
擦玻璃机器人.pdf

康佳****文库


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

擦玻璃机器人.pdf
一种擦玻璃机器人,包括机体(1),机体上设有控制单元、驱动单元和第一清洁单元(2),擦玻璃机器人还包括可旋转设置在机体底部两端的一对吸附转盘(3),驱动单元通过控制单元与所述吸附转盘相连,控制单元分别控制动力在两个吸附转盘上输出的大小和方向,驱动一对吸附转盘以垂直于玻璃表面的竖直轴为中心旋转或静止,使两端的一对吸附转盘形成转速差,实现擦玻璃机器人的行走;其中,机体和吸附转盘之间可旋转设置有边角除尘单元(4),边角除尘单元的边缘至少部分突出于吸附转盘的外缘,形成除尘部,除尘部的外缘形状与待除尘的边角轮廓对应

擦玻璃机器人.pdf
本发明擦玻璃机器人包括机器人主体、行走单元、驱动单元、碰撞感知装置和控制单元,所述碰撞感知装置包括碰撞板和传感单元,所述碰撞板位于所述机器人主体的前进方向的端部,所述控制单元分别与所述传感单元和所述驱动单元连接,在所述控制单元的作用下,所述驱动单元控制所述行走单元工作;所述碰撞板上设有滑轮,该滑轮位于所述碰撞板的底部,且所述滑轮的轮廓边缘露出于所述碰撞板的轮廓边缘。本发明擦玻璃过程中能够躲避障碍物,实现均匀擦拭玻璃及玻璃边框四周,避免出现漏擦现象,有效地解决玻璃框的附近容易积灰的问题,并且减少碰撞板与玻璃
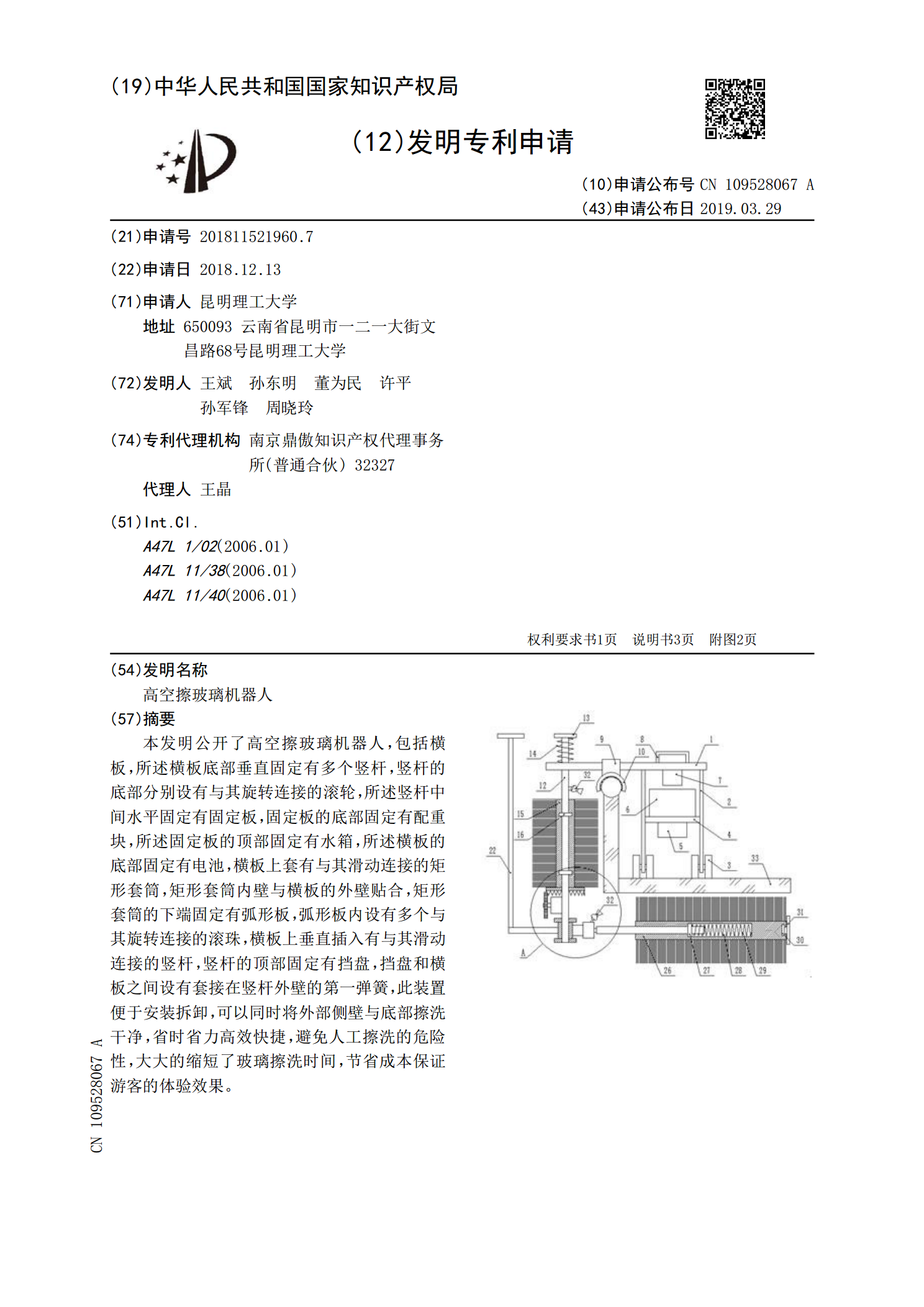
高空擦玻璃机器人.pdf
本发明公开了高空擦玻璃机器人,包括横板,所述横板底部垂直固定有多个竖杆,竖杆的底部分别设有与其旋转连接的滚轮,所述竖杆中间水平固定有固定板,固定板的底部固定有配重块,所述固定板的顶部固定有水箱,所述横板的底部固定有电池,横板上套有与其滑动连接的矩形套筒,矩形套筒内壁与横板的外壁贴合,矩形套筒的下端固定有弧形板,弧形板内设有多个与其旋转连接的滚珠,横板上垂直插入有与其滑动连接的竖杆,竖杆的顶部固定有挡盘,挡盘和横板之间设有套接在竖杆外壁的第一弹簧,此装置便于安装拆卸,可以同时将外部侧壁与底部擦洗干净,省时省

智能擦玻璃机器人方案.pptx
会计学
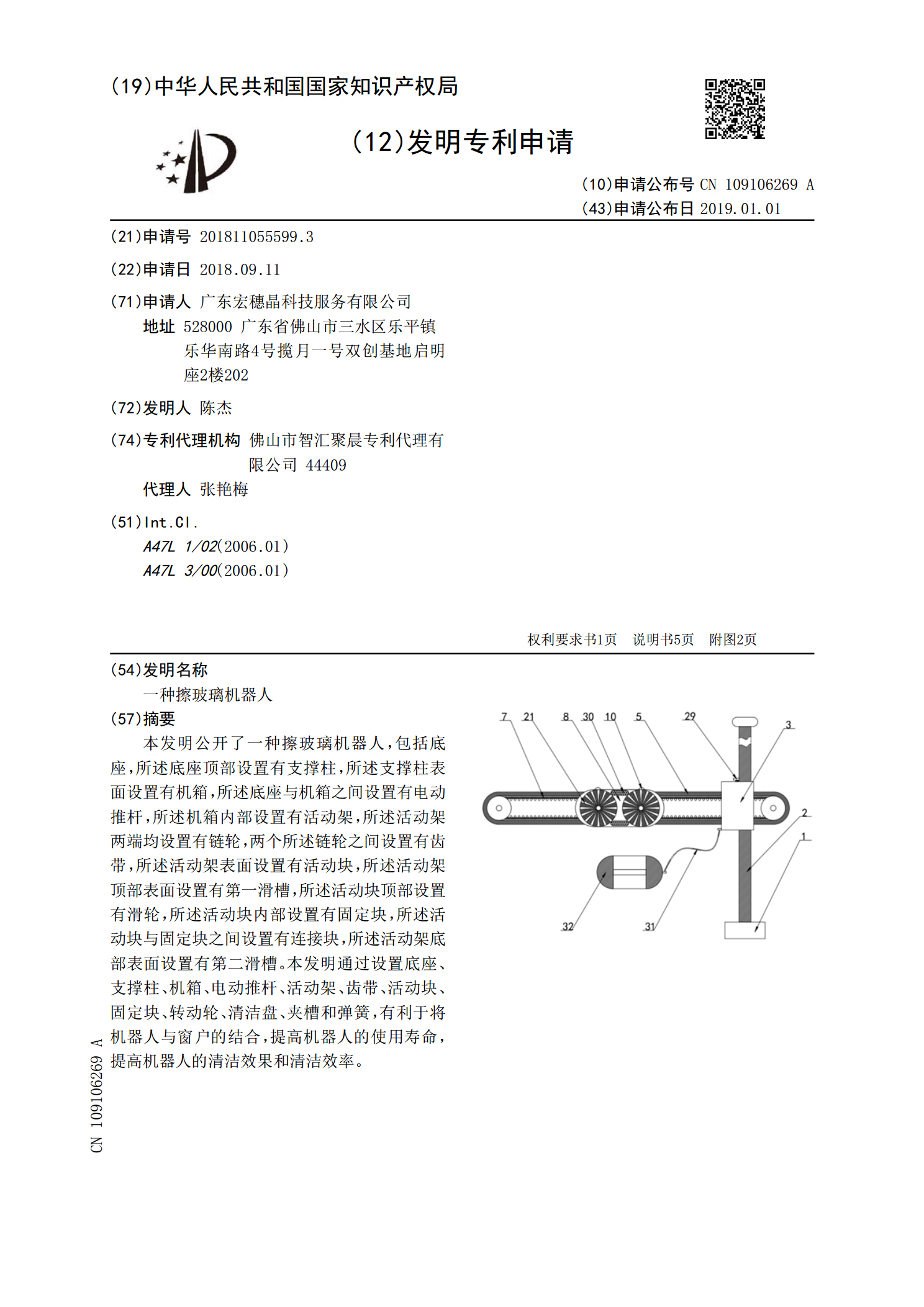
一种擦玻璃机器人.pdf
本发明公开了一种擦玻璃机器人,包括底座,所述底座顶部设置有支撑柱,所述支撑柱表面设置有机箱,所述底座与机箱之间设置有电动推杆,所述机箱内部设置有活动架,所述活动架两端均设置有链轮,两个所述链轮之间设置有齿带,所述活动架表面设置有活动块,所述活动架顶部表面设置有第一滑槽,所述活动块顶部设置有滑轮,所述活动块内部设置有固定块,所述活动块与固定块之间设置有连接块,所述活动架底部表面设置有第二滑槽。本发明通过设置底座、支撑柱、机箱、电动推杆、活动架、齿带、活动块、固定块、转动轮、清洁盘、夹槽和弹簧,有利于将机器人