
一种履带机器人移动平台.pdf

星菱****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种履带机器人移动平台.pdf
本发明公开了一种履带机器人移动平台,通过控制模块根据监测模块的数据信号控制主动轮系与从动轮系带动车体运行,且能够进行远程传输,具有一定的远程遥控功能,电源管理模块用于为车体的移动提供电力驱动;通过设置外设接口电路板,诸多常见传感器直接插上即可使用,实现外扩传感器,数据获取简单。本发明结构简单,紧凑、适应性能强,运行平稳,适用于恶劣环境中作业;同时采用分层模块化安装结构,安装拆卸方便;且便于实际教学使用,使学生充分的了解履带机器人移动平台的工作原理及各机构部件的性能,提高学生在履带机器人移动平台操作使用方面

双履带机器人移动平台.pdf
双履带机器人移动平台,包括移动车体和对称设在移动车体两侧的履带机构,移动车体内设有向履带机构提供动力的动力源,每个履带机构均包括主动链轮、从动链轮、连杆机构和履带条;连杆机构包括若干个连杆单元和弹簧,每个连杆单元由销钉、第一连杆、第二连杆和第三连杆组成,且每个连杆单元中,第一连杆的上端安装有托带轮,第二连杆的下端安装有负重轮,第三连杆的首端、第一连杆的下端以及第二连杆的上端复合铰接在销钉上,第三连杆的末端与相邻设置的连杆单元中的销钉通过弹簧连接;与主动链轮相邻设置的连杆单元中的第三连杆的末端与另外设置的销
一种履带可变形机器人移动平台.pdf
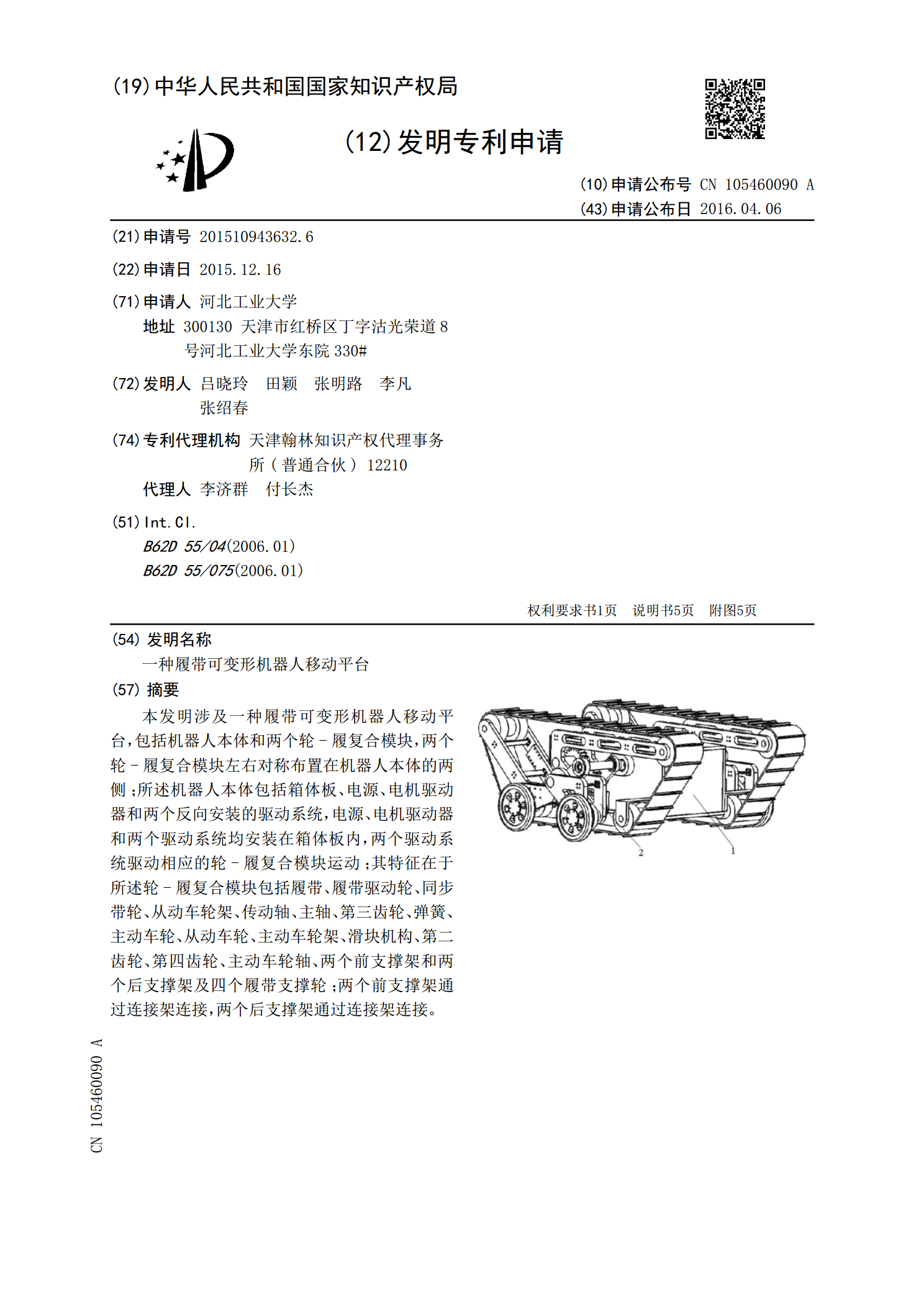
本发明涉及一种履带可变形机器人移动平台,包括机器人本体和两个轮-履复合模块,两个轮-履复合模块左右对称布置在机器人本体的两侧;所述机器人本体包括箱体板、电源、电机驱动器和两个反向安装的驱动系统,电源、电机驱动器和两个驱动系统均安装在箱体板内,两个驱动系统驱动相应的轮-履复合模块运动;其特征在于所述轮-履复合模块包括履带、履带驱动轮、同步带轮、从动车轮架、传动轴、主轴、第三齿轮、弹簧、主动车轮、从动车轮、主动车轮架、滑块机构、第二齿轮、第四齿轮、主动车轮轴、两个前支撑架和两个后支撑架及四个履带支撑轮;两个前

履带可变形机器人移动平台.pdf
本发明涉及履带可变形机器人移动平台,其特征在于该移动平台包括车体模块、两个等腰梯形轮-履模块、驱动后轮模块和辅助底轮模块;两个等腰梯形轮-履模块左右对称布置在车体模块的两侧,辅助底轮模块安装在车体模块的底部,驱动后轮模块位于车体模块的后部;所述车体模块包括电机驱动器、壳体及两个履带驱动系统和两个后轮驱动系统,电机驱动器安装在车体模块的中心,两个履带驱动系统和两个后轮驱动系统均以电机驱动器所在直线为轴平行对称设置,履带驱动系统和后轮驱动系统反向安装在壳体内,壳体底部与辅助底轮模块连接;每个履带驱动系统包括伺

一种欠驱动履带式机器人移动平台.pdf
本发明涉及一种欠驱动履带式机器人移动平台,其主要技术特点是:在机器人本体机构的前端安装差动齿轮机构并与驱动电机相连接,该差动齿轮机构作为机器人平台动力传递的主要机构;在机器人本体两侧对称设有欠驱动变形履带机构并与差动齿轮机构相连接,该欠驱动变形履带机构作为机器人与复杂路况的主要交互机构;在欠驱动变形履带机构的外侧安装有辅助越障机构,该辅助越障机构与欠驱动变形履带机构及差动齿轮机构相连接,该辅助越障机构作为机器人与复杂路况的次要交互机构。本发明采用欠驱动的变形履带式行走机构和辅助越障机构的组合模式,能够满足