
一种基于RGB-D图像的室内场景三维重建方法.pdf

朋兴****en


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于RGB-D图像的室内场景三维重建方法.pdf
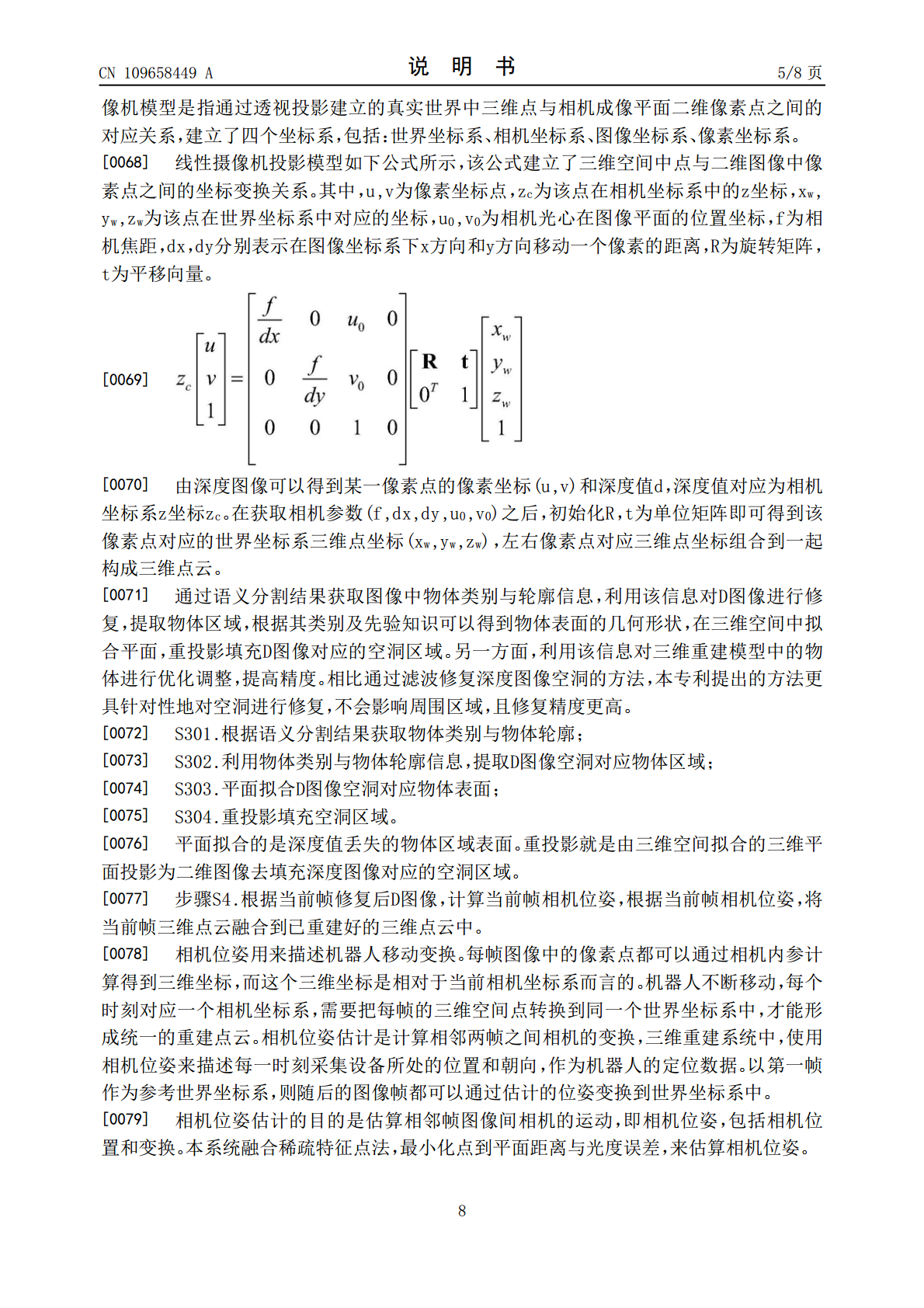
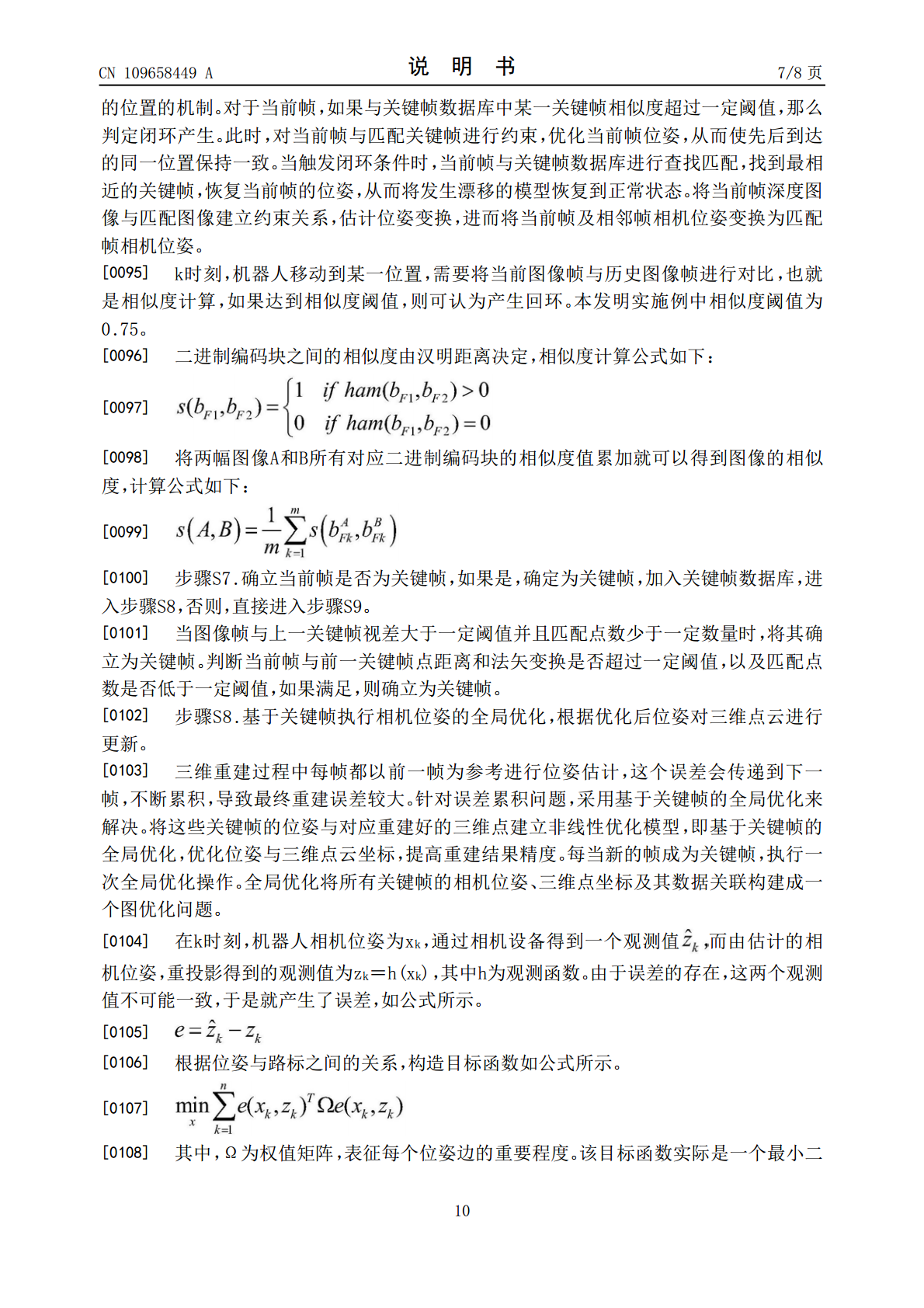
本发明公开了一种基于RGB‑D图像的室内场景三维重建方法,利用语义分割结果修复深度图像空洞,为三维重建提供物体轮廓与类别信息,根据先验知识获取到物体的形状和外观,从而为三维重建提供更加精确的数据。三维重建为语义分割提供三维空间信息,解决二维图像分割中存在的物体交叠、受光照影响等导致的误分割。使用多层次的相机位姿估计,稀疏的特征匹配提供粗略的估计位姿,再通过密集的几何、光度优化方法,得到精确相机位姿,为重建模型提供更加精确的相机位姿。在重建过程中,对每帧进行局部优化,同时加入关键帧机制,建立全局优化与闭环检

基于单幅RGB图像的室内场景三维重建方法及系统.pdf
本发明涉及一种基于单幅RGB图像的室内场景三维重建方法及系统。所述重建方法包括:获取室内场景ScanNet数据集,并对所述ScanNet数据集进行划分,确定训练集以及测试集;利用随机样本一致性RANSAC算法,从所述训练集中重复提取平面,确定室内场景待重建平面;利用局部特征提取分支提取所述室内场景待重建平面的局部特征;所述局部特征提取分支用于提取局部特征;根据所述局部特征以及扩张残差DRN网络确定全局特征;根据所述局部特征以及所述全局特征构建基于单幅RGB图像的室内场景三维重建网络模型;根据所述室内场景三

一种基于图像的室内大场景自动三维重建系统.docx
一种基于图像的室内大场景自动三维重建系统一、引言随着室内设计和场所规划的不断发展,室内大场景自动三维重建技术越来越受到人们的关注。传统的室内大场景三维重建,往往需要人工测量和手动绘制。这种方法费时费力,且存在不确定性,很难达到高精度、高效率、高可靠性的标准。因此,建立一种快速、自动、精度高的室内大场景三维重建系统成为了当前学术和工业界的重大挑战之一。本文基于图像技术,介绍了一种基于图像的室内大场景自动三维重建系统。二、系统设计方案1.数据采集系统需要采集物品的图像数据作为输入。在数据采集过程中,需要为整个
基于RGBD单视角图像人体三维重建方法及装置.pdf
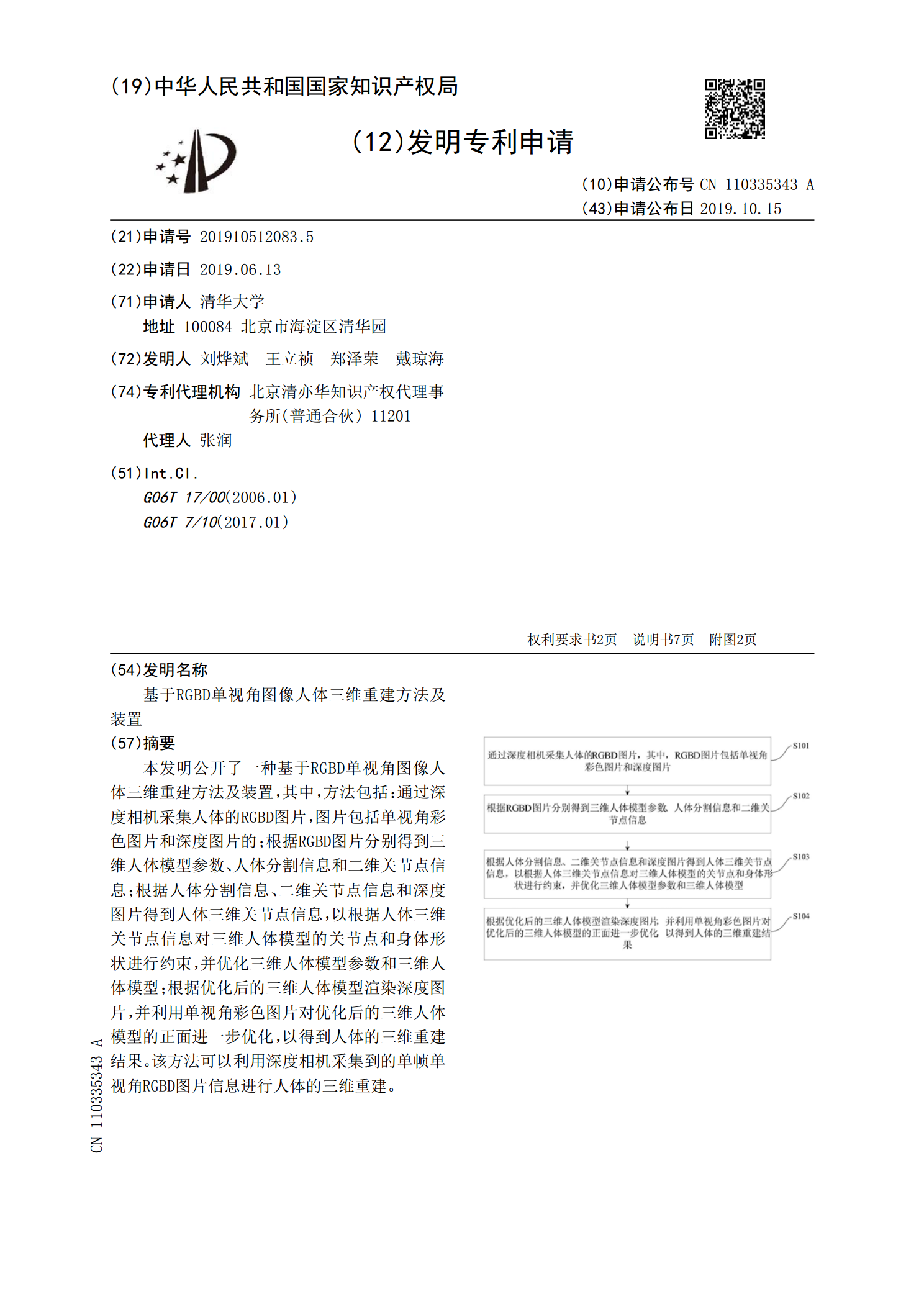
本发明公开了一种基于RGBD单视角图像人体三维重建方法及装置,其中,方法包括:通过深度相机采集人体的RGBD图片,图片包括单视角彩色图片和深度图片的;根据RGBD图片分别得到三维人体模型参数、人体分割信息和二维关节点信息;根据人体分割信息、二维关节点信息和深度图片得到人体三维关节点信息,以根据人体三维关节点信息对三维人体模型的关节点和身体形状进行约束,并优化三维人体模型参数和三维人体模型;根据优化后的三维人体模型渲染深度图片,并利用单视角彩色图片对优化后的三维人体模型的正面进一步优化,以得到人体的三维重建
基于单张RGBD图像的人体三维重建方法及系统.pdf
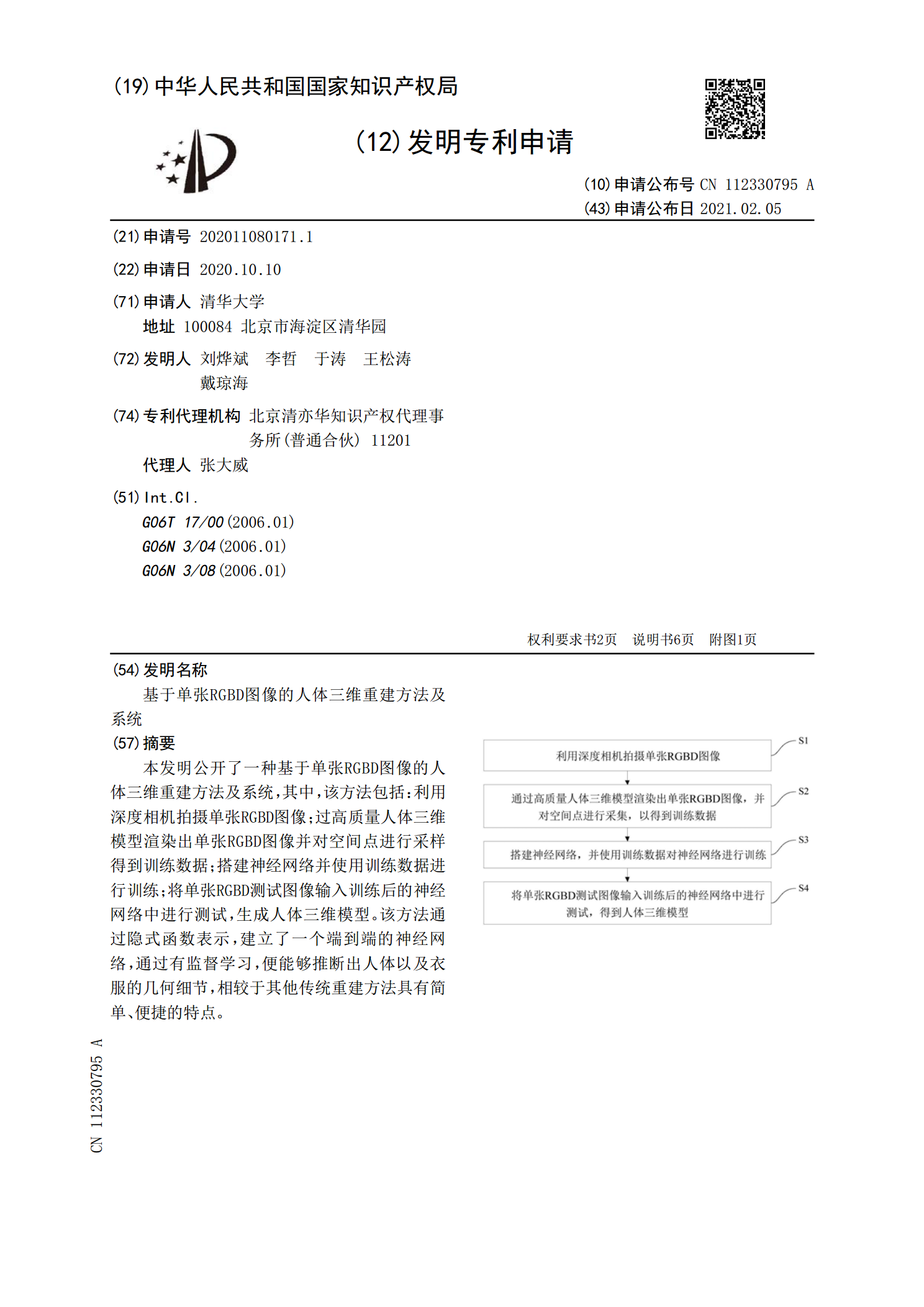
本发明公开了一种基于单张RGBD图像的人体三维重建方法及系统,其中,该方法包括:利用深度相机拍摄单张RGBD图像;过高质量人体三维模型渲染出单张RGBD图像并对空间点进行采样得到训练数据;搭建神经网络并使用训练数据进行训练;将单张RGBD测试图像输入训练后的神经网络中进行测试,生成人体三维模型。该方法通过隐式函数表示,建立了一个端到端的神经网络,通过有监督学习,便能够推断出人体以及衣服的几何细节,相较于其他传统重建方法具有简单、便捷的特点。