
用于控制工程机械的方法和工程机械.pdf

努力****弘毅


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制工程机械的方法和工程机械.pdf
本发明涉及一种用于控制工程机械(1)的方法。该工程机械包括:前车身部分(2),该前车身部分(2)具有车架(7)和布置在前轮几何轴线(16)上的一对车轮(8a、8b);以及后车身部分(4),该后车身部分(4)具有车架(9)、布置在第一后轮几何轴线(18)上的一对车轮(10a、10b)、以及布置在位于第一后轮轴线(18)后方的第二后轮几何轴线(19)上的一对车轮(11a、11b)。前车身部分(2)和后车身部分(4)彼此以可枢转的方式连接,以绕大致竖直枢转轴线(13)枢转。从前轮几何轴线(16)到竖直枢转轴线(
用于工程机械的装置及通信方法、控制器和工程机械.pdf
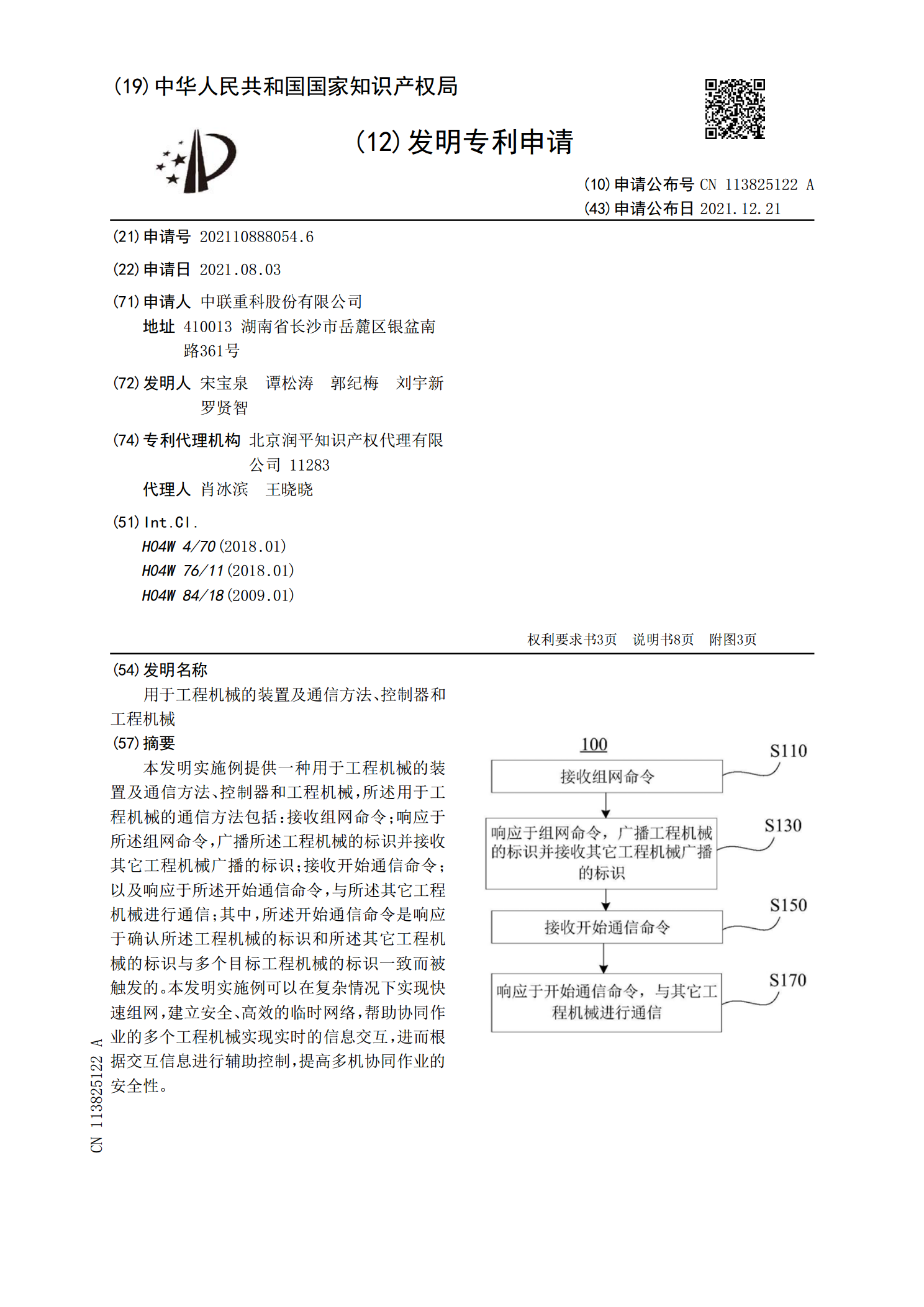
本发明实施例提供一种用于工程机械的装置及通信方法、控制器和工程机械,所述用于工程机械的通信方法包括:接收组网命令;响应于所述组网命令,广播所述工程机械的标识并接收其它工程机械广播的标识;接收开始通信命令;以及响应于所述开始通信命令,与所述其它工程机械进行通信;其中,所述开始通信命令是响应于确认所述工程机械的标识和所述其它工程机械的标识与多个目标工程机械的标识一致而被触发的。本发明实施例可以在复杂情况下实现快速组网,建立安全、高效的临时网络,帮助协同作业的多个工程机械实现实时的信息交互,进而根据交互信息进行
用于工程机械的控制系统、方法及工程机械.pdf
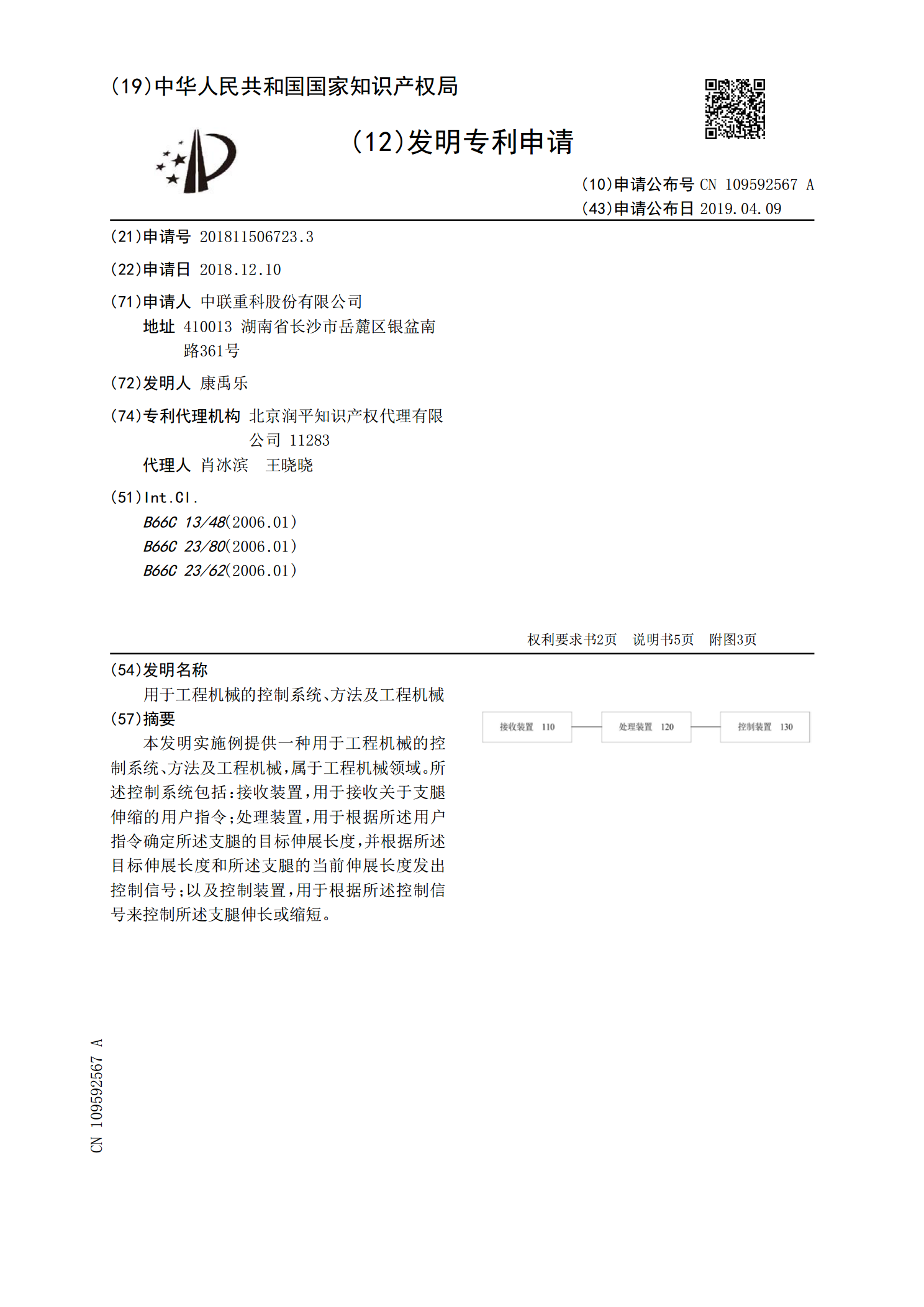
本发明实施例提供一种用于工程机械的控制系统、方法及工程机械,属于工程机械领域。所述控制系统包括:接收装置,用于接收关于支腿伸缩的用户指令;处理装置,用于根据所述用户指令确定所述支腿的目标伸展长度,并根据所述目标伸展长度和所述支腿的当前伸展长度发出控制信号;以及控制装置,用于根据所述控制信号来控制所述支腿伸长或缩短。

工程机械和用于操作工程机械的方法.pdf
本发明涉及一种工程机械(1),包括:原动机(11),该原动机(11)用于向所述工程机械的驱动轮(12)提供扭矩;以及传动系(13),该传动系(13)布置在原动机(11)和驱动轮(12)之间,用于将扭矩从所述原动机传递到所述驱动轮。传动系(13)包括布置在所述原动机和所述车轮之间的变速箱(14),并且工程机械(1)还包括:液压系统中的至少一个液压机械(15),该至少一个液压机械(15)用于使布置在所述工程机械上的器具(2)移动和/或用于使所述工程机械转向;以及电机(16),该电机(16)用于驱动或制动所述驱

工程机械防倾翻控制方法、装置和工程机械.pdf
本发明提供一种工程机械防倾翻控制方法、装置和工程机械,属于工程机械领域,该工程机械包括四个支腿,该方法包括:检测所述工程机械的四个支腿的支腿反力;根据所述工程机械的安全裕度系数和所述四个支腿的最大设定支腿反力计算防倾翻阈值;以及根据所述四个支腿的支腿反力和所述防倾翻阈值控制所述工程机械的调整姿态的运行动作。该工程机械防倾翻控制方法、装置和工程机械可以精确地实现工程机械在任意姿态下的防倾翻安全防护。