
潜伏式AGV移动搬运机器人.pdf

波峻****99


1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

潜伏式AGV移动搬运机器人.pdf
本发明公开了一种潜伏式AGV移动搬运机器人,AGV车体包括AGV驱动总成、车体骨架、辅助轮、控制系统模块、后面板和操作面板,所述AGV驱动总成设于车体骨架的中下部,AGV驱动总成采用电机偏置加链传动的方式,驱动轮着地,并在其两侧装有磁导航传感器,AGV车体的正下方设有用于检测地面磁卡路标的RFID读卡器,AGV车体的前方两底部均设有两个悬空的辅助轮、安全防撞条和红外避障检测模块,车体骨架上装有自动升降牵引机构和磁导航传感器,本发明安全可靠,成本低,内部功能模块集成化高,可以满足各种使用需求,通用性强。

背驮式AGV移动搬运机器人.pdf
一种背驮式AGV移动搬运机器人,包括车体底盘(10)、控制元件(12)、带有充电连接器(3)的电池(7)、带牵引电机(4)的驱动轮(5)、从动轮(8)、支撑轮(14),驱动轮的牵引电机轴和回转主轴均安装有编码器(6),底盘底部装有磁栅尺(9),车体底盘前后各有一个激光安全保护装置(2)和接触式保护圈(1),且车体底盘两侧装有接触式防护装置(13),上部安装辊道或者外联移载机构(11),车体底盘由电池供电,车头下方装有充电连接器,支撑轮(14)下缘不接触地面。采用单舵轮驱动、多从动轮支撑的车体底盘结构,实现

全向潜伏式AGV.pdf
本发明揭示了一种全向潜伏式AGV,包括机器人本体、举升单元、驱动转向单元、定位导航与控制单元和电源单元,其中举升单元设于机器人本体的内部且设有外露于顶侧的托板,托板受控对所承载的货架举升、回转;驱动转向单元设于机器人本体的内部且设有外露于底侧的驱动轮,驱动轮受控等速直行、差速转向运行;定位导航与控制单元在机器人本体内部分别与前述两单元电性连接,接收指令、导航信息并发送驱动、控制信号;电源单元则用于相接各单元间的供能。应用该全向潜伏式AGV,能提高电商配送中心拣选效率,实现从货物到人的自动化;使用灵活,极具
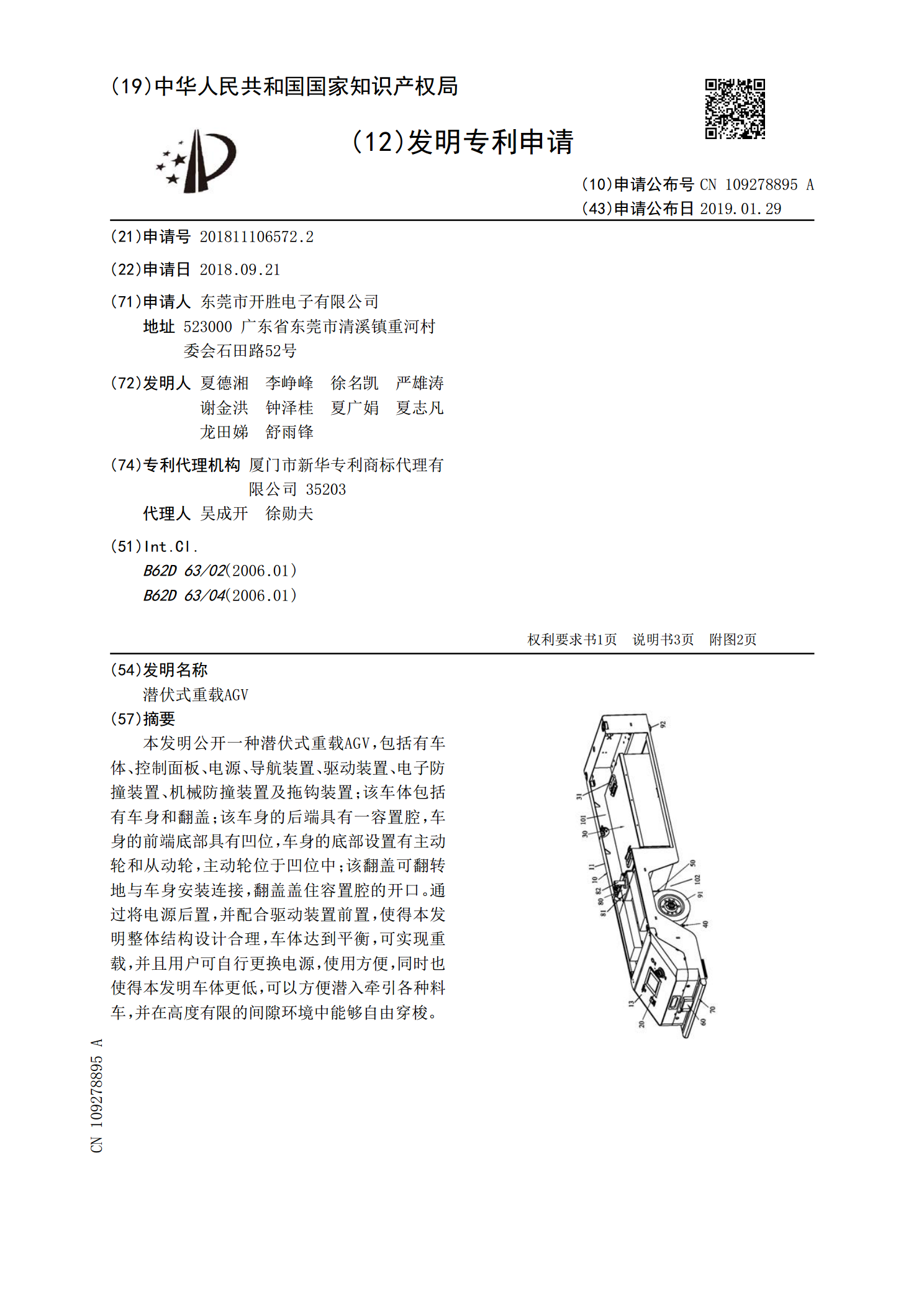
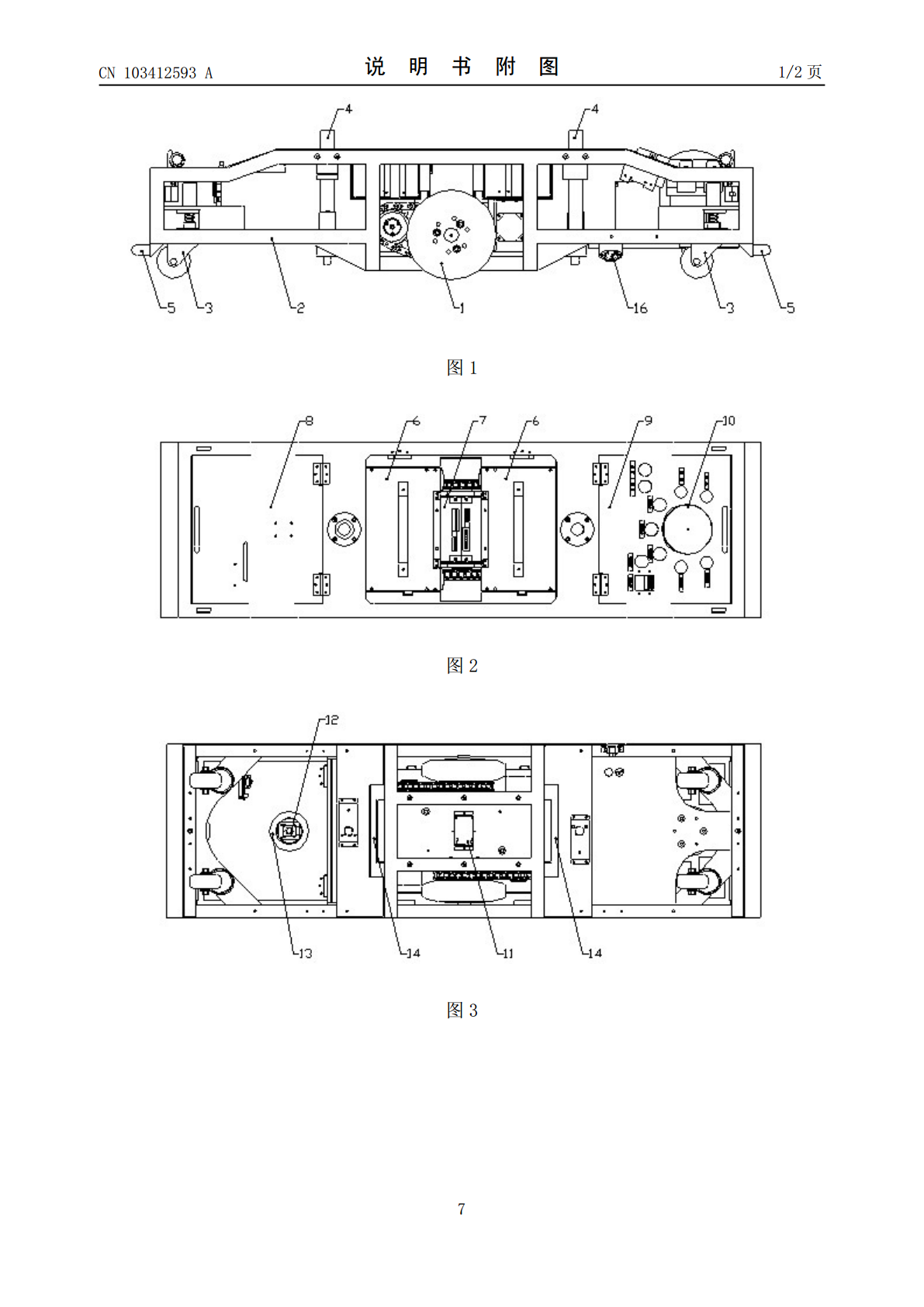
潜伏式重载AGV.pdf
本发明公开一种潜伏式重载AGV,包括有车体、控制面板、电源、导航装置、驱动装置、电子防撞装置、机械防撞装置及拖钩装置;该车体包括有车身和翻盖;该车身的后端具有一容置腔,车身的前端底部具有凹位,车身的底部设置有主动轮和从动轮,主动轮位于凹位中;该翻盖可翻转地与车身安装连接,翻盖盖住容置腔的开口。通过将电源后置,并配合驱动装置前置,使得本发明整体结构设计合理,车体达到平衡,可实现重载,并且用户可自行更换电源,使用方便,同时也使得本发明车体更低,可以方便潜入牵引各种料车,并在高度有限的间隙环境中能够自由穿梭。

智能AGV搬运机器人.pdf
本发明公开一种智能AGV搬运机器人,其包括车架、控制模块、磁导航模块、前轮驱动机构、后轮从动机构和转向机构;控制模块、磁导航模块、前轮驱动机构和后轮从动机构均安装在车架上;控制模块与磁导航模块、前轮驱动机构和转向机构相连;车架上设置有内齿圈;转向机构安装在前轮驱动机构上,转向机构包括第一电机以及与第一电机相连的第一转向主动齿轮,第一主动齿轮与内齿圈啮合。本发明的技术方案中,通过第一电机驱动第一转向主动齿轮转动,带动前轮驱动机构旋转,从而实现智能AGV搬运机器人的转向,使得智能AGV搬运机器人的转向驱动一体