
一种用于微创手术机器人的手术器械及微创手术机器人.pdf

傲丝****账号

1/10

2/10

3/10
4/10

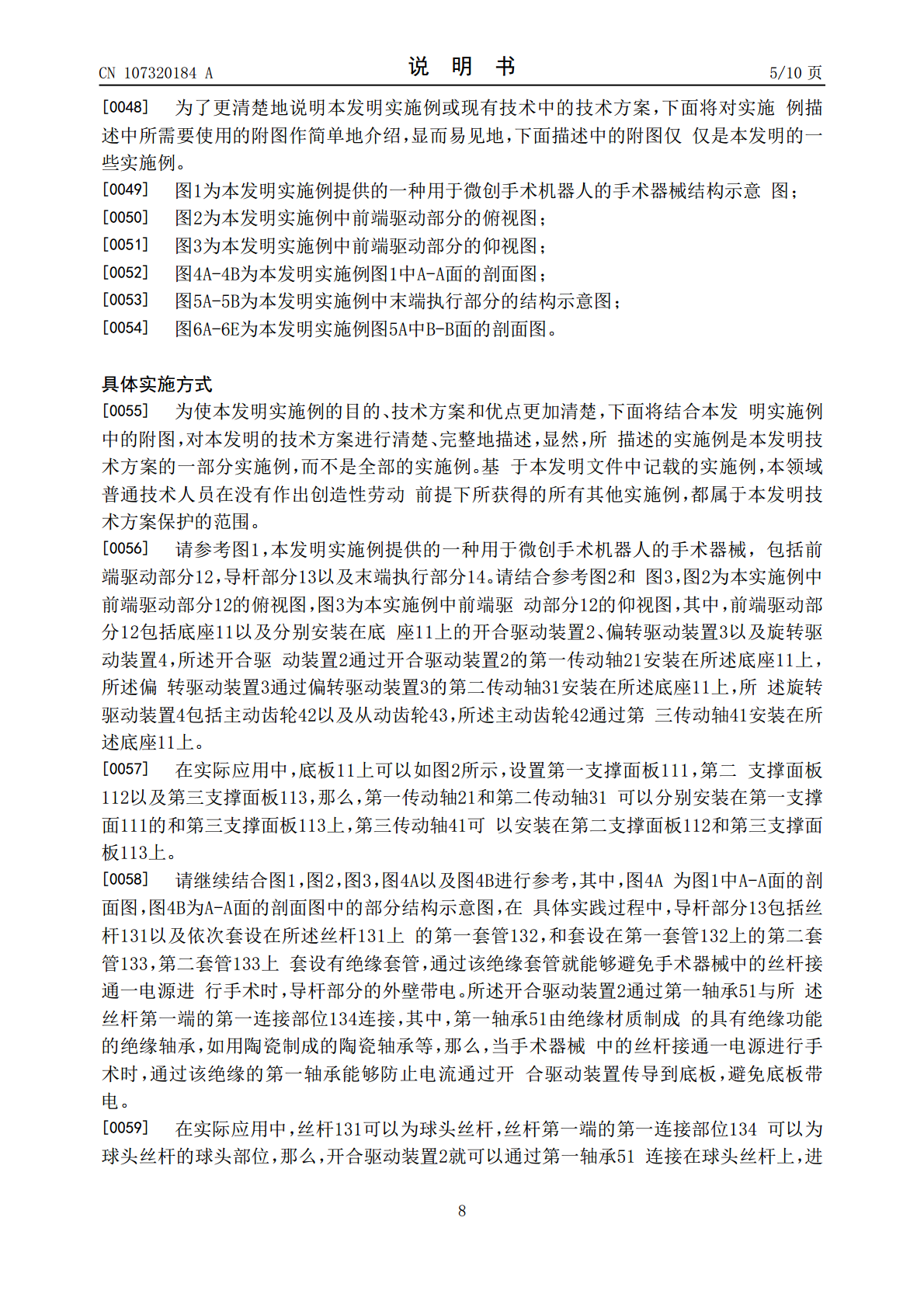
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于微创手术机器人的手术器械及微创手术机器人.pdf
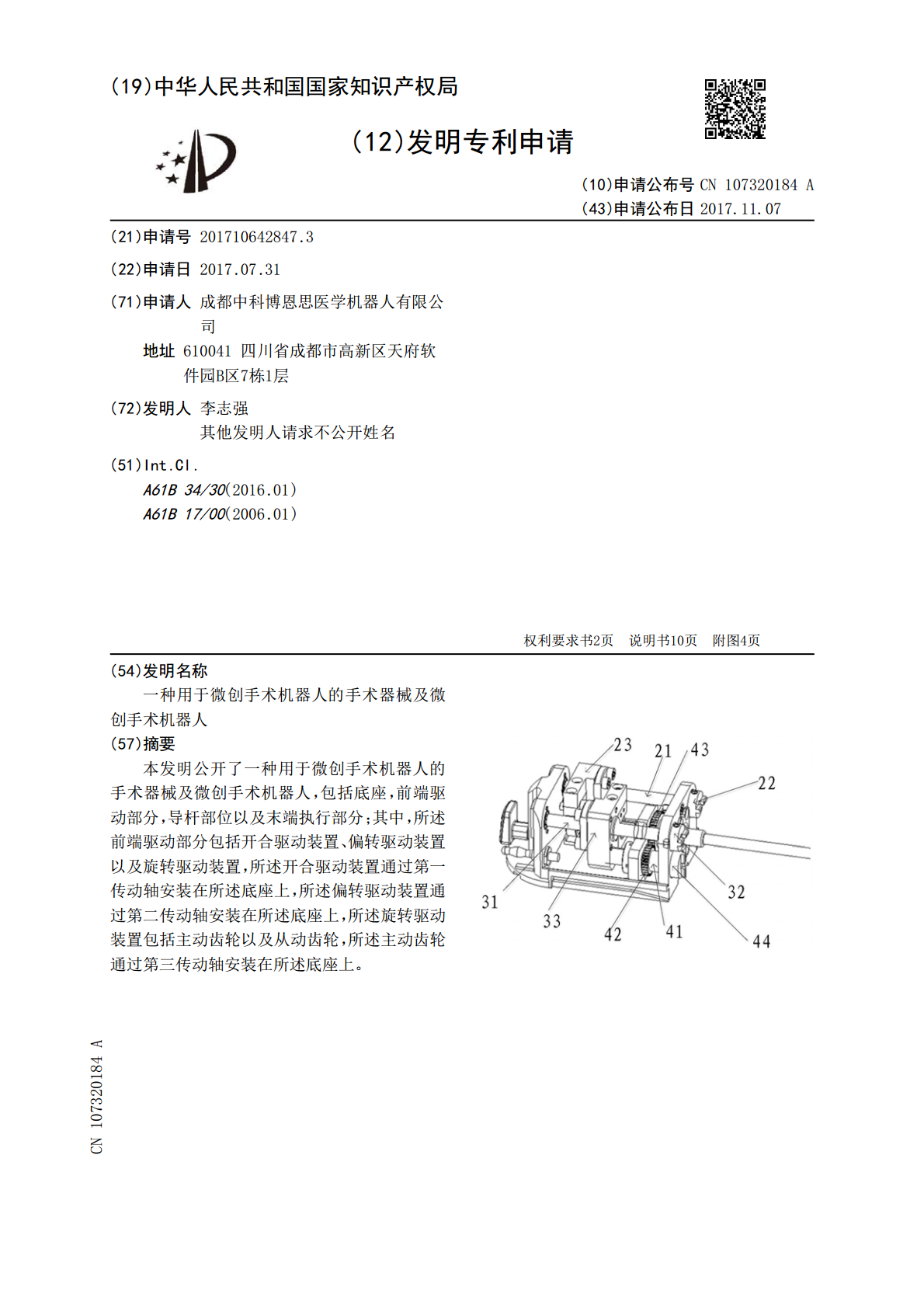
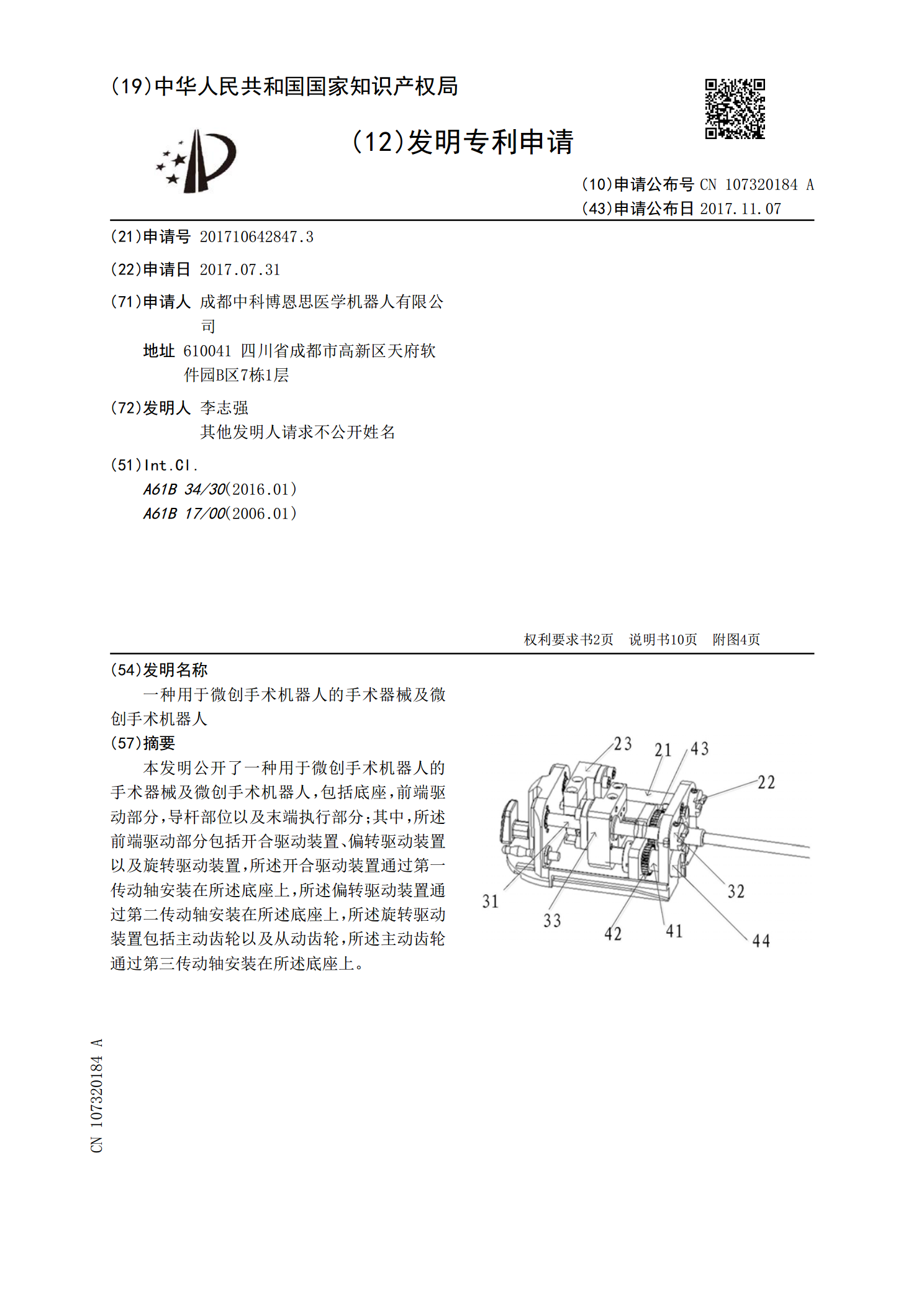
本发明公开了一种用于微创手术机器人的手术器械及微创手术机器人,包括底座,前端驱动部分,导杆部位以及末端执行部分;其中,所述前端驱动部分包括开合驱动装置、偏转驱动装置以及旋转驱动装置,所述开合驱动装置通过第一传动轴安装在所述底座上,所述偏转驱动装置通过第二传动轴安装在所述底座上,所述旋转驱动装置包括主动齿轮以及从动齿轮,所述主动齿轮通过第三传动轴安装在所述底座上。
一种用于微创外科手术机器人手术器械.pdf
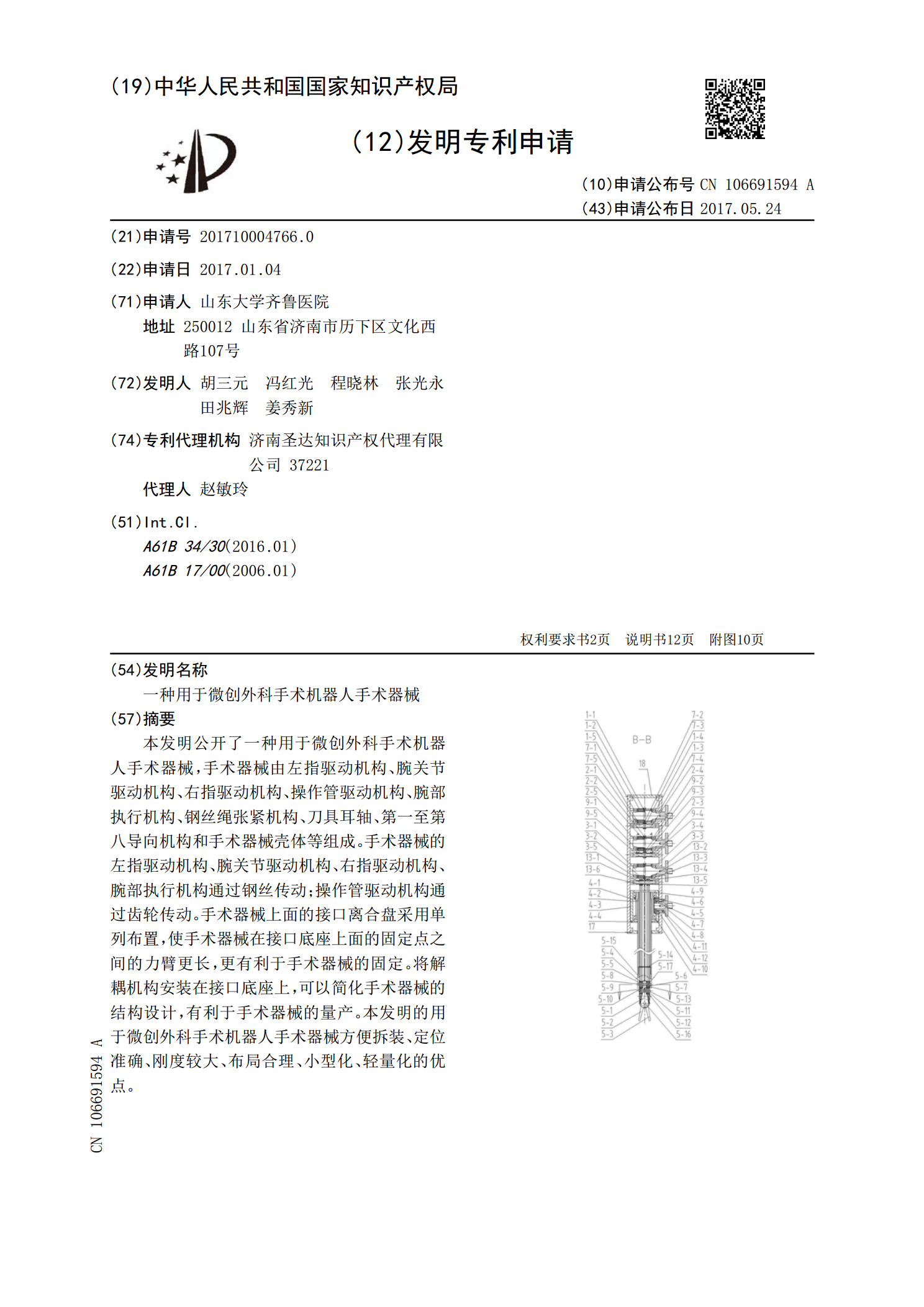
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创
腹腔微创手术机器人用夹钳式手术器械.pdf
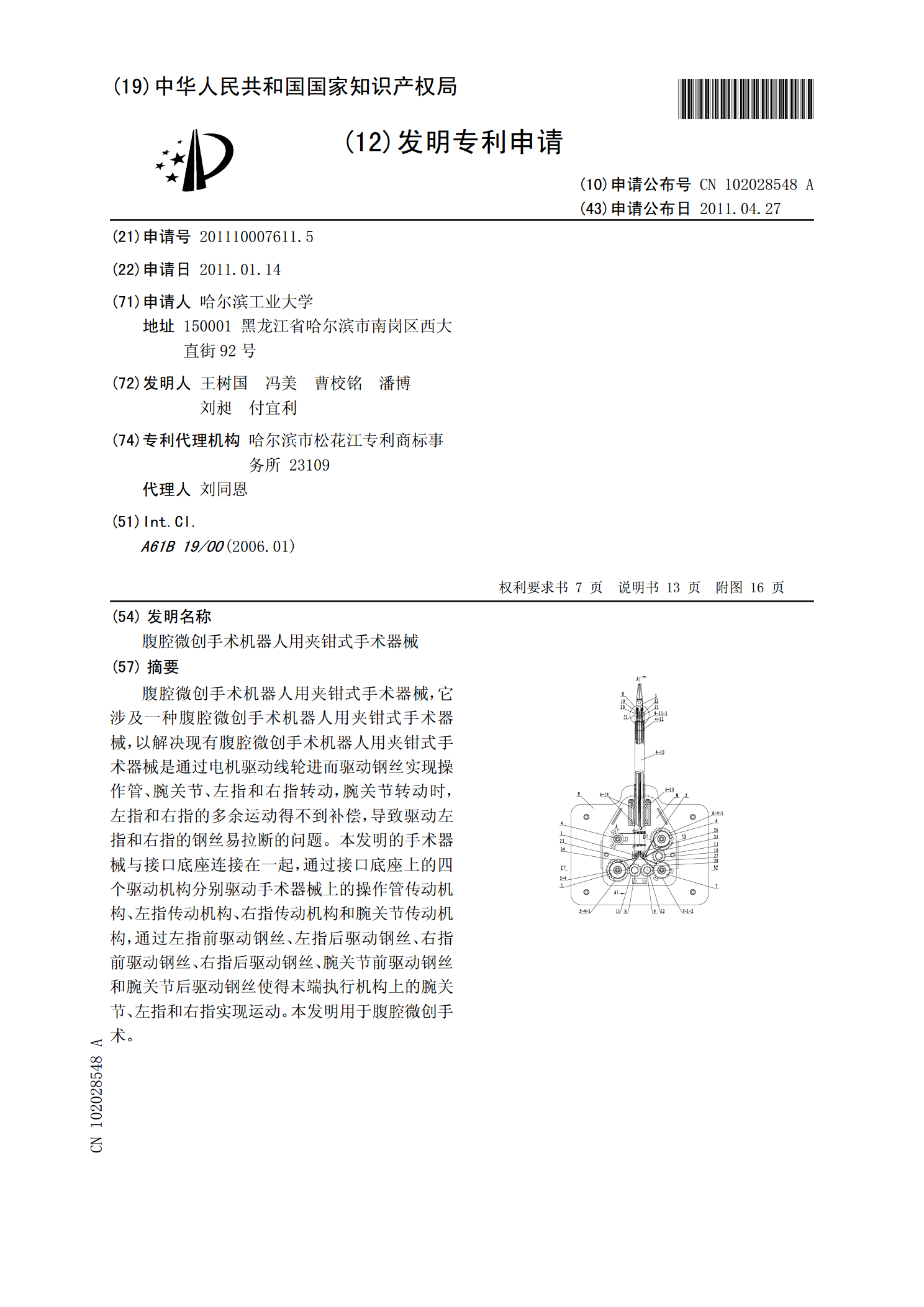
腹腔微创手术机器人用夹钳式手术器械,它涉及一种腹腔微创手术机器人用夹钳式手术器械,以解决现有腹腔微创手术机器人用夹钳式手术器械是通过电机驱动线轮进而驱动钢丝实现操作管、腕关节、左指和右指转动,腕关节转动时,左指和右指的多余运动得不到补偿,导致驱动左指和右指的钢丝易拉断的问题。本发明的手术器械与接口底座连接在一起,通过接口底座上的四个驱动机构分别驱动手术器械上的操作管传动机构、左指传动机构、右指传动机构和腕关节传动机构,通过左指前驱动钢丝、左指后驱动钢丝、右指前驱动钢丝、右指后驱动钢丝、腕关节前驱动钢丝和腕
机器人手术器械臂及适用于各种孔数的微创手术机器人.pdf
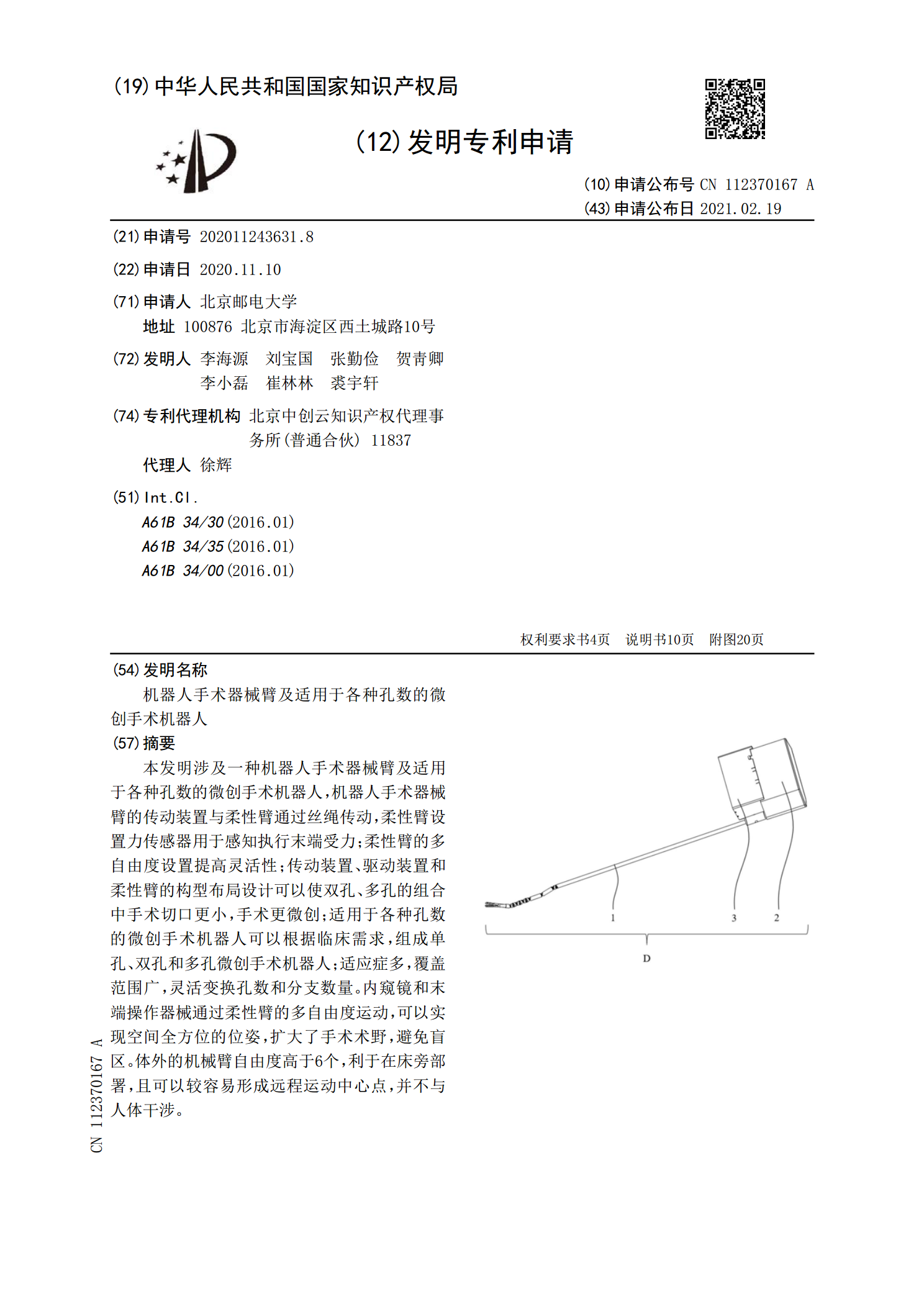
本发明涉及一种机器人手术器械臂及适用于各种孔数的微创手术机器人,机器人手术器械臂的传动装置与柔性臂通过丝绳传动,柔性臂设置力传感器用于感知执行末端受力;柔性臂的多自由度设置提高灵活性;传动装置、驱动装置和柔性臂的构型布局设计可以使双孔、多孔的组合中手术切口更小,手术更微创;适用于各种孔数的微创手术机器人可以根据临床需求,组成单孔、双孔和多孔微创手术机器人;适应症多,覆盖范围广,灵活变换孔数和分支数量。内窥镜和末端操作器械通过柔性臂的多自由度运动,可以实现空间全方位的位姿,扩大了手术术野,避免盲区。体外的机

微创机器人手术器械研究进展.docx
微创机器人手术器械研究进展微创机器人手术器械研究进展摘要:微创手术是现代医疗技术的重要成果之一,减少了手术创伤和康复时间,提高了手术的精确性和安全性。近年来,微创机器人手术器械的研究和应用取得了显著的进展。本文主要概述了微创机器人手术器械的发展历程,重点介绍了目前研究的主要方向和存在的挑战,并展望了未来的发展趋势。第一部分:引言微创手术是一种通过小切口和远程操作的手术技术。相比传统开放手术,微创手术有着更小的创伤和更快的恢复时间,同时减少了手术并发症的风险。随着医疗技术的不断发展,微创手术在各个领域得到广