
可以实现无线通讯的两轮自平衡电动车.pdf

宏硕****mo


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可以实现无线通讯的两轮自平衡电动车.pdf
本发明涉及一种无线通讯的两轮自平衡电动车,其特征在于,所述两轮自平衡电动车包括操纵杆、车体、车轮、电机、电路系统、电池组、客户端,所述电动车的车轮位于车辆两侧;所述操纵杆设置于两个车轮中间,所述电路系统通过检测操纵者的前后重心的变化进而通过电机控制车辆的前进和后退;所述电路系统通过检测操纵杆转动角度的变化进而通过电机控制车辆的转动,所述两轮自平衡电动车通过电路系统实现与客户端的无线通讯。本发明的有益效果如下:1)整个装置结构简单,操作方便、安全、可靠、快捷;2)该电动车可以实现客户端与车辆的无线通讯;3)

可以实现无线通讯的独轮自平衡电动车.pdf
一种无线通讯的独轮自平衡电动车,其特征在于,所述独轮自平衡电动车包括外壳、立柱、轮毂电机、轮胎、脚踏板、电路系统、灯条、电池组、辅助轮、USB接口、指示灯、开关、充电器、客户端和充电口,所述电动车的车轮位于车辆的中心;所述电路系统通过检测操纵者的前后重心的变化进而通过电机控制车辆的前进和后退;所述独轮自平衡电动车通过电路系统实现与客户端的无线通讯。本发明的有益效果如下:1)、整个装置结构简单,操作方便、安全、可靠、快捷;2)该电动车可以实现客户端与车辆的无线通讯;3)该电动车成本较低,适合大众消费者的消费

两轮自平衡电动车.pdf
本发明提出了一种新型的自平衡式的两轮电动车。有两个基本平行的、左右并排的、能独立转动的轮子。为了缩小体积与重量,省去了车架,踏脚板兼任车架的功能。踏脚板由两部分组成,它们各自能够独立地朝前或朝后倾斜;两个车轮设置在踏脚板的下方,车轮的高度低于踏脚板的上表面;两个车轮被电子自平衡控制系统所操控,使踏脚板保持前后方向上的水平平衡。站立在踏脚板上的驾车者,只要改变其重心即可操控车子朝前、朝后或转向行进了。因此,该种两轮电动车不仅操纵灵活、运行稳定,而且特别轻便、易于携带,可以在多种领域内得到应用。
自平衡的两轮电动车.pdf
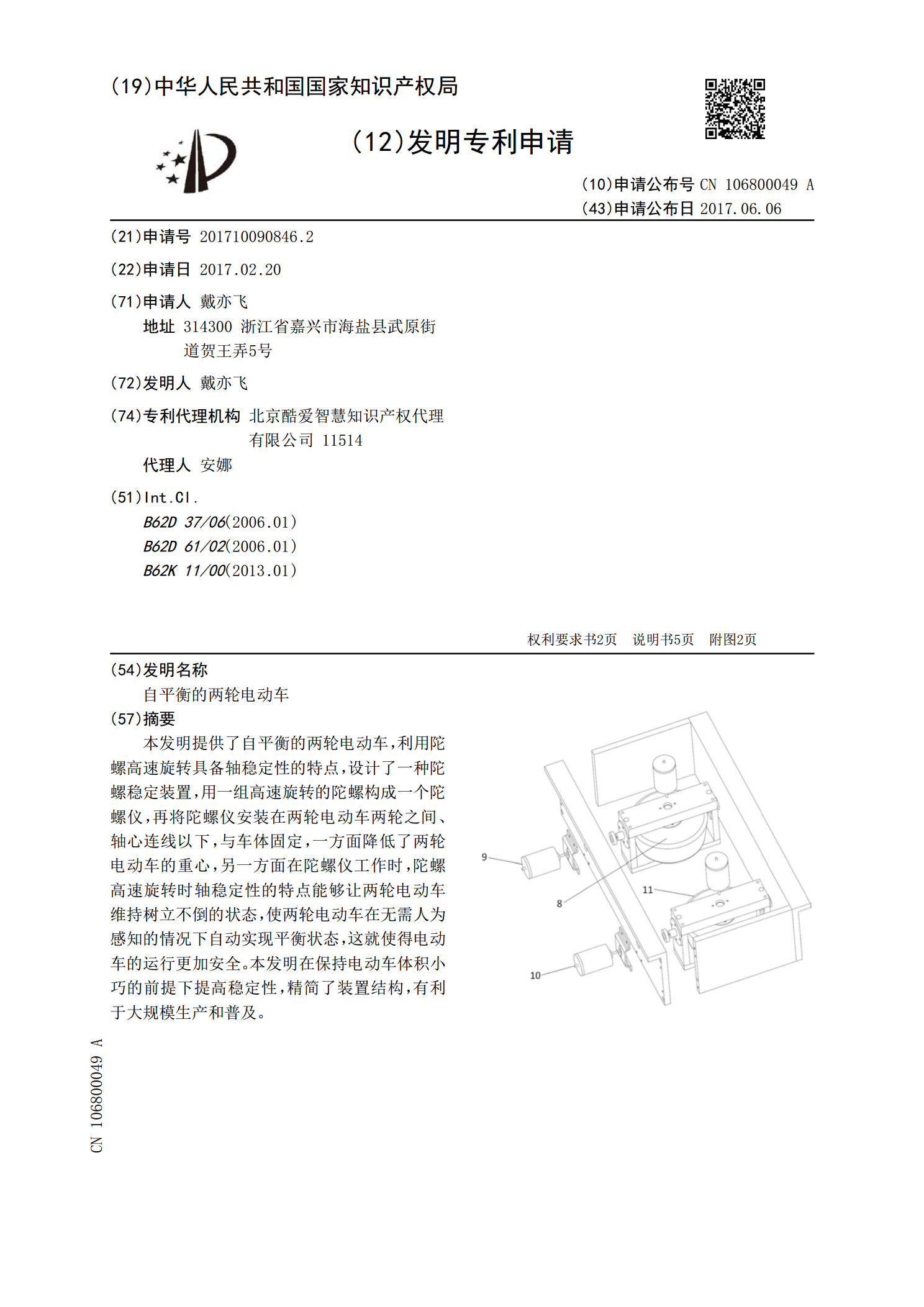
本发明提供了自平衡的两轮电动车,利用陀螺高速旋转具备轴稳定性的特点,设计了一种陀螺稳定装置,用一组高速旋转的陀螺构成一个陀螺仪,再将陀螺仪安装在两轮电动车两轮之间、轴心连线以下,与车体固定,一方面降低了两轮电动车的重心,另一方面在陀螺仪工作时,陀螺高速旋转时轴稳定性的特点能够让两轮电动车维持树立不倒的状态,使两轮电动车在无需人为感知的情况下自动实现平衡状态,这就使得电动车的运行更加安全。本发明在保持电动车体积小巧的前提下提高稳定性,精简了装置结构,有利于大规模生产和普及。

两轮自平衡电动车.pdf
本发明提出了一种新型的两轮自平衡电动车,其特点是设有两个彼此并排的、能独立转动的轮子。有一个连接机构使两个轮子相连,该连接机构能使两个轮子一致地朝左或朝右倾侧。两个轮子的倾侧,能使车子转弯。当两个轮子倾侧时,该连接机构仍能使踏脚板,保持水平位置。每个轮子各自有一个电动机驱动,还设有具有电子控制系统,该控制系统使得车子的踏脚板,能保持前后方向的水平平衡。骑车人将其重心向前、后、或两侧倾斜,就可直接使车子朝倾侧的方向前进。此外,本发明还进一步提供了一些提高车子稳定性与便携性的设计。