
一种微创外科丝传动、四自由度手术工具.pdf

书生****瑞梦


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种微创外科丝传动、四自由度手术工具.pdf
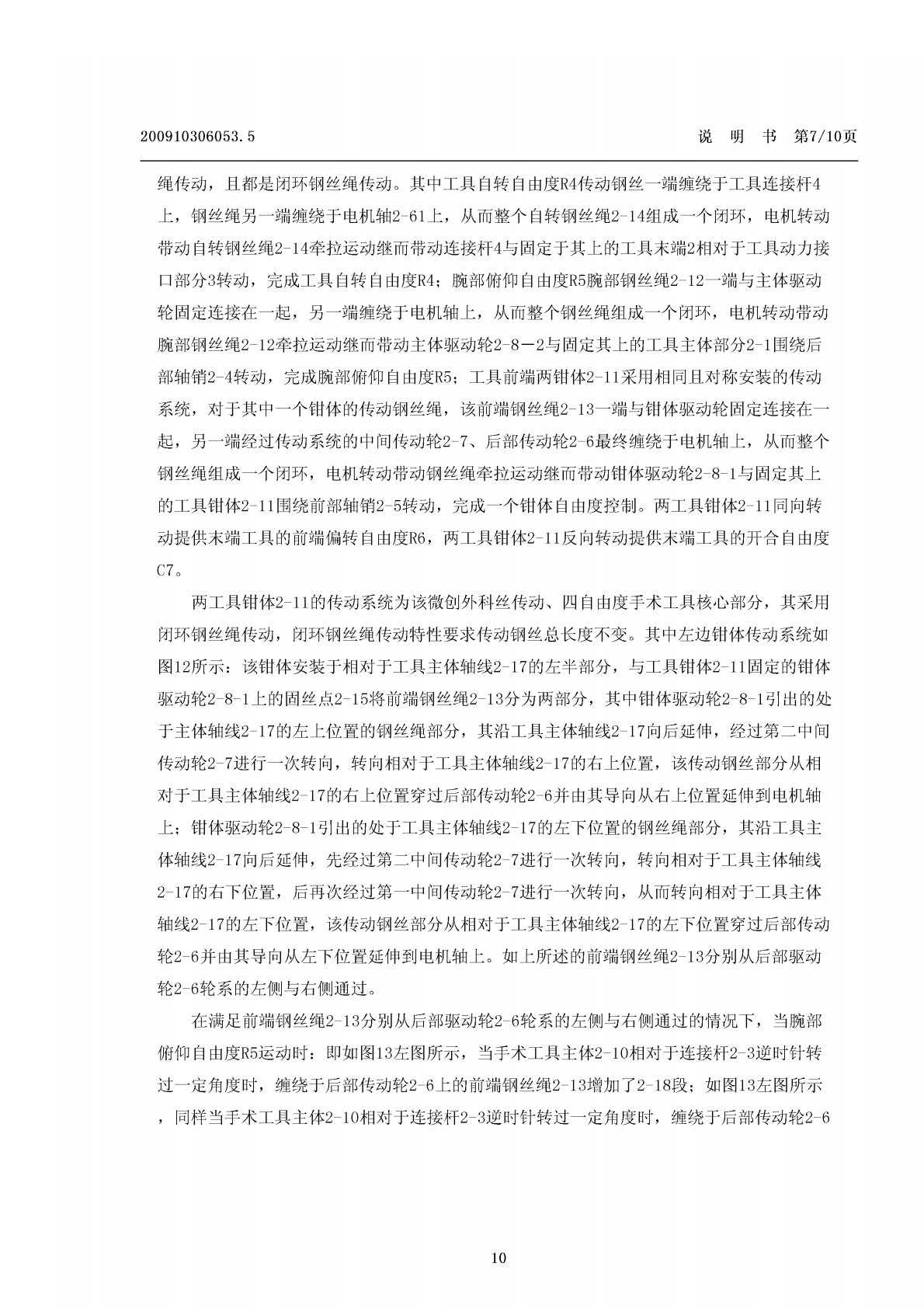
本发明公开了一种微创外科丝传动、四自由度手术工具,它包括工具连接杆,工具连接杆一端与工具末端相连,工具末端包括工具主体,在工具主体的后端连接有主体驱动轮,工具连接杆前端安装有后部轴销,在后部轴销两侧分别安装有两个后部传动轮并且在其中间通过主体驱动轮与工具末端的工具主体相连,在工具主体的中部安装有两个其上装有中间传动轮的中间传动轮轴,在工具主体前端安装有前部轴销,前部轴销通过安装在其上的两个钳体驱动轮与工具钳体相连;每一钳体驱动轮与一个前端钢丝绳的一端固定相连并将前端钢丝绳分为两部分,一部分经过一

一种用于微创手术机器人的丝传动四自由度手术器械.pdf
本发明公开了一种用于微创手术机器人的丝传动四自由度手术器械,手术器械包括三部分:手术器械的动力接口部分、手术器械的主体连杆部分和手术器械的末端执行器部分。主体连杆部分末端具有一个手腕自转自由度,手术器械的末端执行器部分包含手指开合自由度,手指偏转自由度和手腕俯仰自由度,连杆部分一端与动力装置相连,一端通过手腕轴与末端执行器相连,手腕的自转自由度是通过一对锥齿轮啮合来把轴向转动转换为手腕转动。本发明采用丝实现远距离传动,消除回差,保证传动可靠,同时通过锥齿轮传动实现手术器械手腕自转,减小了手术器械与套管间的

一种具有力传感功能的丝传动三自由度手术钻工具.pdf
本发明公开了一种具有力传感功能的丝传动三自由度手术钻工具,它包括末端执行器、偏转机构、俯仰机构和自转机构。末端执行器由外科手术钻、六维力传感器、钻侧中间件和偏转侧中间件组成。偏转机构由偏转轴和轴承组成。俯仰机构由俯仰轴、支撑架、导向轮、导向轮支撑轴和轴承组成。自转机构由俯仰支撑架、碳纤维管和自转旋转轴组成。通过丝带动偏转轴、俯仰轴和自转轴转动使手术钻具有偏转、俯仰和自转三个自由度。本发明具有结构简单,主从映射直观,传动精度高和具有力传感功能等优点。
一种丝传动微创手术机器人轨迹检测方法.pdf
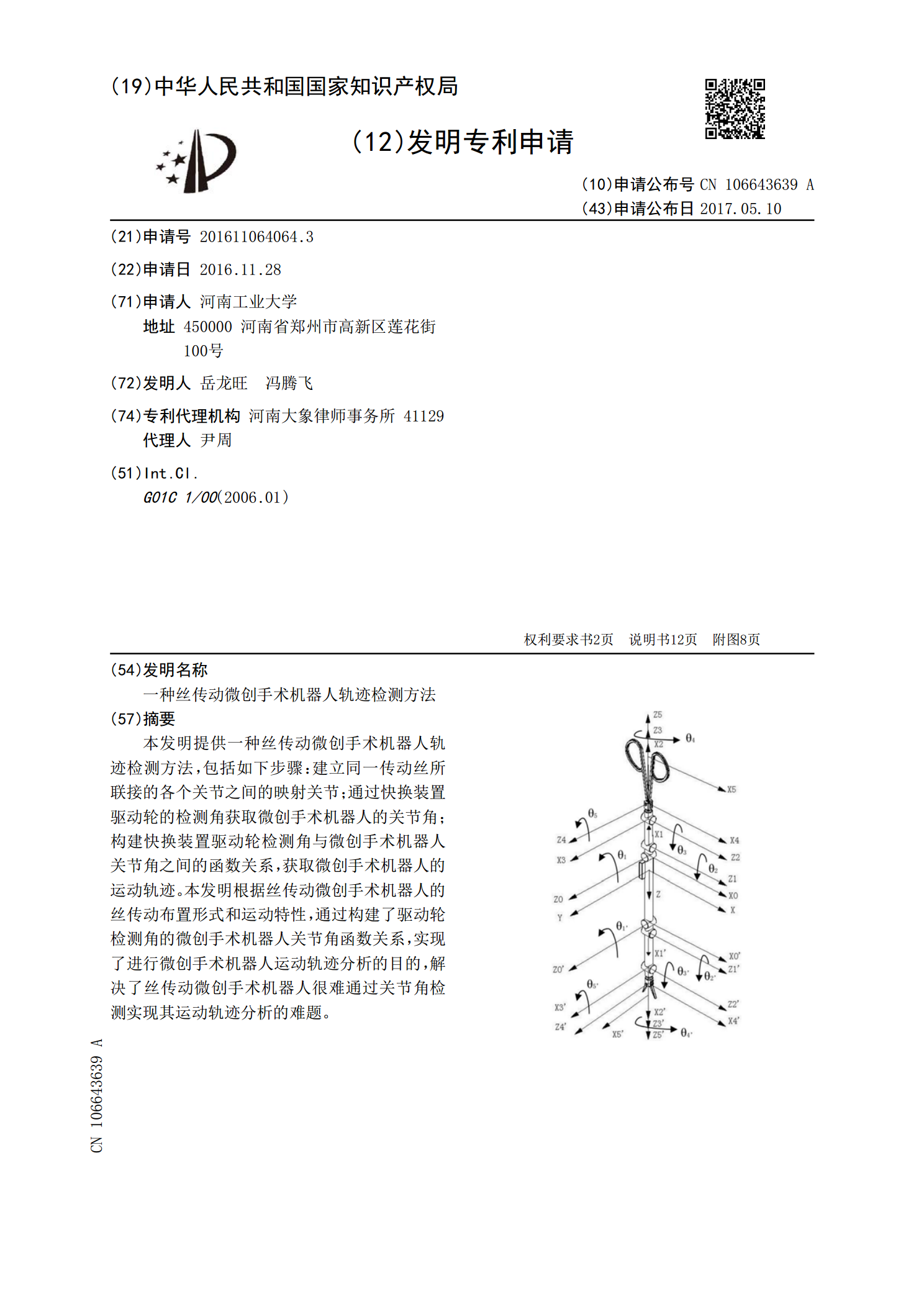
本发明提供一种丝传动微创手术机器人轨迹检测方法,包括如下步骤:建立同一传动丝所联接的各个关节之间的映射关节;通过快换装置驱动轮的检测角获取微创手术机器人的关节角;构建快换装置驱动轮检测角与微创手术机器人关节角之间的函数关系,获取微创手术机器人的运动轨迹。本发明根据丝传动微创手术机器人的丝传动布置形式和运动特性,通过构建了驱动轮检测角的微创手术机器人关节角函数关系,实现了进行微创手术机器人运动轨迹分析的目的,解决了丝传动微创手术机器人很难通过关节角检测实现其运动轨迹分析的难题。
一种四自由度微创手术器械.pdf
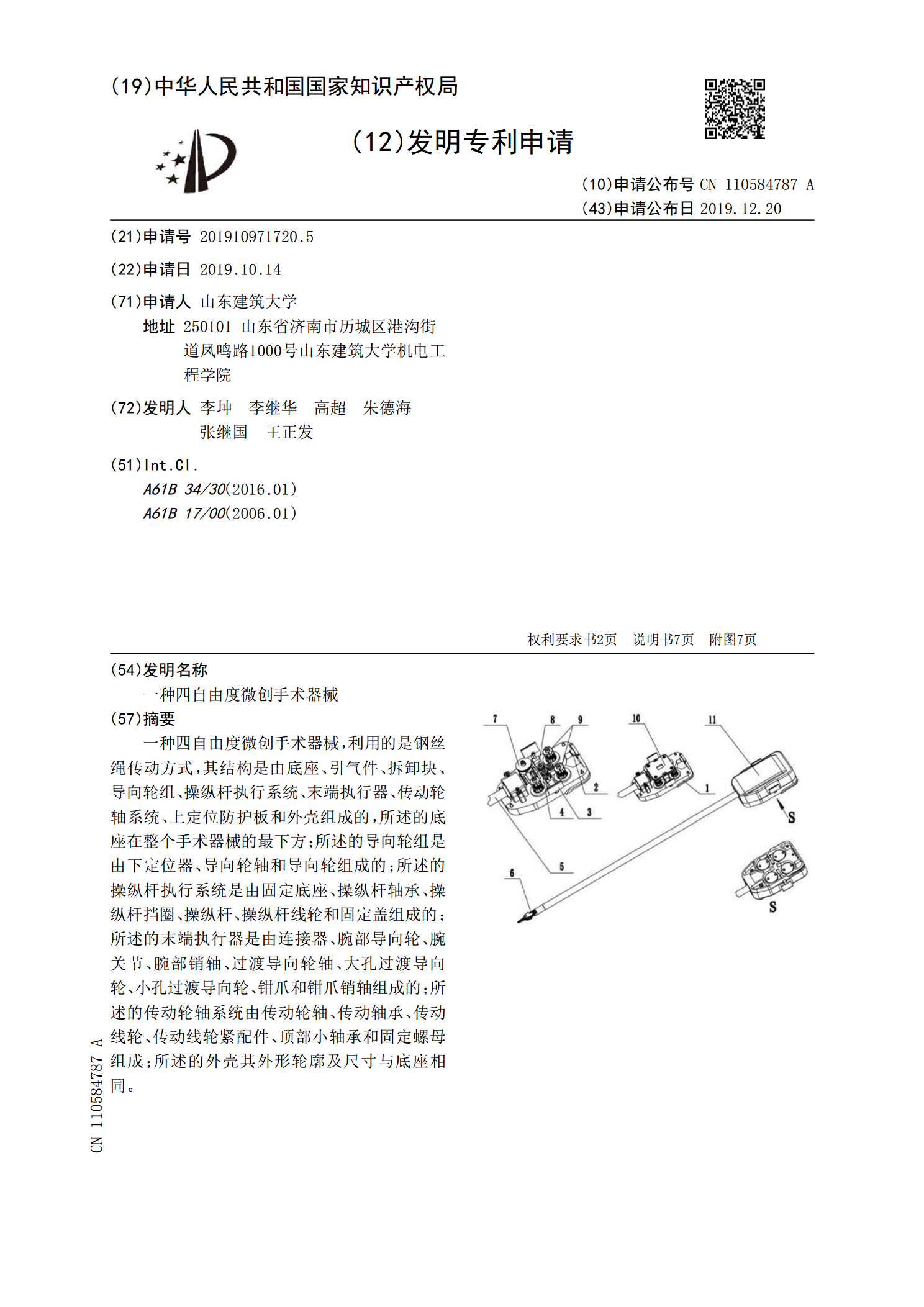
一种四自由度微创手术器械,利用的是钢丝绳传动方式,其结构是由底座、引气件、拆卸块、导向轮组、操纵杆执行系统、末端执行器、传动轮轴系统、上定位防护板和外壳组成的,所述的底座在整个手术器械的最下方;所述的导向轮组是由下定位器、导向轮轴和导向轮组成的;所述的操纵杆执行系统是由固定底座、操纵杆轴承、操纵杆挡圈、操纵杆、操纵杆线轮和固定盖组成的;所述的末端执行器是由连接器、腕部导向轮、腕关节、腕部销轴、过渡导向轮轴、大孔过渡导向轮、小孔过渡导向轮、钳爪和钳爪销轴组成的;所述的传动轮轴系统由传动轮轴、传动轴承、传动线