
机器人清洁器及其控制方法.pdf

志信****pp


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人清洁器及其控制方法.pdf
本发明实施例公开了一种机器人清洁器及其控制方法。该机器人清洁器包括:主体,设置有吸入部和在其下端形成为倾斜的斜面;辅助前轮,布置在斜面的后侧;主轮,布置在辅助前轮的后侧且安排为使得主轮的高度相对于主体可变化;以及驱动单元,用于相对于主体降低或提升主轮,其中,当辅助前轮进入台阶部分时,驱动单元降低主轮。该机器人清洁器能够攀登比现有情况高的台阶部分。

机器人清洁器及机器人清洁器控制方法.pdf
公开了机器人清洁器及用于控制机器人清洁器的方法。机器人清洁器包括主体、一个或多个红外线(IR)传感器、驱动电机;以及控制器,其中:一个或多个IR传感器配置成在各个方向接收来自传输设备的IR信号;驱动电机配置成在从控制器接收到控制信号时将主体朝传输设备移动;控制器配置成通过生成传输设备方向估算值去除多个IR信号之中的反射波,以及根据传输设备方向估算值利用驱动电机控制主体的驱动。

清洁机器人及其控制方法.pdf
一种清洁机器人,用以清洁一特定区域,并包括一移动模块、一声波模块、一清扫模块以及一控制模块。移动模块具有多个滚轮。声波模块发射一声波,并接收多个反射波。清扫模块进行一清洁任务。控制模块根据反射波,产生一轮廓线,并根据轮廓线,控制移动模块及清扫模块的至少一者。
清洁机器人及其控制方法.pdf
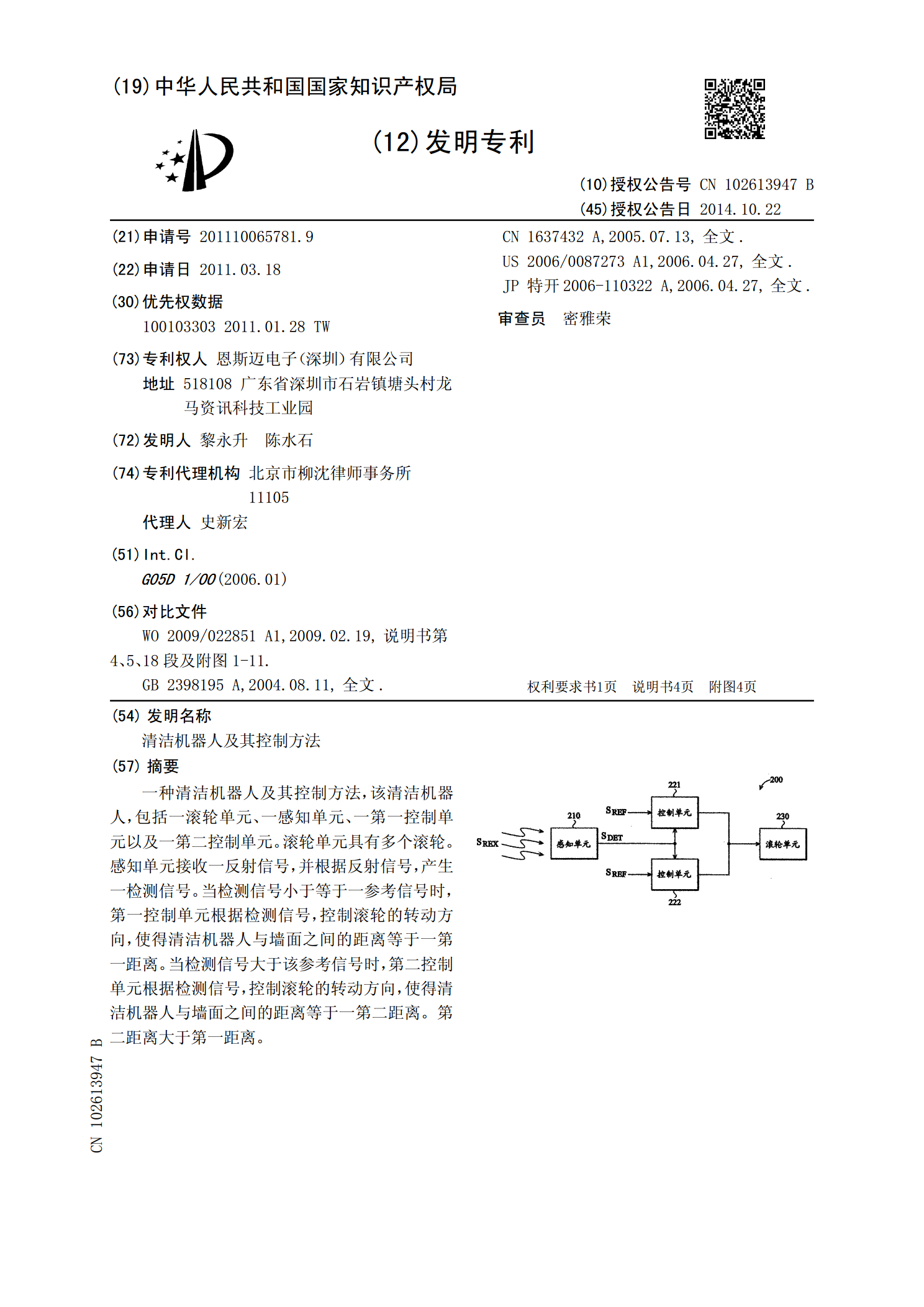
一种清洁机器人及其控制方法,该清洁机器人,包括一滚轮单元、一感知单元、一第一控制单元以及一第二控制单元。滚轮单元具有多个滚轮。感知单元接收一反射信号,并根据反射信号,产生一检测信号。当检测信号小于等于一参考信号时,第一控制单元根据检测信号,控制滚轮的转动方向,使得清洁机器人与墙面之间的距离等于一第一距离。当检测信号大于该参考信号时,第二控制单元根据检测信号,控制滚轮的转动方向,使得清洁机器人与墙面之间的距离等于一第二距离。第二距离大于第一距离。
机器人清洁器和包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法.pdf
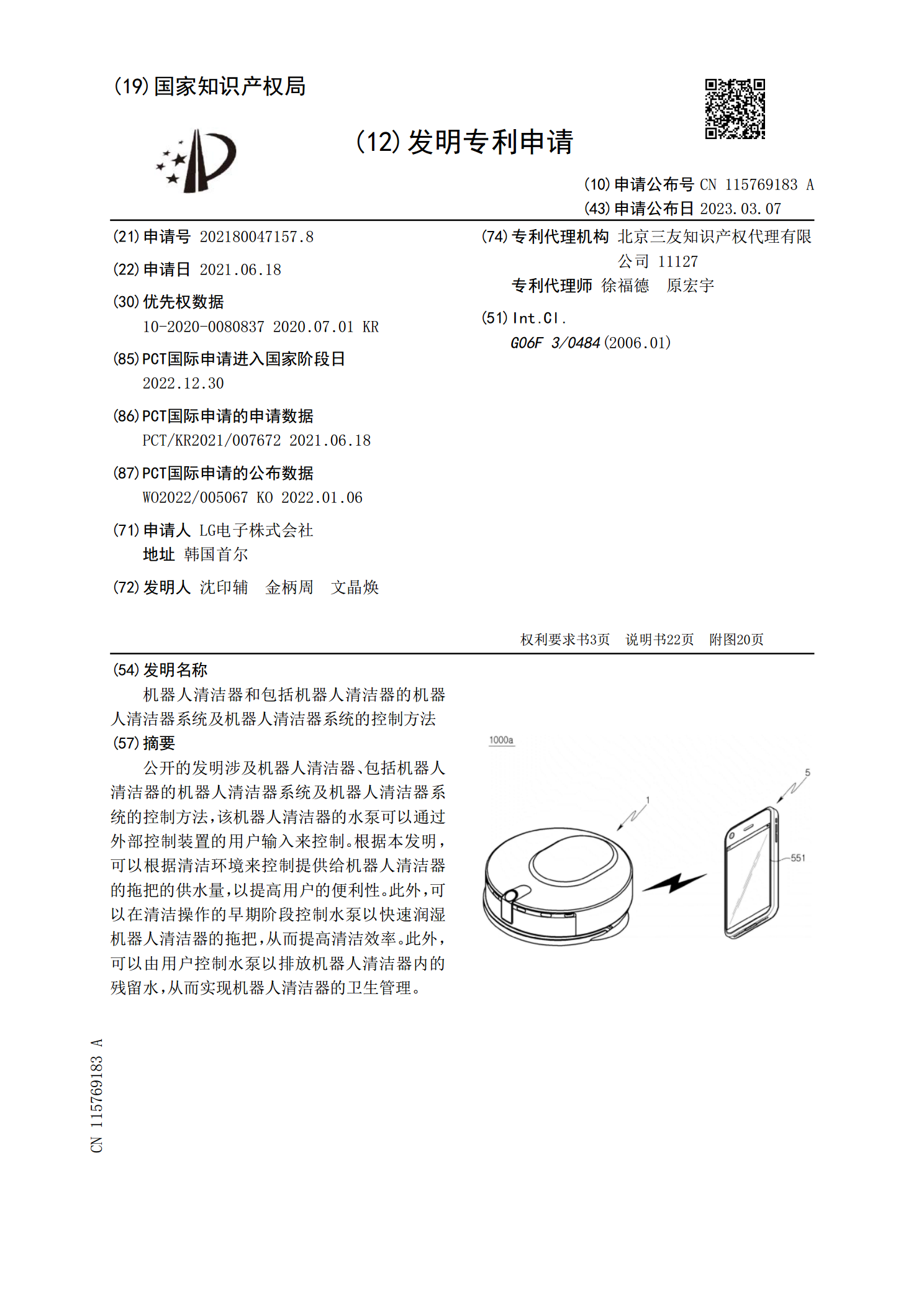
公开的发明涉及机器人清洁器、包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法,该机器人清洁器的水泵可以通过外部控制装置的用户输入来控制。根据本发明,可以根据清洁环境来控制提供给机器人清洁器的拖把的供水量,以提高用户的便利性。此外,可以在清洁操作的早期阶段控制水泵以快速润湿机器人清洁器的拖把,从而提高清洁效率。此外,可以由用户控制水泵以排放机器人清洁器内的残留水,从而实现机器人清洁器的卫生管理。