
背驮式AGV移动搬运机器人.pdf

小沛****文章


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

背驮式AGV移动搬运机器人.pdf
一种背驮式AGV移动搬运机器人,包括车体底盘(10)、控制元件(12)、带有充电连接器(3)的电池(7)、带牵引电机(4)的驱动轮(5)、从动轮(8)、支撑轮(14),驱动轮的牵引电机轴和回转主轴均安装有编码器(6),底盘底部装有磁栅尺(9),车体底盘前后各有一个激光安全保护装置(2)和接触式保护圈(1),且车体底盘两侧装有接触式防护装置(13),上部安装辊道或者外联移载机构(11),车体底盘由电池供电,车头下方装有充电连接器,支撑轮(14)下缘不接触地面。采用单舵轮驱动、多从动轮支撑的车体底盘结构,实现

潜伏式AGV移动搬运机器人.pdf
本发明公开了一种潜伏式AGV移动搬运机器人,AGV车体包括AGV驱动总成、车体骨架、辅助轮、控制系统模块、后面板和操作面板,所述AGV驱动总成设于车体骨架的中下部,AGV驱动总成采用电机偏置加链传动的方式,驱动轮着地,并在其两侧装有磁导航传感器,AGV车体的正下方设有用于检测地面磁卡路标的RFID读卡器,AGV车体的前方两底部均设有两个悬空的辅助轮、安全防撞条和红外避障检测模块,车体骨架上装有自动升降牵引机构和磁导航传感器,本发明安全可靠,成本低,内部功能模块集成化高,可以满足各种使用需求,通用性强。

智能AGV搬运机器人.pdf
本发明公开一种智能AGV搬运机器人,其包括车架、控制模块、磁导航模块、前轮驱动机构、后轮从动机构和转向机构;控制模块、磁导航模块、前轮驱动机构和后轮从动机构均安装在车架上;控制模块与磁导航模块、前轮驱动机构和转向机构相连;车架上设置有内齿圈;转向机构安装在前轮驱动机构上,转向机构包括第一电机以及与第一电机相连的第一转向主动齿轮,第一主动齿轮与内齿圈啮合。本发明的技术方案中,通过第一电机驱动第一转向主动齿轮转动,带动前轮驱动机构旋转,从而实现智能AGV搬运机器人的转向,使得智能AGV搬运机器人的转向驱动一体

物流搬运机器人-AGV.pdf
物流搬运-AGV【正文】一、物流搬运-AGV设计概述:1.1项目背景物流行业的发展,对物流搬运工作提出了更高的要求,传统的人工搬运已经无法满足需求。因此,AGV(AutomatedGuidedVehicle)搬运被引入物流行业,以提高效率和减轻工人劳动强度。1.2功能物流搬运-AGV是一种能够自主导航、搬运货物的智能。其主要功能包括:-货物搬运:能够自动识别和搬运各种类型和大小的货物;-导航系统:通过激光、摄像头等传感器实现自主导航;-运动控制:能够根据场景需求灵活调整速度和运动方向;-通信功能:能够与物
一种AGV汽车搬运机器人.pdf
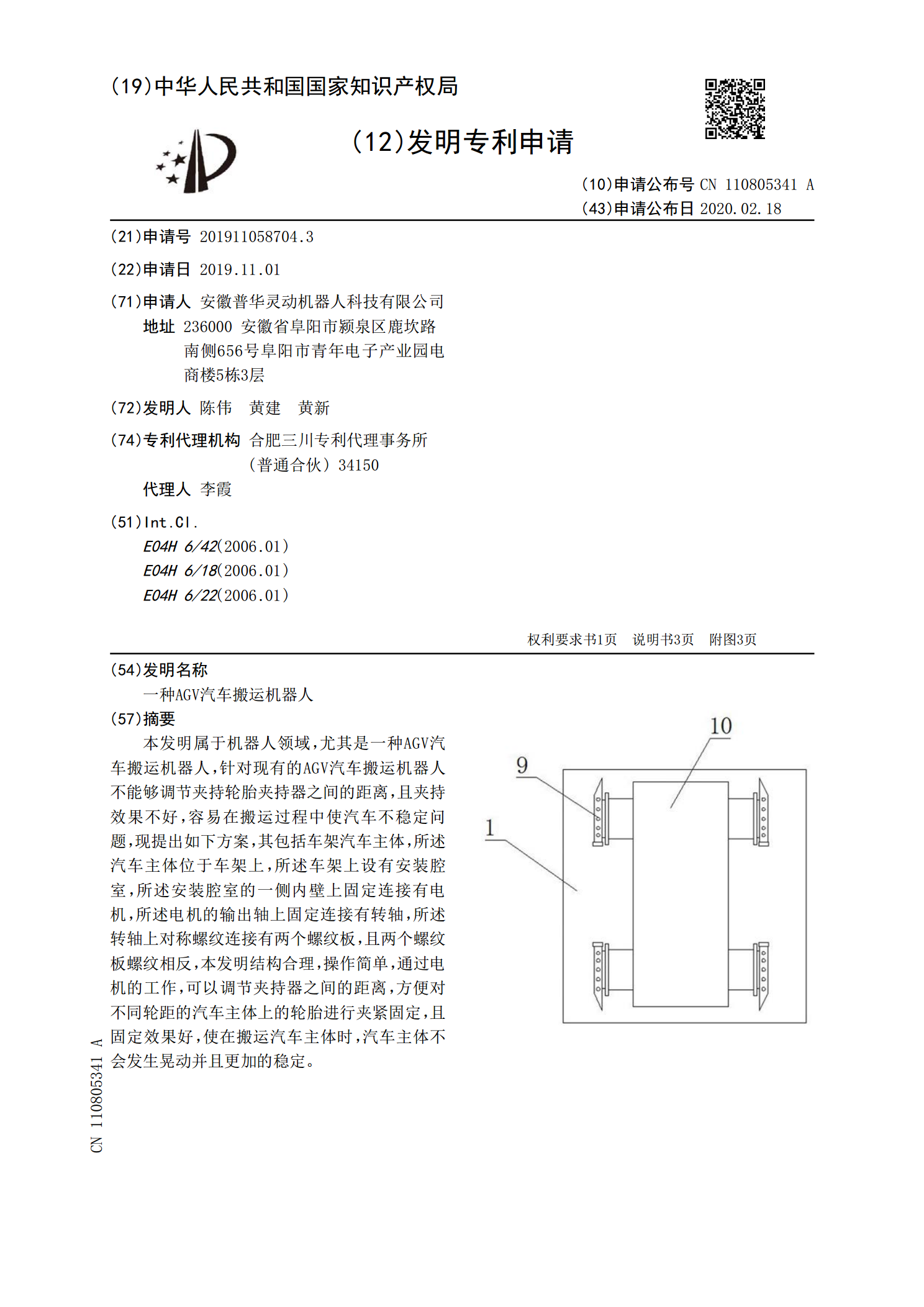
本发明属于机器人领域,尤其是一种AGV汽车搬运机器人,针对现有的AGV汽车搬运机器人不能够调节夹持轮胎夹持器之间的距离,且夹持效果不好,容易在搬运过程中使汽车不稳定问题,现提出如下方案,其包括车架汽车主体,所述汽车主体位于车架上,所述车架上设有安装腔室,所述安装腔室的一侧内壁上固定连接有电机,所述电机的输出轴上固定连接有转轴,所述转轴上对称螺纹连接有两个螺纹板,且两个螺纹板螺纹相反,本发明结构合理,操作简单,通过电机的工作,可以调节夹持器之间的距离,方便对不同轮距的汽车主体上的轮胎进行夹紧固定,且固定效果