
工程机械防倾翻控制方法、装置和工程机械.pdf

秋花****姐姐

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工程机械防倾翻控制方法、装置和工程机械.pdf
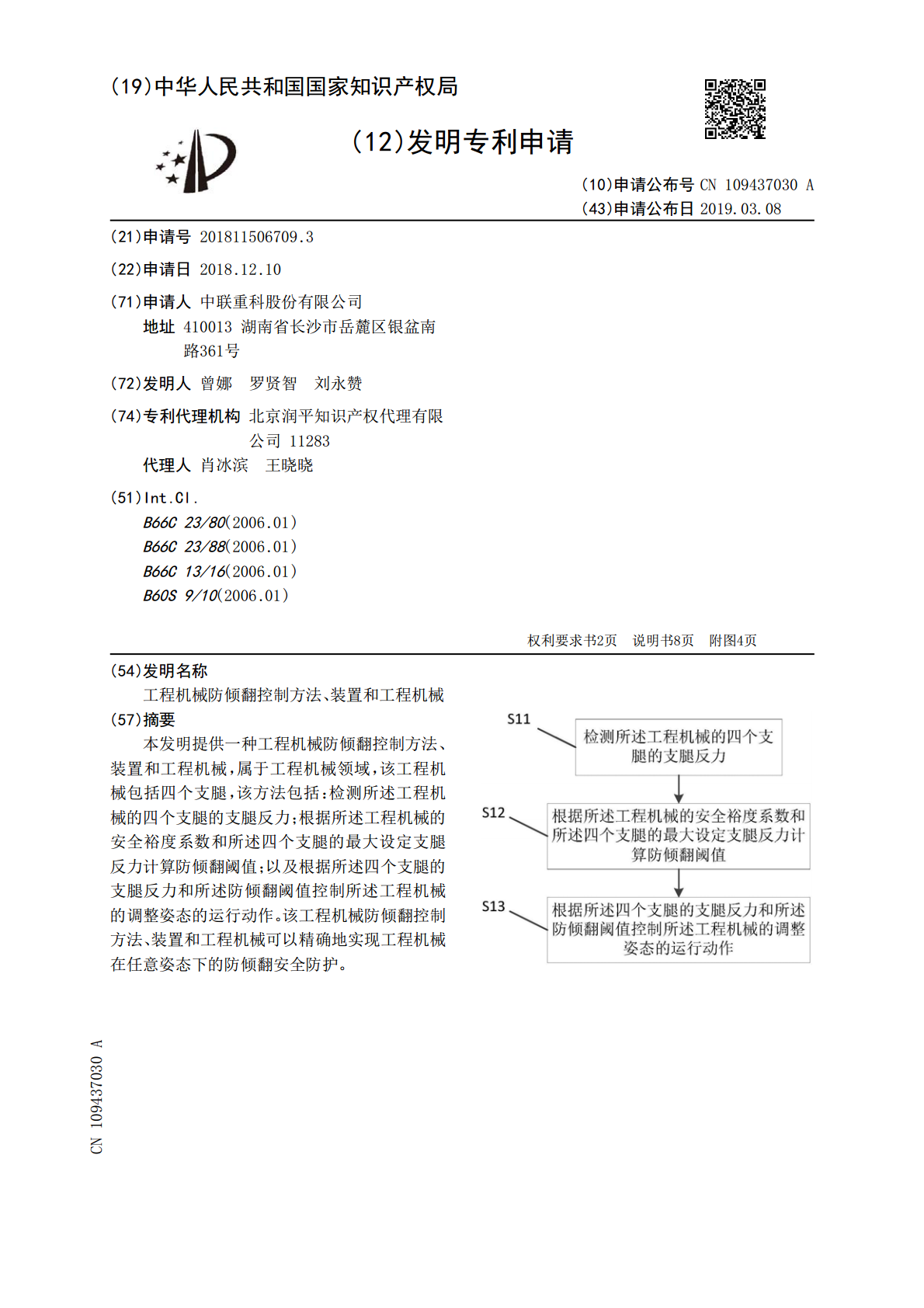
本发明提供一种工程机械防倾翻控制方法、装置和工程机械,属于工程机械领域,该工程机械包括四个支腿,该方法包括:检测所述工程机械的四个支腿的支腿反力;根据所述工程机械的安全裕度系数和所述四个支腿的最大设定支腿反力计算防倾翻阈值;以及根据所述四个支腿的支腿反力和所述防倾翻阈值控制所述工程机械的调整姿态的运行动作。该工程机械防倾翻控制方法、装置和工程机械可以精确地实现工程机械在任意姿态下的防倾翻安全防护。
防倾翻装置、工程机械及防倾翻的方法.pdf
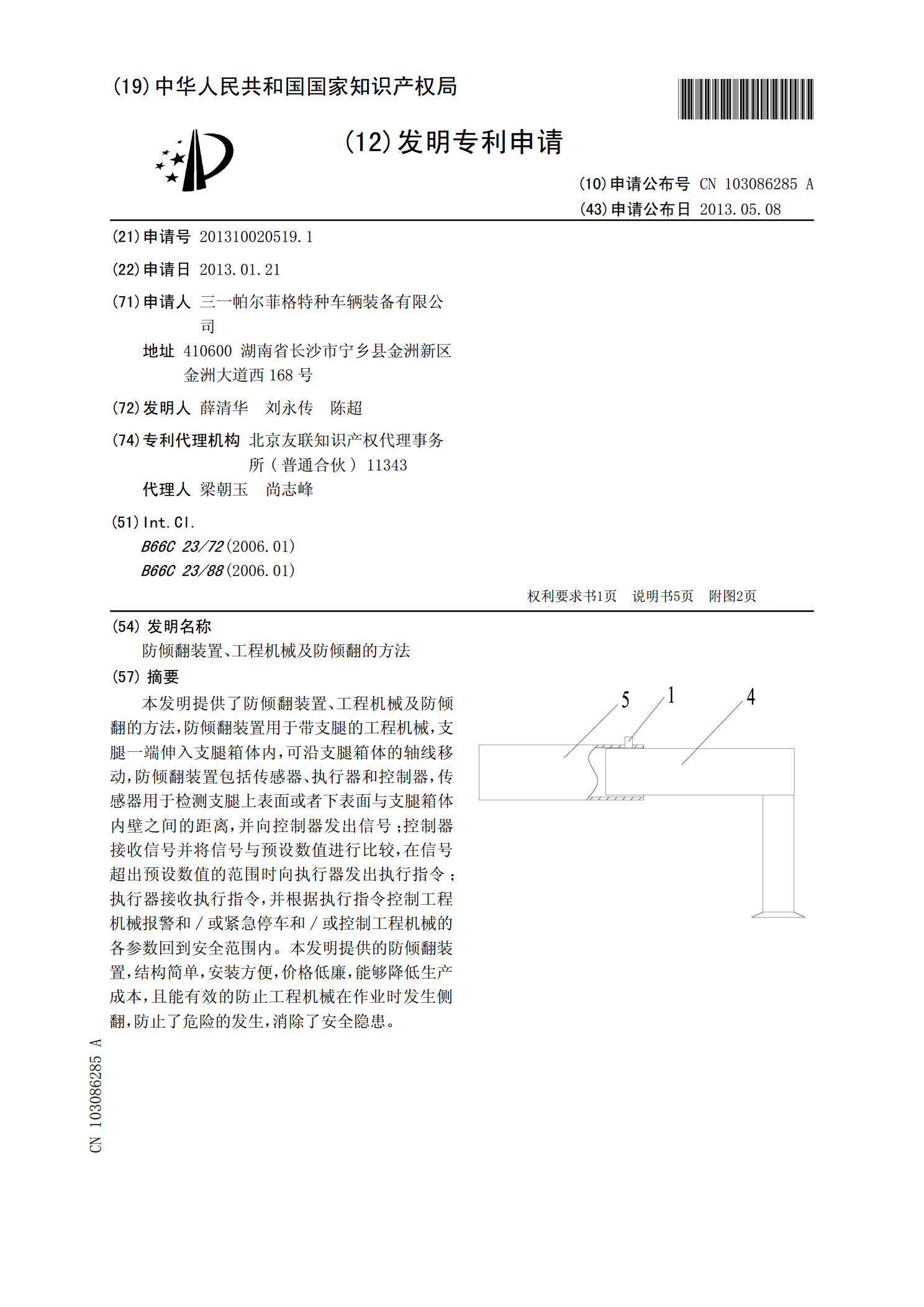
本发明提供了防倾翻装置、工程机械及防倾翻的方法,防倾翻装置用于带支腿的工程机械,支腿一端伸入支腿箱体内,可沿支腿箱体的轴线移动,防倾翻装置包括传感器、执行器和控制器,传感器用于检测支腿上表面或者下表面与支腿箱体内壁之间的距离,并向控制器发出信号;控制器接收信号并将信号与预设数值进行比较,在信号超出预设数值的范围时向执行器发出执行指令;执行器接收执行指令,并根据执行指令控制工程机械报警和/或紧急停车和/或控制工程机械的各参数回到安全范围内。本发明提供的防倾翻装置,结构简单,安装方便,价格低廉,能够降低生产成

倾翻控制方法、装置、系统和工程机械.pdf
本发明公开一种倾翻控制方法、装置、系统和工程机械。该方法包括:确定工程机械的当前倾翻判定线,其中,当前倾翻判定线包括工程机械的倾翻线中的至少一条,所述倾翻线为工程机械各支撑点之间的连线;确定工程机械相对于当前倾翻判定线的当前倾翻系数;通过比较当前倾翻系数和倾翻预警阈值,判断工程机械是否处于倾翻危险状态。本发明可以及时有效地提醒驾驶员小心驾驶,降低翻车事故发生的可能性;同时本发明操作简单、控制可靠,驾驶人员通过本发明能实时掌握车辆的支撑状态,能更好地感知车辆,从而更好地控制车辆,避免危险的发生。
防倾翻装置及工程机械.pdf
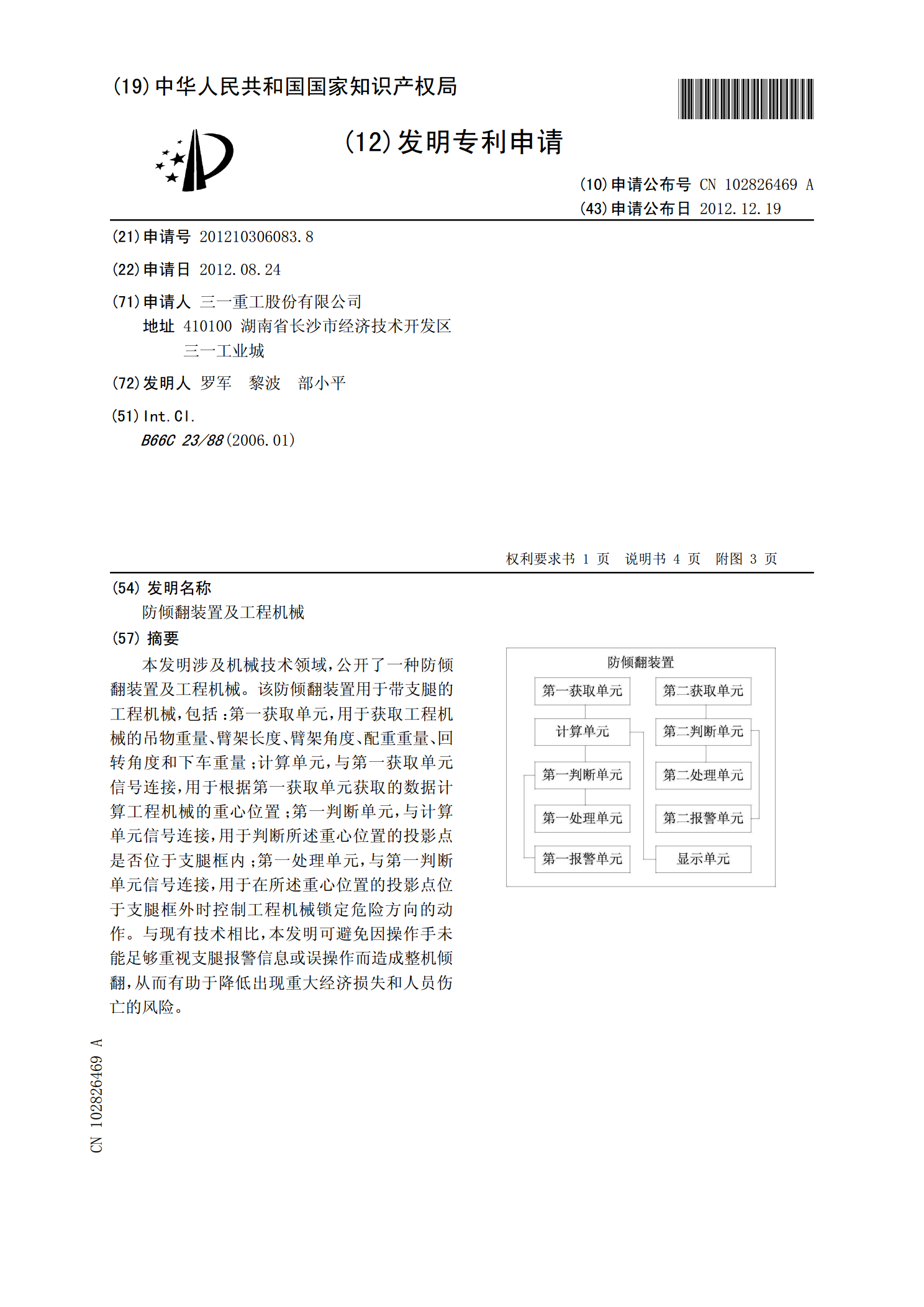
本发明涉及机械技术领域,公开了一种防倾翻装置及工程机械。该防倾翻装置用于带支腿的工程机械,包括:第一获取单元,用于获取工程机械的吊物重量、臂架长度、臂架角度、配重重量、回转角度和下车重量;计算单元,与第一获取单元信号连接,用于根据第一获取单元获取的数据计算工程机械的重心位置;第一判断单元,与计算单元信号连接,用于判断所述重心位置的投影点是否位于支腿框内;第一处理单元,与第一判断单元信号连接,用于在所述重心位置的投影点位于支腿框外时控制工程机械锁定危险方向的动作。与现有技术相比,本发明可避免因操作手未能足够

一种防工程机械倾翻的控制方法及控制装置.pdf
本发明公开了一种防工程机械倾翻的控制方法及控制装置,包括底部配重座、支撑底座、减震器、防倾翻顶轴、移动滚轮、液压支架、支撑背板,所述顶部支撑横梁上方安装有所述移动滚轮,所述移动滚轮上方安装有所述液压支架,所述支撑背板下方安装有连接固定垫片,所述连接固定垫片下方安装有电液推杆,所述电液推杆下方安装有主支撑架,所述支撑底座外侧安装有操作控制箱,所述操作控制箱下方安装有底部支撑横梁。有益效果在于:能够对工程机械承重与倾斜角度进行测量,有效避免了工程机械在使用时侧翻的问题,避免了安全事故的发生。