
一种用于微创手术机器人的丝传动四自由度手术器械.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于微创手术机器人的丝传动四自由度手术器械.pdf
本发明公开了一种用于微创手术机器人的丝传动四自由度手术器械,手术器械包括三部分:手术器械的动力接口部分、手术器械的主体连杆部分和手术器械的末端执行器部分。主体连杆部分末端具有一个手腕自转自由度,手术器械的末端执行器部分包含手指开合自由度,手指偏转自由度和手腕俯仰自由度,连杆部分一端与动力装置相连,一端通过手腕轴与末端执行器相连,手腕的自转自由度是通过一对锥齿轮啮合来把轴向转动转换为手腕转动。本发明采用丝实现远距离传动,消除回差,保证传动可靠,同时通过锥齿轮传动实现手术器械手腕自转,减小了手术器械与套管间的

一种微创外科丝传动、四自由度手术工具.pdf
本发明公开了一种微创外科丝传动、四自由度手术工具,它包括工具连接杆,工具连接杆一端与工具末端相连,工具末端包括工具主体,在工具主体的后端连接有主体驱动轮,工具连接杆前端安装有后部轴销,在后部轴销两侧分别安装有两个后部传动轮并且在其中间通过主体驱动轮与工具末端的工具主体相连,在工具主体的中部安装有两个其上装有中间传动轮的中间传动轮轴,在工具主体前端安装有前部轴销,前部轴销通过安装在其上的两个钳体驱动轮与工具钳体相连;每一钳体驱动轮与一个前端钢丝绳的一端固定相连并将前端钢丝绳分为两部分,一部分经过一
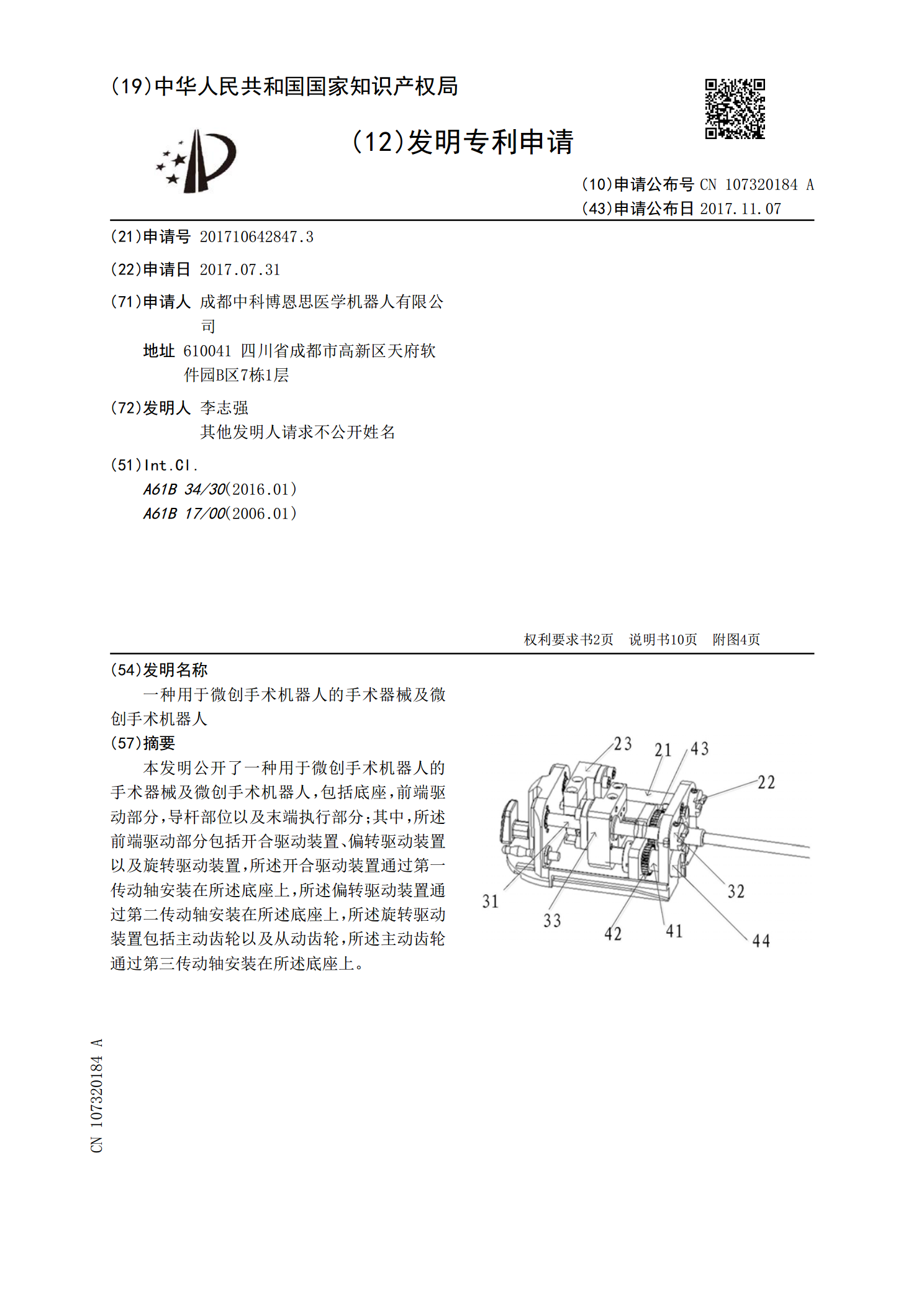
一种用于微创手术机器人的手术器械及微创手术机器人.pdf
本发明公开了一种用于微创手术机器人的手术器械及微创手术机器人,包括底座,前端驱动部分,导杆部位以及末端执行部分;其中,所述前端驱动部分包括开合驱动装置、偏转驱动装置以及旋转驱动装置,所述开合驱动装置通过第一传动轴安装在所述底座上,所述偏转驱动装置通过第二传动轴安装在所述底座上,所述旋转驱动装置包括主动齿轮以及从动齿轮,所述主动齿轮通过第三传动轴安装在所述底座上。
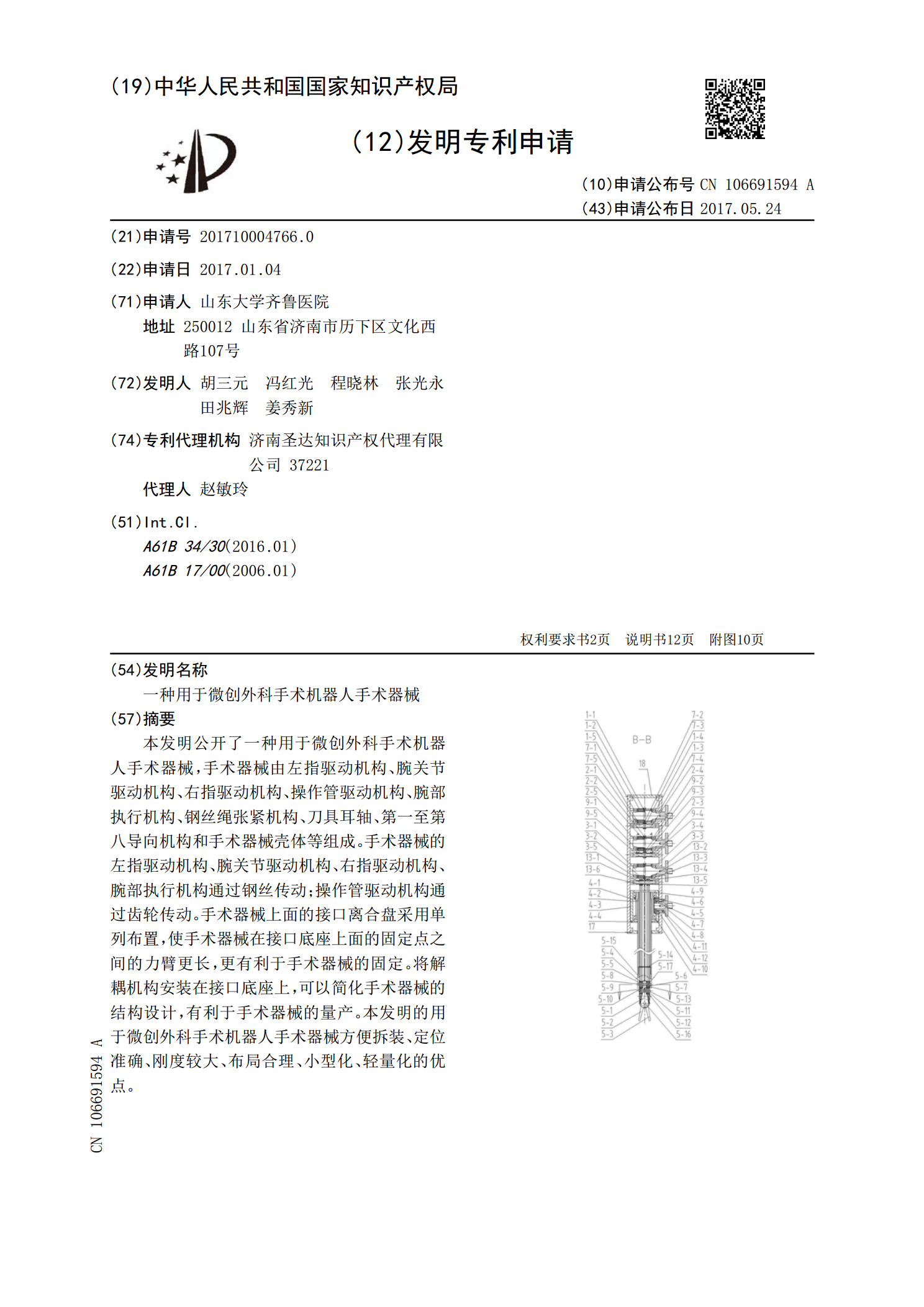
一种用于微创外科手术机器人手术器械.pdf
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创
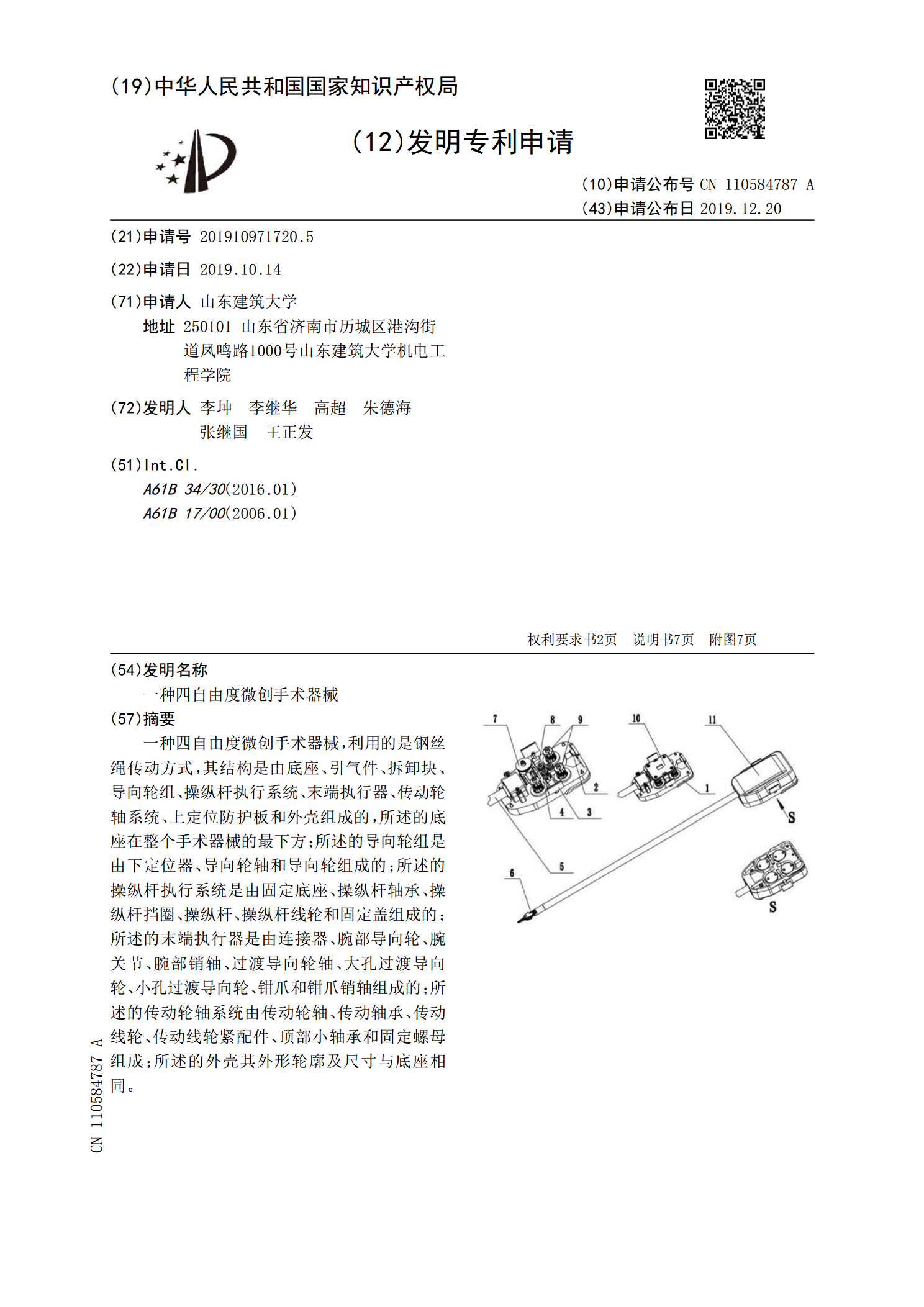
一种四自由度微创手术器械.pdf
一种四自由度微创手术器械,利用的是钢丝绳传动方式,其结构是由底座、引气件、拆卸块、导向轮组、操纵杆执行系统、末端执行器、传动轮轴系统、上定位防护板和外壳组成的,所述的底座在整个手术器械的最下方;所述的导向轮组是由下定位器、导向轮轴和导向轮组成的;所述的操纵杆执行系统是由固定底座、操纵杆轴承、操纵杆挡圈、操纵杆、操纵杆线轮和固定盖组成的;所述的末端执行器是由连接器、腕部导向轮、腕关节、腕部销轴、过渡导向轮轴、大孔过渡导向轮、小孔过渡导向轮、钳爪和钳爪销轴组成的;所述的传动轮轴系统由传动轮轴、传动轴承、传动线