的路径规划存在的问题做了一个新的探索。

用于无人驾驶车辆高速运动规划的车辆动力学模型建模方法.pdf
本发明提供了一种用于无人驾驶车辆高速运动规划的车辆动力学模型建模方法,通过对车辆动力学模型合理的简化和恰当的计算方法,对车辆高速工况下的运动状态进行准确估计。先建立考虑车辆横摆运动和侧向运动的二自由度车辆模型,再由前轮转角、侧偏角、质心侧偏角之间的几何关系、轮胎侧向力和侧向加速度的力学关系建立系统的动力学方程,最后采用合理的数值计算方法对建立的车辆动力学微分方程进行求解,得到车辆稳态运动时的状态参数,如曲率半径、横摆角速度和轮胎侧向力等参数,从而为车辆的路径规划提供依据。通过对实车试验和仿真结果对比,该模

基于学习的无人驾驶车辆模型预测路径跟踪控制研究.docx
基于学习的无人驾驶车辆模型预测路径跟踪控制研究1.内容概览本研究旨在解决基于学习的无人驾驶车辆模型预测路径跟踪控制问题。我们对现有的无人驾驶车辆技术进行了深入的研究和分析,总结了其主要特点和发展趋势。我们提出了一种基于学习的无人驾驶车辆模型预测路径跟踪控制方法,该方法通过训练一个深度学习模型来实现对车辆行驶路径的预测。我们在实际环境中对该方法进行了验证和实验,结果表明该方法具有较高的准确性和稳定性,为无人驾驶车辆的发展提供了有力的支持。1.1背景与意义随着科技的不断发展,无人驾驶车辆技术已经成为了当今汽车
车辆与无人机协同巡检的路径规划方法及系统.pdf
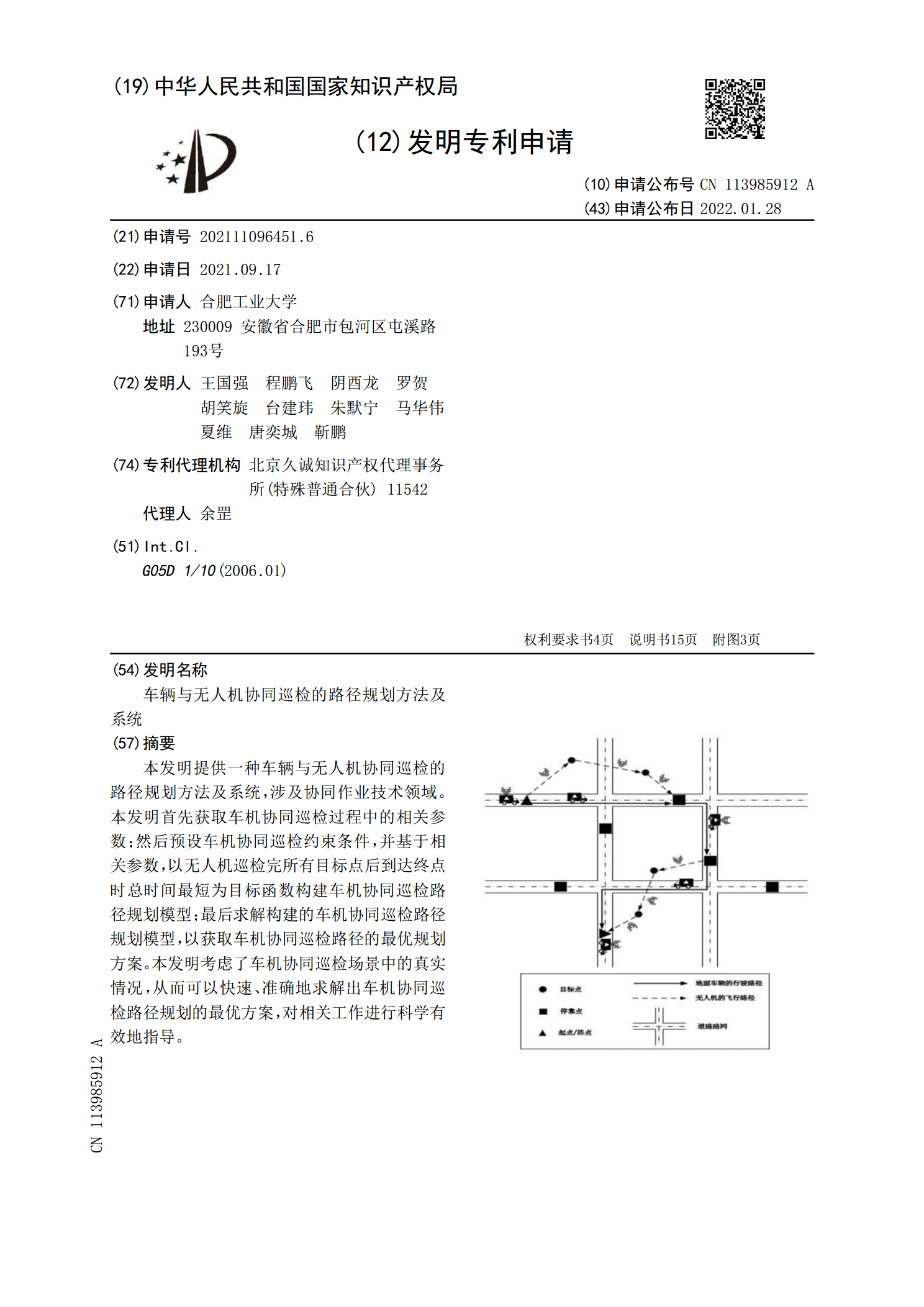
本发明提供一种车辆与无人机协同巡检的路径规划方法及系统,涉及协同作业技术领域。本发明首先获取车机协同巡检过程中的相关参数;然后预设车机协同巡检约束条件,并基于相关参数,以无人机巡检完所有目标点后到达终点时总时间最短为目标函数构建车机协同巡检路径规划模型;最后求解构建的车机协同巡检路径规划模型,以获取车机协同巡检路径的最优规划方案。本发明考虑了车机协同巡检场景中的真实情况,从而可以快速、准确地求解出车机协同巡检路径规划的最优方案,对相关工作进行科学有效地指导。

基于MCPDDPG的智能车辆路径规划方法及应用.docx
基于MCPDDPG的智能车辆路径规划方法及应用智能车辆路径规划在交通管理和智能交通系统中起着重要的作用,能够为车辆提供更加安全和高效的行驶路径。随着深度强化学习的发展,基于深度强化学习的路径规划方法得到了广泛的研究和应用。本文将介绍一种基于MCPDDPG(Multi-CameraParallelDeepDeterministicPolicyGradient)的智能车辆路径规划方法,并讨论其在实际应用中的性能。首先,我们介绍MCPDDPG算法的基本原理。MCPDDPG是一种基于深度强化学习的路径规划方法,它