
车辆车轮位置的定位方法.pdf

雨巷****凝海


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于定位车辆的车轮的位置的方法.pdf
本发明涉及一种用于对车辆(1)的车轮(2-5)的位置进行定位的方法,所述方法包括针对每个车轮(2-5)存储源自装配到所述车轮的电子模块(6-9)的信号的强度的图像的初始阶段。根据本发明,由每个电子模块(6-9)对以预定时间间隔发射的n个信号的序列的发射被控制,对于每个n个信号的序列,所述序列的每个信号与所存储的图像中的每个图像之间的相关系数的时间变化被计算,所述n个信号中的每个的相关系数的相关峰值以及所述n个相关峰值中的每个在车轮转动期间的时间位置被计算,以及,针对每个所存储的图像,选择具有与如下时间间隔

车辆车轮位置的定位方法.pdf
本发明涉及车辆的车轮位置的定位方法,每个车轮配备有电子模块,用于测量每个车轮的运行参数,为了对车轮位置进行定位的目的,该方法包括,控制通过配备于该车轮的电子模块而将对于所述电子模块的给定角位置θ1-θn在时间t1-tn传输的n个信号传输到连接的中央处理单元,也传输到速度传感器,所述速度传感器每个定位靠近车轮,能够以可转换为角度值的值的形式传送数据,所述数据表示车轮的取向。根据这种方法,中央处理单元被编程以对于车轮测量传感器在时间t1-tn时所提供的每系列角度值δ1到δn而计算代表值的离差δ1,(δ2-θ2
机动车辆车轮位置的定位方法.pdf
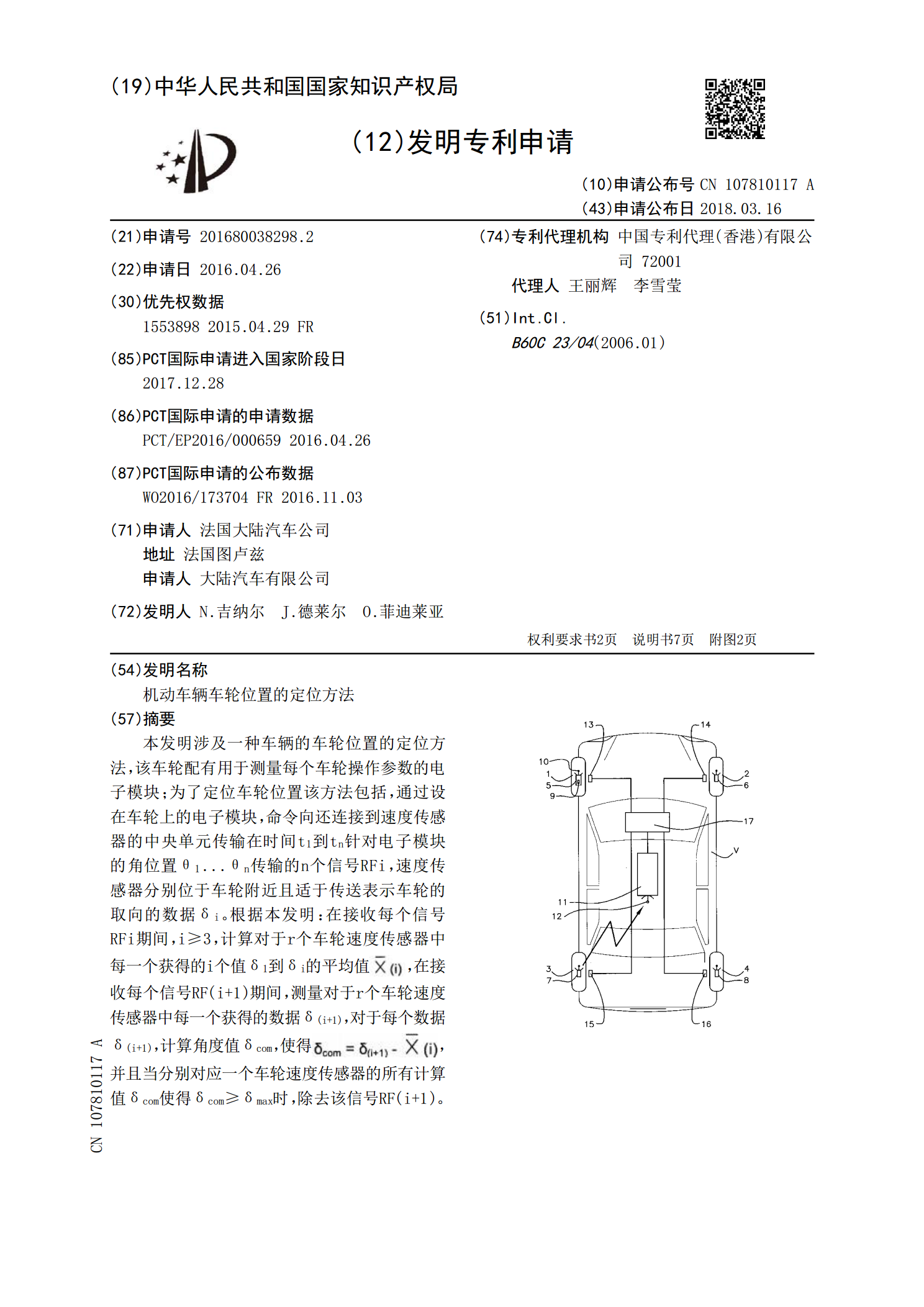
本发明涉及一种车辆的车轮位置的定位方法,该车轮配有用于测量每个车轮操作参数的电子模块;为了定位车轮位置该方法包括,通过设在车轮上的电子模块,命令向还连接到速度传感器的中央单元传输在时间t
车辆的车轮位置测定方法及车辆的车轮位置测定装置.pdf
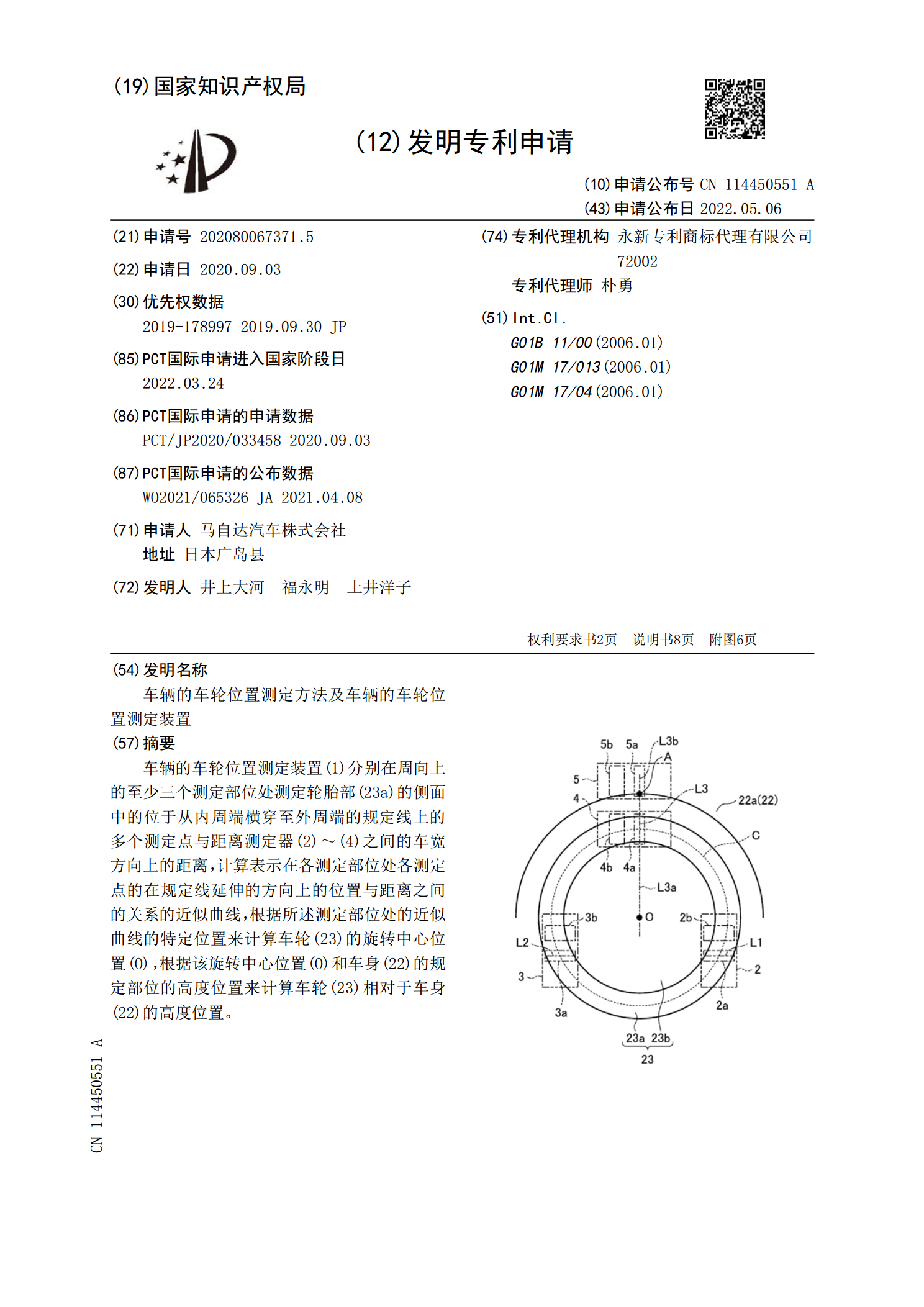
车辆的车轮位置测定装置(1)分别在周向上的至少三个测定部位处测定轮胎部(23a)的侧面中的位于从内周端横穿至外周端的规定线上的多个测定点与距离测定器(2)~(4)之间的车宽方向上的距离,计算表示在各测定部位处各测定点的在规定线延伸的方向上的位置与距离之间的关系的近似曲线,根据所述测定部位处的近似曲线的特定位置来计算车轮(23)的旋转中心位置(O),根据该旋转中心位置(O)和车身(22)的规定部位的高度位置来计算车轮(23)相对于车身(22)的高度位置。

确定车辆的车轮位置的方法.pdf
本发明涉及确定车辆(1)的每个配备有电子模块(3)的车轮(2)的位置的方法,由此,一方面为了确定车轮(2)的位置,车辆(1)装备有由至少两个靠近车轮(2)设置的并且物理补偿的发射天线(5、6)构成的电磁发射源,使得所述发射天线沿所述车轮的电子模块(3)的轨迹提供分开的阴影区域,并且在另一方面,指示发射天线(5、6)的连续的切换。