
一种四轮独立驱动、独立转向电动汽车协调控制系统.pdf

爱欢****23


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种四轮独立驱动、独立转向电动汽车协调控制系统.pdf
一种四轮独立驱动、独立转向电动汽车协调控制系统,包括依次相连的全局信号反馈模块、整车控制模块、协调控制模块和电机控制模块;所述整车控制模块包括整车控制器以及与整车控制器相连的电池管理系统、车载照明装置、制冷与制热装置。本发明中由于设置协调控制器,可以避免整车控制器设计过于复杂,提高整车控制器、协调控制器和电机控制器的实时响应速度及运行可靠性。协调控制器提高了四轮独立驱动、独立转向电动汽车能量的利用效率和驾驶舒适性,并提高驾驶的安全性。实现了更为科学的模块式控制,有利于电动汽车的模块化生产,促进了电动汽车控

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及
电动汽车四轮独立驱动独立转向执行机构及执行方法.pdf
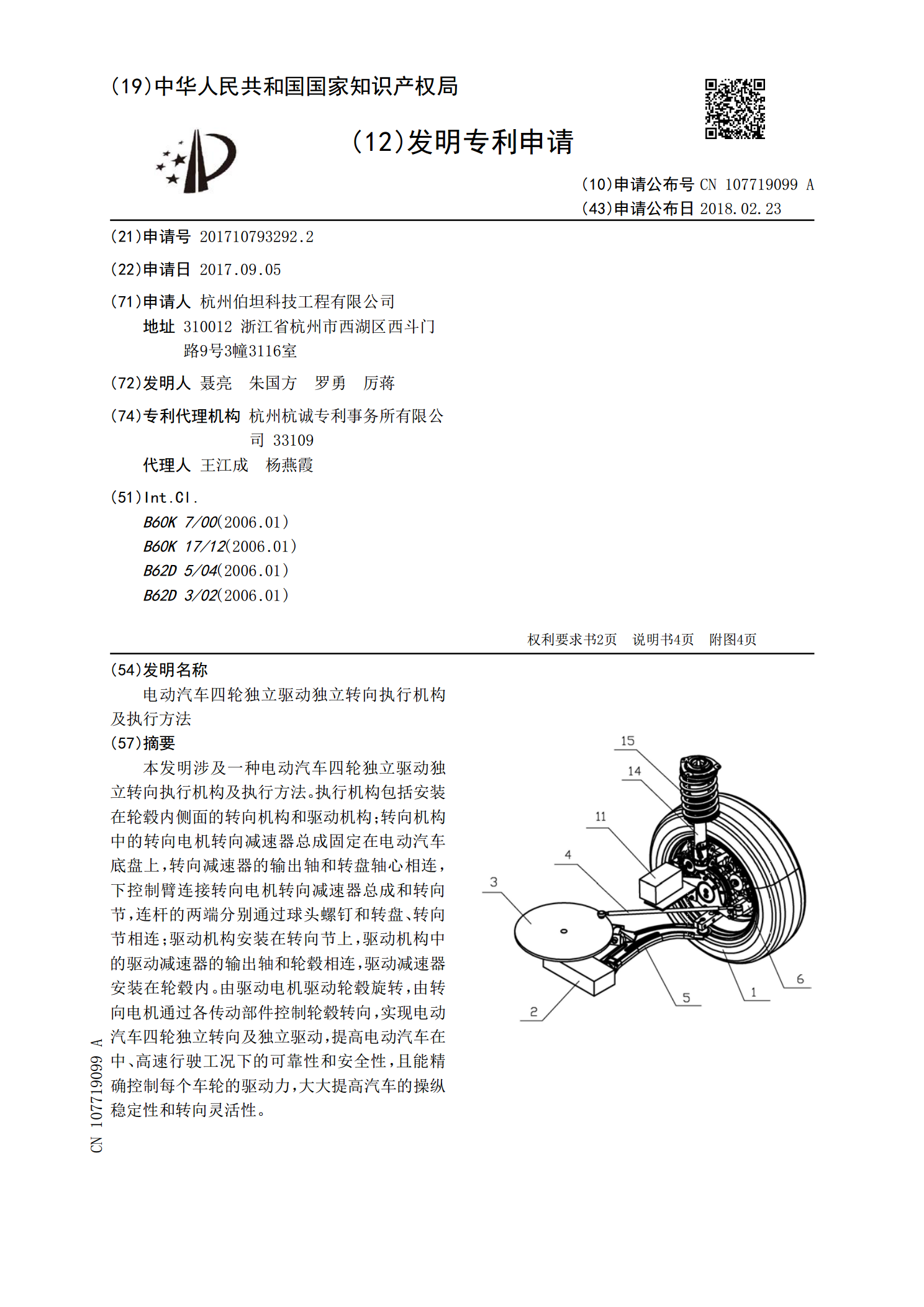
本发明涉及一种电动汽车四轮独立驱动独立转向执行机构及执行方法。执行机构包括安装在轮毂内侧面的转向机构和驱动机构;转向机构中的转向电机转向减速器总成固定在电动汽车底盘上,转向减速器的输出轴和转盘轴心相连,下控制臂连接转向电机转向减速器总成和转向节,连杆的两端分别通过球头螺钉和转盘、转向节相连;驱动机构安装在转向节上,驱动机构中的驱动减速器的输出轴和轮毂相连,驱动减速器安装在轮毂内。由驱动电机驱动轮毂旋转,由转向电机通过各传动部件控制轮毂转向,实现电动汽车四轮独立转向及独立驱动,提高电动汽车在中、高速行驶工况

用于分布式驱动独立转向电动汽车的悬架及转向系统.pdf
本发明公开了一种用于分布式驱动独立转向电动汽车的悬架及转向系统,通过安装支架固定在车身上,包括车轮、轮毂电机、车轮支架、制动器、转向系统以及双横臂悬架系统,所述转向系统安装于车身的安装支架之上,所述车轮支架与所述转向系统输出端相联,所述双横臂悬架系统安装于车轮支架上,所述双横臂悬架系统与所述转向系统之间的运动无干涉。本发明所提供的装置使单个车轮具有大转向角能力的同时,集成了带有横向稳定器的双横臂悬架系统,从而改善了轮胎接地状态、提高附着极限、减少了轮胎磨损,增大了汽车侧倾刚度,从而改善了操纵稳定性,且整个

一种后轮为独立电机驱动的电动汽车的驱动控制系统.pdf
本发明公开了一种后轮为独立电机驱动的电动汽车的驱动控制系统,包括驱动控制器,其特征在于:左前轮转速传感器、右前轮转速传感器、左后轮转速传感器、右后轮转速传感器、左驱动电机的霍尔位置传感器、右驱动电机的霍尔位置传感器、加速踏板位置传感器、方向盘转角传感器和制动传感器电信号的各个输出端分别与驱动控制器的相应信号输入端相连接,左后轮驱动电机和右后轮驱动电机的电源线与控制器的相应输出接口相连,所述驱动控制器还具有与外界通讯的CAN接口。本发明的驱动控制系统,适用于前轮为转向轮,后轮为独立电机驱动的电动汽车的驱动控