
一种基于图像的室内大场景自动三维重建系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于图像的室内大场景自动三维重建系统.docx
一种基于图像的室内大场景自动三维重建系统一、引言随着室内设计和场所规划的不断发展,室内大场景自动三维重建技术越来越受到人们的关注。传统的室内大场景三维重建,往往需要人工测量和手动绘制。这种方法费时费力,且存在不确定性,很难达到高精度、高效率、高可靠性的标准。因此,建立一种快速、自动、精度高的室内大场景三维重建系统成为了当前学术和工业界的重大挑战之一。本文基于图像技术,介绍了一种基于图像的室内大场景自动三维重建系统。二、系统设计方案1.数据采集系统需要采集物品的图像数据作为输入。在数据采集过程中,需要为整个

基于单幅RGB图像的室内场景三维重建方法及系统.pdf
本发明涉及一种基于单幅RGB图像的室内场景三维重建方法及系统。所述重建方法包括:获取室内场景ScanNet数据集,并对所述ScanNet数据集进行划分,确定训练集以及测试集;利用随机样本一致性RANSAC算法,从所述训练集中重复提取平面,确定室内场景待重建平面;利用局部特征提取分支提取所述室内场景待重建平面的局部特征;所述局部特征提取分支用于提取局部特征;根据所述局部特征以及扩张残差DRN网络确定全局特征;根据所述局部特征以及所述全局特征构建基于单幅RGB图像的室内场景三维重建网络模型;根据所述室内场景三

一种基于RGB-D图像的室内场景三维重建方法.pdf
本发明公开了一种基于RGB‑D图像的室内场景三维重建方法,利用语义分割结果修复深度图像空洞,为三维重建提供物体轮廓与类别信息,根据先验知识获取到物体的形状和外观,从而为三维重建提供更加精确的数据。三维重建为语义分割提供三维空间信息,解决二维图像分割中存在的物体交叠、受光照影响等导致的误分割。使用多层次的相机位姿估计,稀疏的特征匹配提供粗略的估计位姿,再通过密集的几何、光度优化方法,得到精确相机位姿,为重建模型提供更加精确的相机位姿。在重建过程中,对每帧进行局部优化,同时加入关键帧机制,建立全局优化与闭环检

基于激光雷达的室内场景三维重建系统设计.docx
基于激光雷达的室内场景三维重建系统设计基于激光雷达的室内场景三维重建系统设计摘要:随着室内场景三维重建技术的逐渐成熟和发展,人们对于室内场景的三维重建需求越来越高。本文提出了一种基于激光雷达的室内场景三维重建系统的设计方案。该系统采用激光雷达实时扫描室内场景,并利用回波数据建立点云模型,在此基础上进行数据处理和优化,最终生成高质量的室内场景三维模型。实验证明,该系统具有较高的重建精度和稳定性,具备实际应用的潜力。关键词:室内场景重建、激光雷达、点云模型、数据处理、优化1.引言室内场景三维重建技术是计算机视
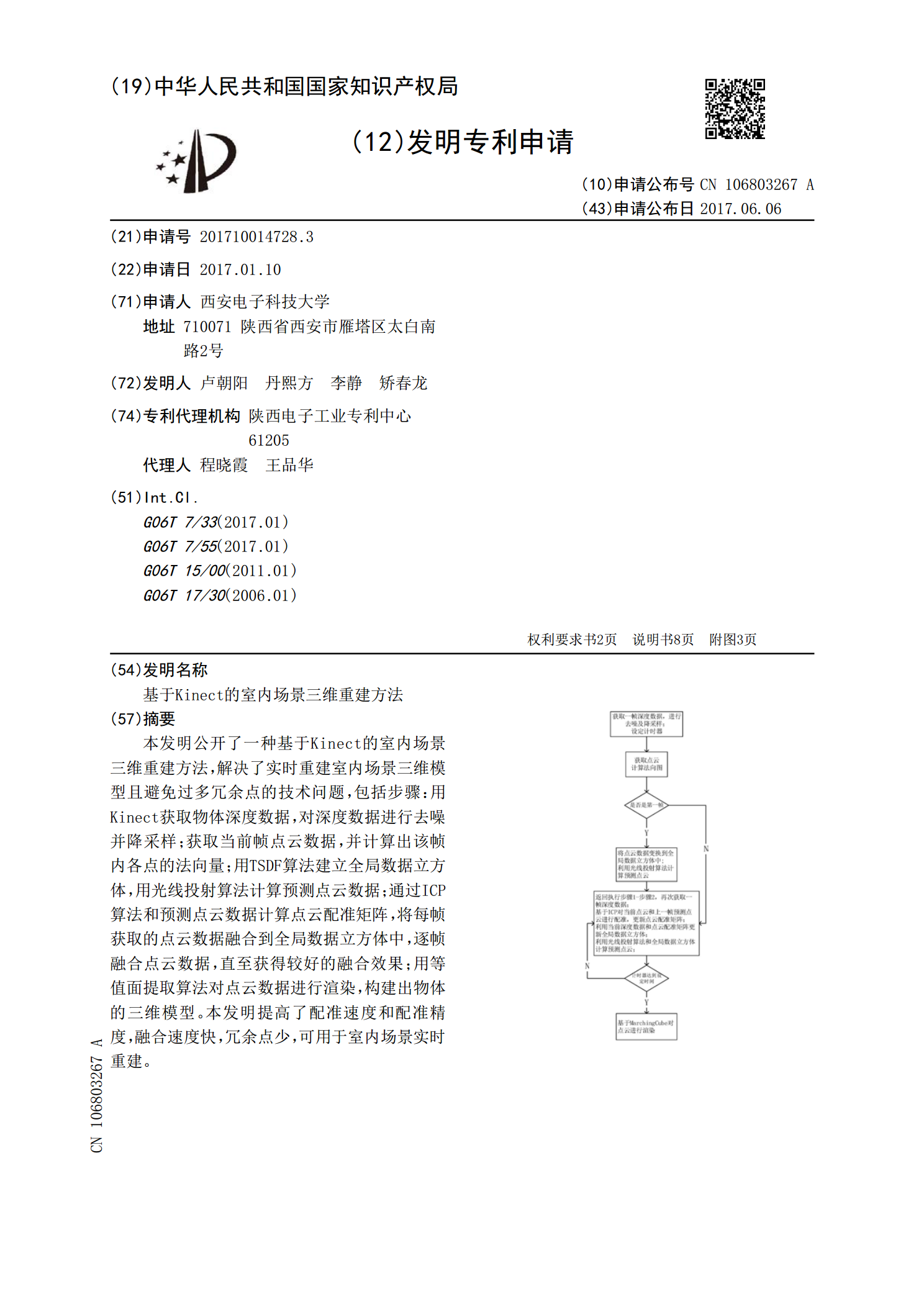
基于Kinect的室内场景三维重建方法.pdf
本发明公开了一种基于Kinect的室内场景三维重建方法,解决了实时重建室内场景三维模型且避免过多冗余点的技术问题,包括步骤:用Kinect获取物体深度数据,对深度数据进行去噪并降采样;获取当前帧点云数据,并计算出该帧内各点的法向量;用TSDF算法建立全局数据立方体,用光线投射算法计算预测点云数据;通过ICP算法和预测点云数据计算点云配准矩阵,将每帧获取的点云数据融合到全局数据立方体中,逐帧融合点云数据,直至获得较好的融合效果;用等值面提取算法对点云数据进行渲染,构建出物体的三维模型。本发明提高了配准速度和