
基于单幅RGB图像的室内场景三维重建方法及系统.pdf

一只****ng


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于单幅RGB图像的室内场景三维重建方法及系统.pdf
本发明涉及一种基于单幅RGB图像的室内场景三维重建方法及系统。所述重建方法包括:获取室内场景ScanNet数据集,并对所述ScanNet数据集进行划分,确定训练集以及测试集;利用随机样本一致性RANSAC算法,从所述训练集中重复提取平面,确定室内场景待重建平面;利用局部特征提取分支提取所述室内场景待重建平面的局部特征;所述局部特征提取分支用于提取局部特征;根据所述局部特征以及扩张残差DRN网络确定全局特征;根据所述局部特征以及所述全局特征构建基于单幅RGB图像的室内场景三维重建网络模型;根据所述室内场景三

一种基于RGB-D图像的室内场景三维重建方法.pdf
本发明公开了一种基于RGB‑D图像的室内场景三维重建方法,利用语义分割结果修复深度图像空洞,为三维重建提供物体轮廓与类别信息,根据先验知识获取到物体的形状和外观,从而为三维重建提供更加精确的数据。三维重建为语义分割提供三维空间信息,解决二维图像分割中存在的物体交叠、受光照影响等导致的误分割。使用多层次的相机位姿估计,稀疏的特征匹配提供粗略的估计位姿,再通过密集的几何、光度优化方法,得到精确相机位姿,为重建模型提供更加精确的相机位姿。在重建过程中,对每帧进行局部优化,同时加入关键帧机制,建立全局优化与闭环检

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告一、选题背景在计算机视觉领域中,室内场景的三维重建一直是一个非常重要的研究方向。对于机器人、虚拟现实、增强现实等领域来说,室内三维场景重建至关重要。而在室内三维场景重建的过程中,如何进行方法的选择是一个十分关键的问题,其中最重要的是选择何种方式进行场景的坐标系的建立。本文将研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计的方法,实现在场景重建时对室内场景的更加准确的建模。二、研究目的曼哈顿坐标系估计方法是一种流行的室内场景坐标系建立方法。通

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书任务概述本次任务旨在研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计方法,主要涉及室内场景分割、物体检测、深度估计、视差计算等多个领域,需要综合运用计算机视觉、深度学习等相关技术方法,完成对室内场景曼哈顿坐标系的估计任务。任务目标主要任务目标如下:1.设计室内场景曼哈顿坐标系的建立方法,以及相应的坐标系变换方法,实现对室内场景的精确估计。2.设计室内场景分割和物体检测算法,将场景中的每个物体分离出来,并对物体进行分类,确定物体的类别和位置。3
一种基于单幅图像的室内场景光照环境估计方法.pdf
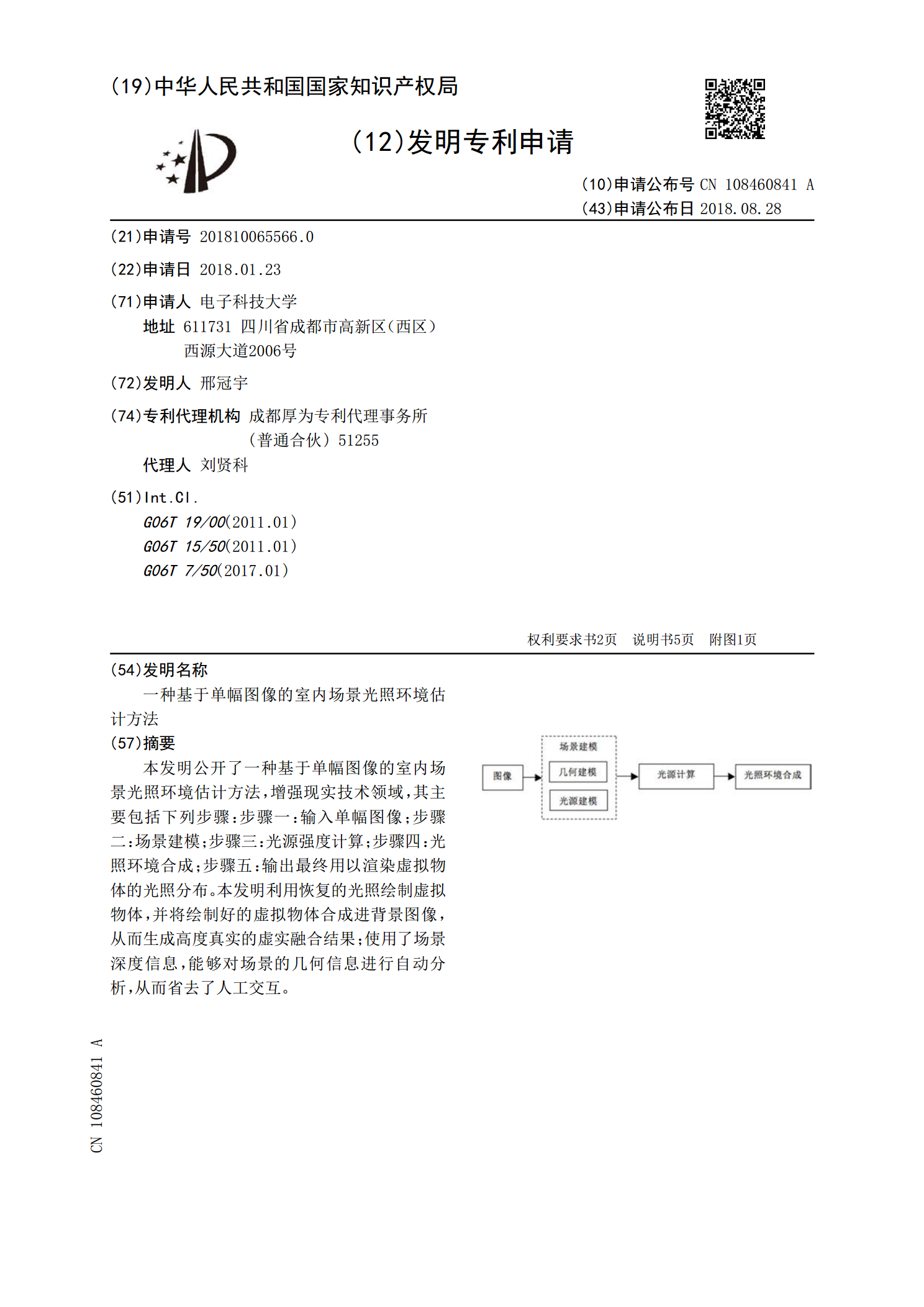
本发明公开了一种基于单幅图像的室内场景光照环境估计方法,增强现实技术领域,其主要包括下列步骤:步骤一:输入单幅图像;步骤二:场景建模;步骤三:光源强度计算;步骤四:光照环境合成;步骤五:输出最终用以渲染虚拟物体的光照分布。本发明利用恢复的光照绘制虚拟物体,并将绘制好的虚拟物体合成进背景图像,从而生成高度真实的虚实融合结果;使用了场景深度信息,能够对场景的几何信息进行自动分析,从而省去了人工交互。