
轮腿机器人.pdf

一条****88

1/8

2/8
3/8

4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮腿机器人.pdf
本发明公开了一种轮腿机器人,包括机架,机架上设置有四条结构相同的具有轮、足两用功能的腿,每条腿包括大腿和绕大腿径向转动的小腿,小腿的末端设置有轮子,所述小腿上连接有用于驱动小腿前后摆动的小腿驱动装置,所述轮子上固定有用于驱动轮子转动的直流电机,所述直流电机通过固定在沿小腿径向延伸的转轴连接有用于驱动直流电机绕转轴转动的轮驱动装置,且电机的传动轴始终与转轴处于垂直状态。该机器人依靠大腿舵机带动大腿上下摆动和小腿舵机带动小腿前后摆动,共同实现该机器人的腿式行走,即使在光滑的路面也不会产生打滑,而且该机器人操作
轮腿机器人.pdf
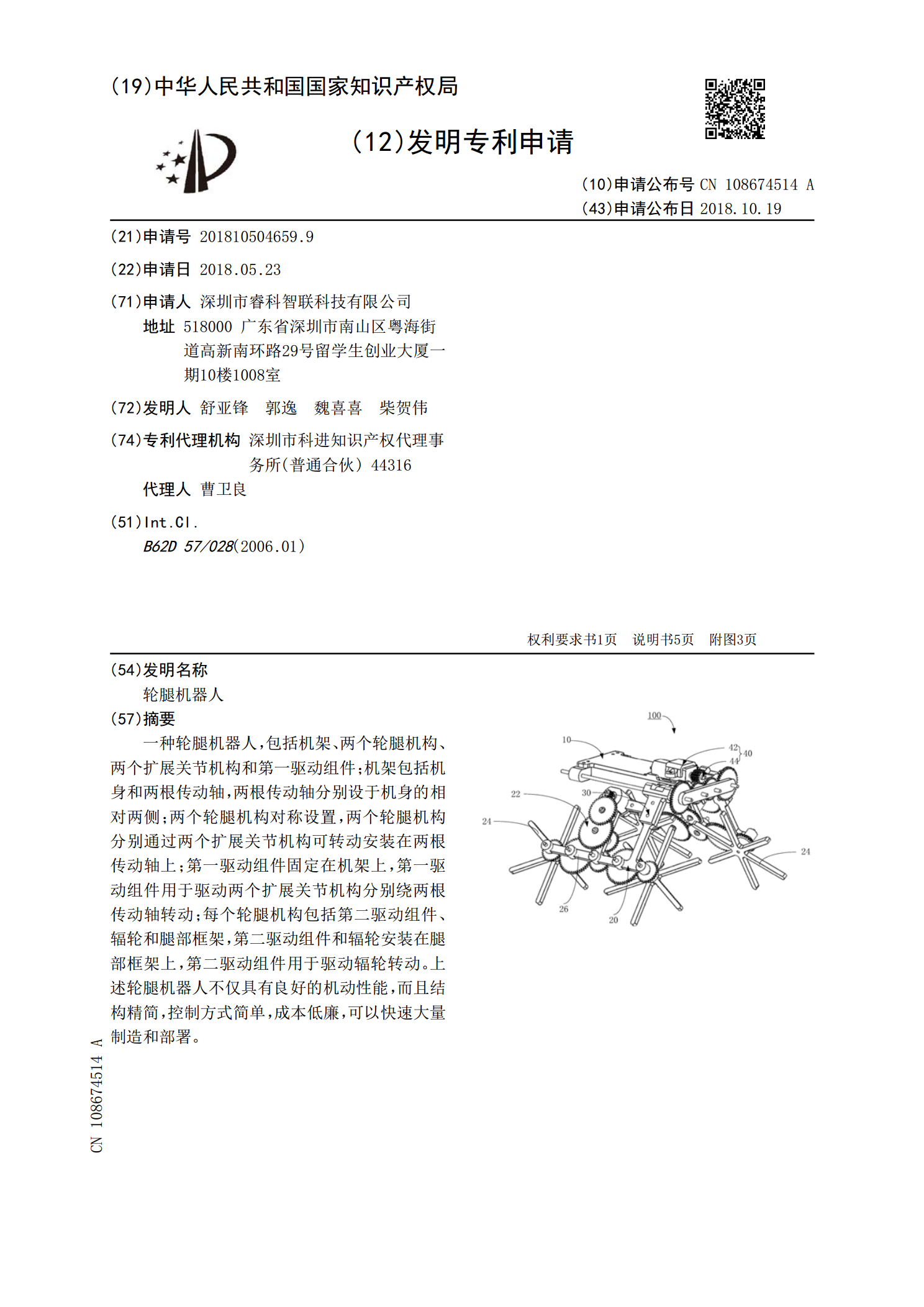
一种轮腿机器人,包括机架、两个轮腿机构、两个扩展关节机构和第一驱动组件;机架包括机身和两根传动轴,两根传动轴分别设于机身的相对两侧;两个轮腿机构对称设置,两个轮腿机构分别通过两个扩展关节机构可转动安装在两根传动轴上;第一驱动组件固定在机架上,第一驱动组件用于驱动两个扩展关节机构分别绕两根传动轴转动;每个轮腿机构包括第二驱动组件、辐轮和腿部框架,第二驱动组件和辐轮安装在腿部框架上,第二驱动组件用于驱动辐轮转动。上述轮腿机器人不仅具有良好的机动性能,而且结构精简,控制方式简单,成本低廉,可以快速大量制造和部署

轮腿机器人及轮腿的智能切换方法.pdf
本发明涉及轮腿机器人及轮腿的智能切换方法,机器人检测并计算要行走路况前后、左右倾斜情况,并与对应的设定倾斜范围进行比较,以判断是否进行行走方式的切换,若是需要进行切换,则通过舵机控制器控制各舵机动作进行轮腿切换,若是无需切换,则继续先前的行走方式继续行进;本发明无需操作者手眼高度精准的配合,也无需实时跟踪进行操作,且若是机器人在行进过程中遇到路况的改变能够自动进行轮腿的切换,顺利到达既定目标,提高了机器人的智能化。
轮腿行进式机器人.pdf
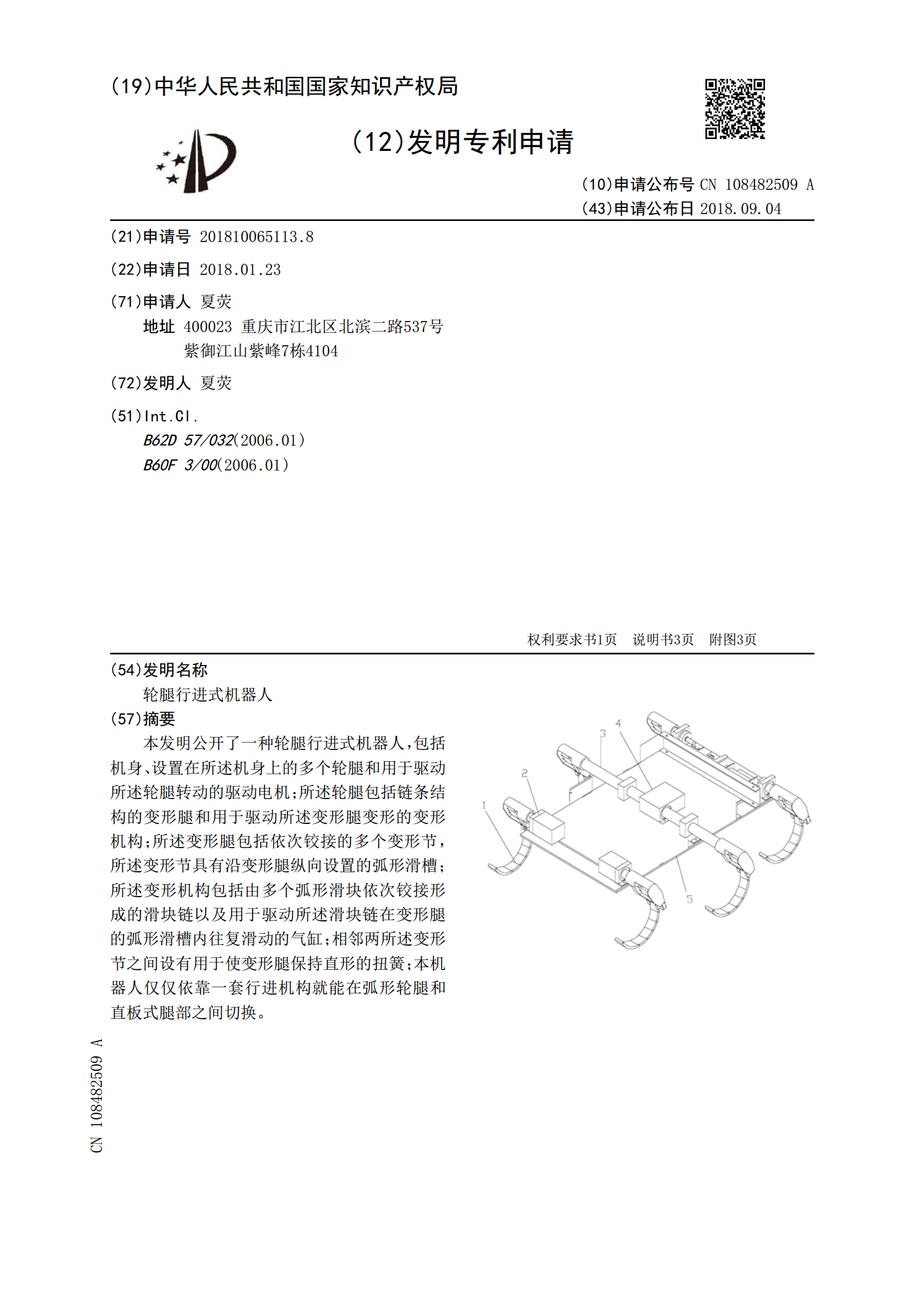
本发明公开了一种轮腿行进式机器人,包括机身、设置在所述机身上的多个轮腿和用于驱动所述轮腿转动的驱动电机;所述轮腿包括链条结构的变形腿和用于驱动所述变形腿变形的变形机构;所述变形腿包括依次铰接的多个变形节,所述变形节具有沿变形腿纵向设置的弧形滑槽;所述变形机构包括由多个弧形滑块依次铰接形成的滑块链以及用于驱动所述滑块链在变形腿的弧形滑槽内往复滑动的气缸;相邻两所述变形节之间设有用于使变形腿保持直形的扭簧;本机器人仅仅依靠一套行进机构就能在弧形轮腿和直板式腿部之间切换。

轮腿式越障机器人.pdf
本发明提供了一种轮腿式越障机器人,属于移动机器人领域,其包括相连接的机架和轮腿机构;轮腿机构包括机架关节、机械臂转向装置、机械臂、轮体转向装置和轮体装置;机械臂转向装置与机架关节转动连接,机械臂一端与机械臂转向装置连接,另一端连接轮体转向装置,轮体装置与轮体转向装置转动连接,机械臂包括伸缩驱动装置以及能够折叠变形的四边形机构,伸缩驱动装置的固定端和伸缩端分别连接四边形机构的对角线的两端。利用机械臂转向装置能够驱动机械臂水平转动,利用轮体转向装置能够驱动轮体装置水平转动,机械臂通过其自身的伸缩驱动装置实现沿