
一种无人驾驶车辆制动装置.pdf

斌斌****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人驾驶车辆制动装置.pdf
本发明公开一种无人驾驶车辆制动装置,行车制动驱动组件中的第一壳体上装有行车制动电机,行车制动电机的输出轴固定有第一蜗杆,第一蜗轮与第一蜗杆常啮合;齿条后部与齿轮常啮合,齿条前端部通过力传感器与制动油缸的活塞杆同轴固定;制动油缸两个出油端分别通过一根制动油管与对应的一个制动钳进油端相连;驻车制动驱动组件中的车驱动壳体内装有第二蜗杆、第二蜗轮和绕线器,第二蜗杆与驻车制动电机的输出轴同轴固定;第二蜗轮与第二蜗杆常啮合;绕线器上绕有两根驻车拉索,这两根驻车拉索分别与对应一个制动钳上的驻车拐臂相连,每根驻车拉索外活

一种无人驾驶车辆的制动装置.pdf
本发明涉及一种无人驾驶车辆的制动装置。该装置包括电机、减速器、编码器和传感机构;减速器为蜗轮蜗杆减速器,其输入端连接着电机,电机的后端输出轴上连接着编码器;减速器输出轴的一端连接着传感器触头,其另一端连接着扭矩传感器,扭矩传感器的另一端连接着绕设有钢线的线轮;连接减速器壳体的传感器固定架上部两侧分别设有零位传感器和极位传感器,两传感器的触头分别位于传感器触头的圆形运动轨迹内侧。本发明采用蜗轮蜗杆机构能有效的使车辆保持处于制动状态;限位传感器和扭矩限制器实现有效制动以及保证车辆的安全;钢线保证了无人驾驶模式
一种无人驾驶车辆的踏板装置及制动装置.pdf
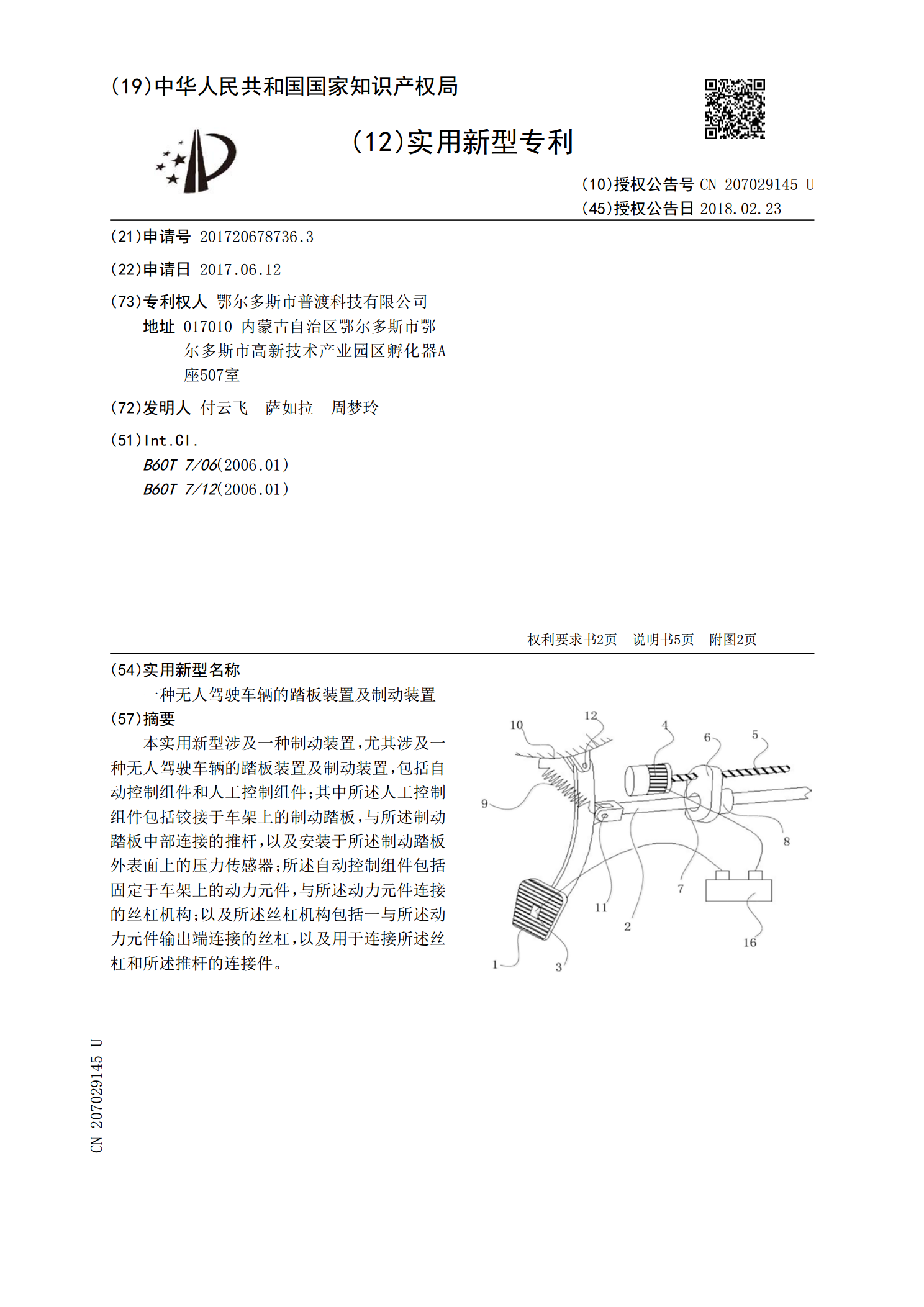
本实用新型涉及一种制动装置,尤其涉及一种无人驾驶车辆的踏板装置及制动装置,包括自动控制组件和人工控制组件;其中所述人工控制组件包括铰接于车架上的制动踏板,与所述制动踏板中部连接的推杆,以及安装于所述制动踏板外表面上的压力传感器;所述自动控制组件包括固定于车架上的动力元件,与所述动力元件连接的丝杠机构;以及所述丝杠机构包括一与所述动力元件输出端连接的丝杠,以及用于连接所述丝杠和所述推杆的连接件。

一种无人驾驶汽车制动装置用的踏板装置及制动装置.pdf
本实用新型涉及无人驾驶技术领域,尤其涉及一种无人驾驶汽车制动装置用的踏板装置及制动装置,包括制动踏板机构,以及与所述制动踏板机构连接的自动控制机构;其中所述制动踏板机构包括踏板本体,与所述踏板本体连接的且铰接于车架上的踏板连接杆,设于所述踏板连接杆上端部的踏板转轴,以及设于所述踏板本体表面的压力传感器;所述自动控制机构包括与所述踏板转轴连接的通断部件,与所述通断部件另一端连接的传动部件,以及固定于所述车架上的与所述传动部件连接的动力元件。

一种电制动装置、车辆制动系统及车辆.pdf
本发明涉及一种电制动装置、车辆制动系统及车辆,基体上往复地活动装配有用于与制动车轮的制动机构传动连接的制动件,制动件在其往复活动行程上具有向前以驱动制动机构进行制动操作的制动行程,基体上设有可驱动制动件往复活动的电机,基体上还设有蓄能驻车弹簧,蓄能驻车弹簧具有用于由电机驱动向后移动的制动件驱动变形储能的储能行程,还具有用于在需要驻车制动时电机驱动制动件向前缓冲以实现驻车制动的释放行程。本发明不仅可满足驻车制动要求,而且可满足不同行车制动模式的要求,另外兼有自动起、停驻车功能,起到良好的制动效果,提高了车辆