
一种欠驱动履带式机器人移动平台.pdf

子安****吖吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种欠驱动履带式机器人移动平台.pdf
本发明涉及一种欠驱动履带式机器人移动平台,其主要技术特点是:在机器人本体机构的前端安装差动齿轮机构并与驱动电机相连接,该差动齿轮机构作为机器人平台动力传递的主要机构;在机器人本体两侧对称设有欠驱动变形履带机构并与差动齿轮机构相连接,该欠驱动变形履带机构作为机器人与复杂路况的主要交互机构;在欠驱动变形履带机构的外侧安装有辅助越障机构,该辅助越障机构与欠驱动变形履带机构及差动齿轮机构相连接,该辅助越障机构作为机器人与复杂路况的次要交互机构。本发明采用欠驱动的变形履带式行走机构和辅助越障机构的组合模式,能够满足
一种六足履带式建筑机器人移动平台.pdf
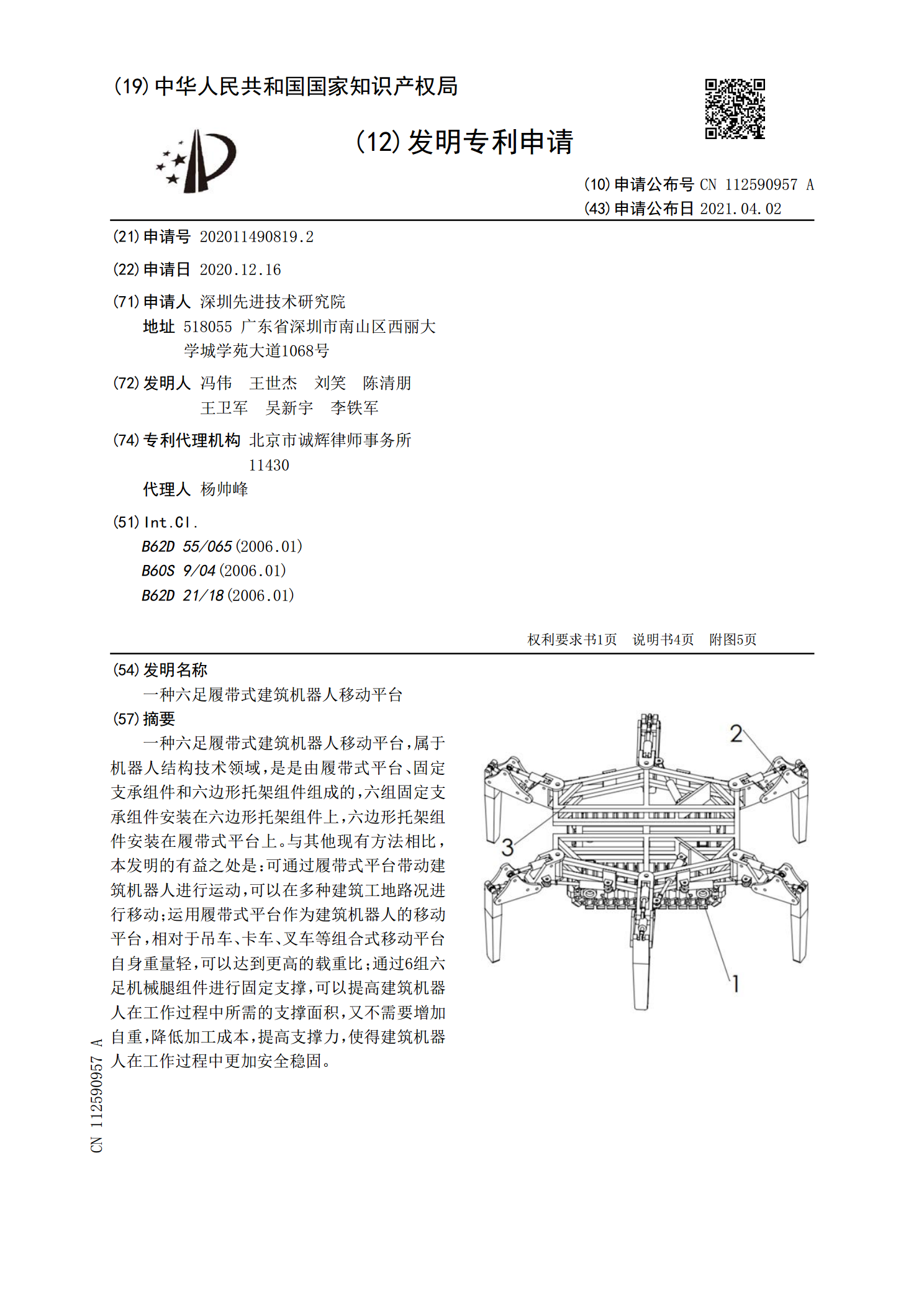
一种六足履带式建筑机器人移动平台,属于机器人结构技术领域,是是由履带式平台、固定支承组件和六边形托架组件组成的,六组固定支承组件安装在六边形托架组件上,六边形托架组件安装在履带式平台上。与其他现有方法相比,本发明的有益之处是:可通过履带式平台带动建筑机器人进行运动,可以在多种建筑工地路况进行移动;运用履带式平台作为建筑机器人的移动平台,相对于吊车、卡车、叉车等组合式移动平台自身重量轻,可以达到更高的载重比;通过6组六足机械腿组件进行固定支撑,可以提高建筑机器人在工作过程中所需的支撑面积,又不需要增加自重,

履带式移动机器人平台.pdf
本发明涉及履带式移动机器人平台,其包括机器人结构和控制系统,其特征在于机器人结构采用四履带式结构,四履带式结构包括四条履带、驱动机构、机体,两条履带分别固定的机体的两侧,另两条履带的动力端分别与前两条履带的一端同轴且是驱动机构的输出轴同轴,其从动端悬空,驱动机构固定机体内部且与四条履带的传动轴连接,驱动机构包括翻转臂转动机构、多台直流伺服电机,多台直流伺服电机驱动行星减速器A1、A2、和齿轮Z1、Z2、Z3,并通过2对伞齿带动翻转臂转动机构。本发明结构简单,能适应各种路况,行驶平稳。

具有形状自适应的履带式欠驱动机器人及传动方法.pdf
本发明涉及一种具有形状自适应的履带式欠驱动机器人及传动方法。目前使用的欠驱动机器人,一般采用的是轮式移动机构,由于轮式移动机器人形状改变功能较差,如爬坡、越障、跨壕沟等,不能够适应各种较恶劣的环境。本发明其组成包括:机体装置(1),所述的机体装置前端两侧面通过连接轴分别与2个驱动轮装置(9)连接,所述的驱动轮装置通过连接轴与履带架(8)的前端连接,所述的履带架后端通过连接轴与导向轮装置(7)连接,所述的导向轮装置通过连接轴与所述的机体装置连接,所述的驱动轮装置、所述的导向轮装置具有凹槽,所述的凹槽内安装有

一种小型双摆臂履带式移动机器人平台.pdf
本发明公开了一种小型双摆臂履带式移动机器人平台,包括:车体框架、行走驱动系统、行走轮系、摆臂驱动系统和摆臂轮系;其中,行走驱动系统和摆臂驱动系统安装在车体框架的底部,车体框架的两侧各安装有一套行走轮系,行走轮系的前进端设置有可调节的摆臂轮系;该机器人平台还包括摆臂传动轴、电路板组、电池组、传输天线、鱼眼镜头和声波感应器;摆臂传动轴和电路板组设置在车体框架的底部,摆臂传动轴用于连接摆臂驱动系统和摆臂轮系;电池组设置有两组,分别对称设置在车体框架的两侧;传输天线设置在车体框架上,鱼眼镜头和声波感应器设置在车体