
基于激光雷达的室内场景三维重建系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光雷达的室内场景三维重建系统设计.docx
基于激光雷达的室内场景三维重建系统设计基于激光雷达的室内场景三维重建系统设计摘要:随着室内场景三维重建技术的逐渐成熟和发展,人们对于室内场景的三维重建需求越来越高。本文提出了一种基于激光雷达的室内场景三维重建系统的设计方案。该系统采用激光雷达实时扫描室内场景,并利用回波数据建立点云模型,在此基础上进行数据处理和优化,最终生成高质量的室内场景三维模型。实验证明,该系统具有较高的重建精度和稳定性,具备实际应用的潜力。关键词:室内场景重建、激光雷达、点云模型、数据处理、优化1.引言室内场景三维重建技术是计算机视

基于单幅RGB图像的室内场景三维重建方法及系统.pdf
本发明涉及一种基于单幅RGB图像的室内场景三维重建方法及系统。所述重建方法包括:获取室内场景ScanNet数据集,并对所述ScanNet数据集进行划分,确定训练集以及测试集;利用随机样本一致性RANSAC算法,从所述训练集中重复提取平面,确定室内场景待重建平面;利用局部特征提取分支提取所述室内场景待重建平面的局部特征;所述局部特征提取分支用于提取局部特征;根据所述局部特征以及扩张残差DRN网络确定全局特征;根据所述局部特征以及所述全局特征构建基于单幅RGB图像的室内场景三维重建网络模型;根据所述室内场景三

一种基于图像的室内大场景自动三维重建系统.docx
一种基于图像的室内大场景自动三维重建系统一、引言随着室内设计和场所规划的不断发展,室内大场景自动三维重建技术越来越受到人们的关注。传统的室内大场景三维重建,往往需要人工测量和手动绘制。这种方法费时费力,且存在不确定性,很难达到高精度、高效率、高可靠性的标准。因此,建立一种快速、自动、精度高的室内大场景三维重建系统成为了当前学术和工业界的重大挑战之一。本文基于图像技术,介绍了一种基于图像的室内大场景自动三维重建系统。二、系统设计方案1.数据采集系统需要采集物品的图像数据作为输入。在数据采集过程中,需要为整个
基于Kinect的室内场景三维重建方法.pdf
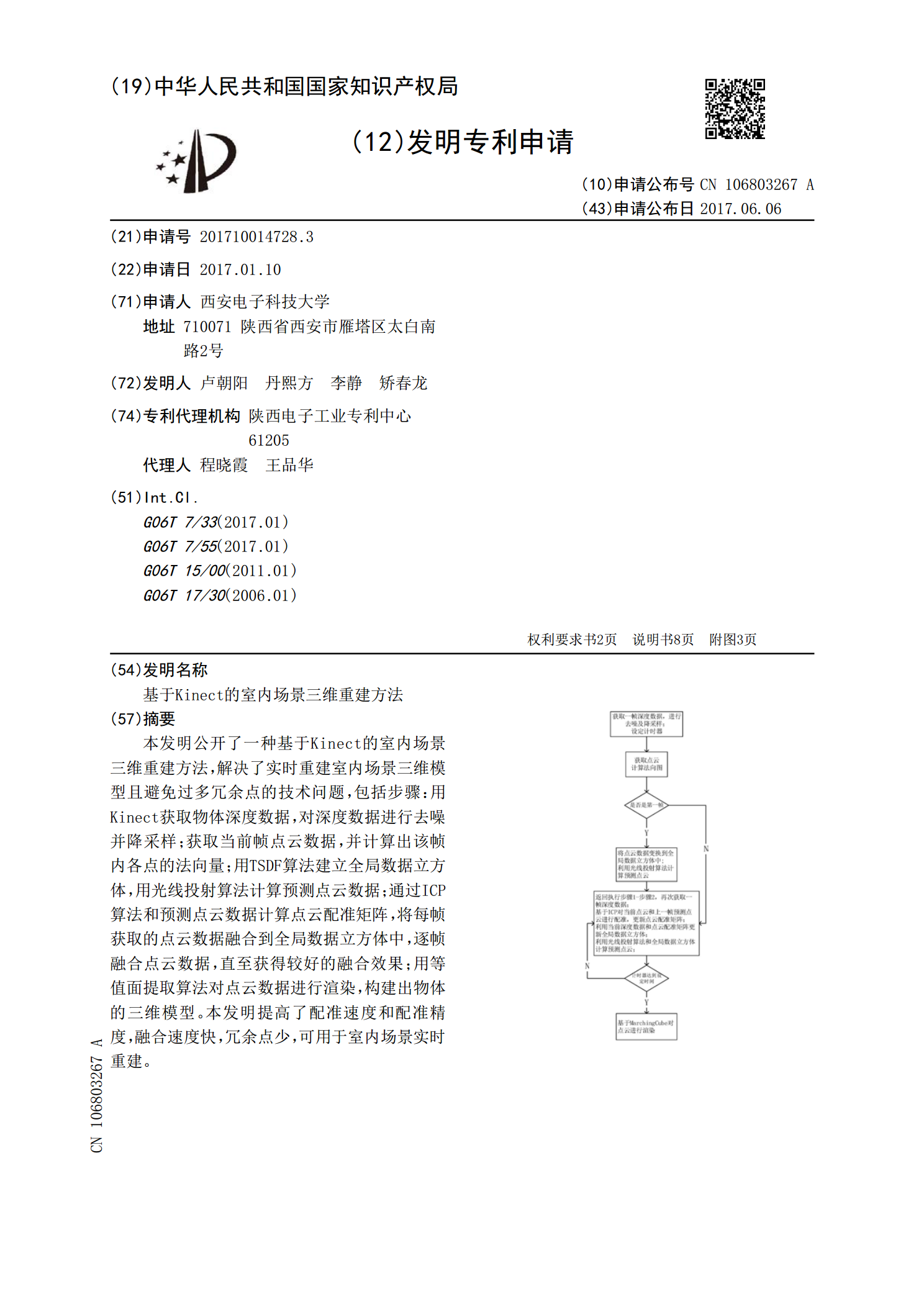
本发明公开了一种基于Kinect的室内场景三维重建方法,解决了实时重建室内场景三维模型且避免过多冗余点的技术问题,包括步骤:用Kinect获取物体深度数据,对深度数据进行去噪并降采样;获取当前帧点云数据,并计算出该帧内各点的法向量;用TSDF算法建立全局数据立方体,用光线投射算法计算预测点云数据;通过ICP算法和预测点云数据计算点云配准矩阵,将每帧获取的点云数据融合到全局数据立方体中,逐帧融合点云数据,直至获得较好的融合效果;用等值面提取算法对点云数据进行渲染,构建出物体的三维模型。本发明提高了配准速度和

基于二维激光雷达的自动室内三维重建系统的任务书.docx
基于二维激光雷达的自动室内三维重建系统的任务书任务背景:室内空间的三维重建在建筑设计、室内装修和智能家居等领域具有广泛的应用。目前,传统的室内三维重建方法包括结构光、多视角成像等方式,但这些技术普遍存在建模质量低、数据密集等问题。而基于激光雷达的三维重建方法具有使用方便、能够快速捕捉测量数据等优势,成为了近年来室内三维重建领域的研究热点之一。任务目标:基于二维激光雷达实现室内三维建模,并提供可视化展示和存储功能,实现室内空间的快速、准确、可靠的三维建模,为建筑设计、室内装修和智能家居等领域提供技术支持。任