
一种旋转式可调刚度串联弹性机器人关节.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种旋转式可调刚度串联弹性机器人关节.pdf
一种旋转式可调刚度串联弹性机器人关节,它涉及一种机器人关节,以解决现有机器人关节存在难以实现精确的力输出控制以及传动精度和传动稳定性较差的问题,它包括谐波减速器;它还包括带有编码器的电机、支撑罩、端盖、立式输出臂、传动轴、机箱、角度传感器、立式连接板和多个串联弹性体;带有编码器的电机与钢轮可拆卸连接,钢轮与支撑壳可拆卸连接,带有编码器的盘式电机的输出轴与波形发生器连接,柔轮的小直径端装在支撑罩内且二者转动连接,柔轮的小直径端内安装有立式连接板,机箱位于支撑罩和端盖之间,机箱内安装有多个串联弹性体;传动轴的

一种变刚度机器人弹性关节.pdf
本发明公开的一种变刚度机器人弹性关节,由外壳、轴和外圈组成,轴设置于外壳的回转中心,与外壳之间固定,外壳与外圈之间为转动副连接;外圈上安装有多个弹簧片,每个弹簧片一端与外圈固联,另一端与轴固联;弹簧片中间均安装有一个活动卡爪,与弹簧片之间为滑动连接,活动卡爪底部与齿盘之间为螺旋传动连接;齿盘底部设置有端面齿,与伞齿之间构成齿轮传动连接;轴穿过齿盘的旋转中心,与齿盘之间为转动副连接;伞齿径向穿过外壳,且外壳之间为转动副连接。本发明的一种变刚度机器人弹性关节克服现有结构相对复杂,变刚度特性差等问题,提供一种结
一种紧凑型可变刚度串联弹性驱动关节.pdf
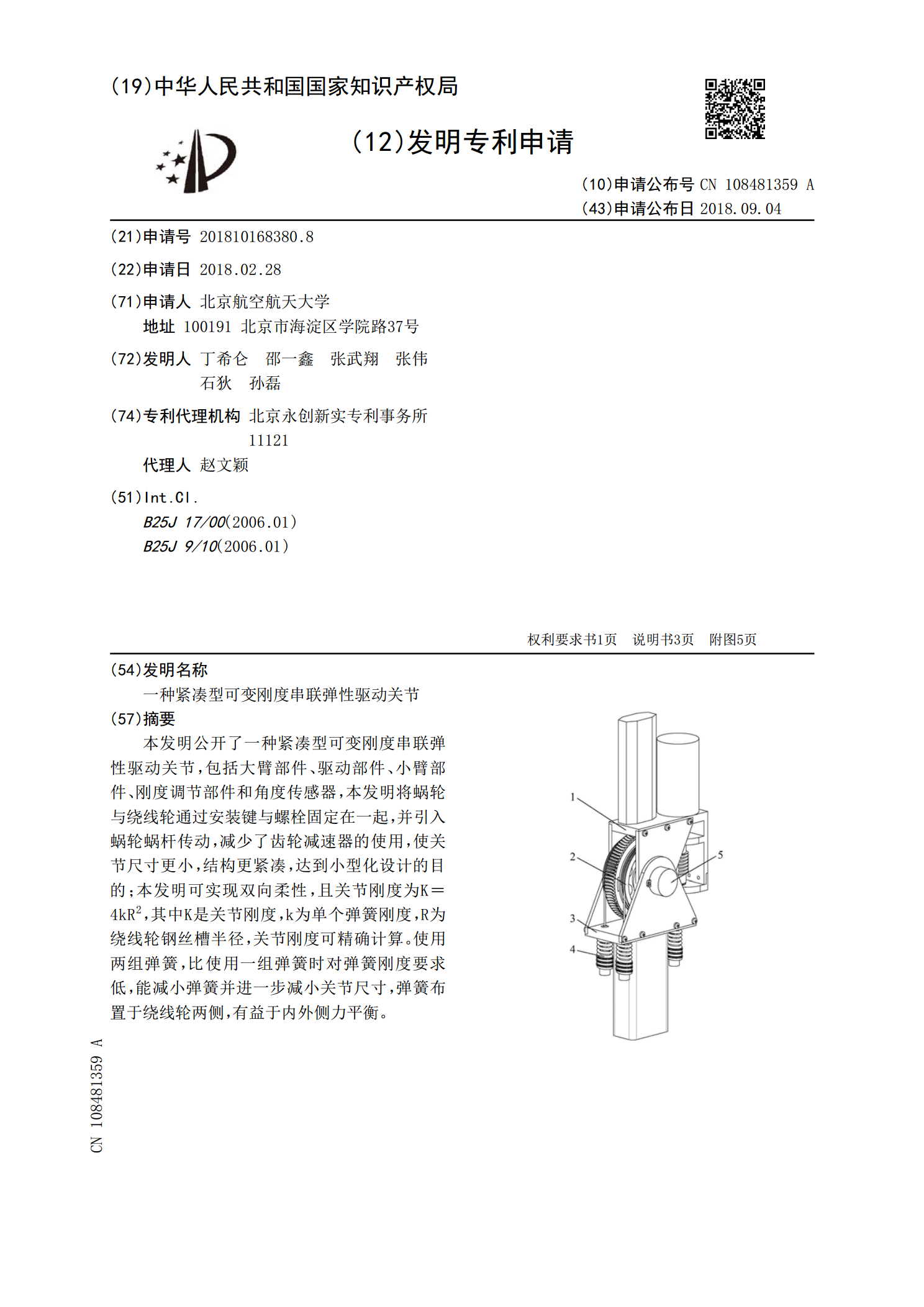
本发明公开了一种紧凑型可变刚度串联弹性驱动关节,包括大臂部件、驱动部件、小臂部件、刚度调节部件和角度传感器,本发明将蜗轮与绕线轮通过安装键与螺栓固定在一起,并引入蜗轮蜗杆传动,减少了齿轮减速器的使用,使关节尺寸更小,结构更紧凑,达到小型化设计的目的;本发明可实现双向柔性,且关节刚度为K=4kR

串联弹性关节控制与交互刚度辨识综述报告.docx
串联弹性关节控制与交互刚度辨识综述报告概述近年来,随着机器人技术的不断发展,对机器人控制和识别技术的需求也越来越高。从控制的角度来看,机器人的关节控制至关重要。在现代机器人中,常采用串联弹性关节控制方法来实现精确的运动控制。然而,系统中的交互刚度也需要进行准确测量和辨识,以确保机器人的运动能够更好地满足任务要求。本文将对串联弹性关节控制方法和交互刚度辨识技术进行综述,以帮助读者更好地了解机器人控制和识别技术的相关信息。串联弹性关节控制串联弹性关节控制技术是一种利用弹性元件在关节处建立柔性连接的控制方法。该

串联弹性驱动器及机器人关节.pdf
一种串联弹性驱动器,包括电机驱动组、传动组、驱动器输出组、第一传感器、第二传感器,所述传动组包括形成绳传动关系的主动回转机构、从动回转机构及柔索,所述主动回转机构可在所述电机驱动组驱动下实现旋转运动,所述主动回转机构的旋转中心轴与所述从动回转机构的旋转中心轴垂直,所述柔索分别紧绕于所述主动回转机构与所述从动回转机构的回转表面上;一种机器人关节包括第一关节部及第二关节部,所述第一关节部包括所述串联弹性驱动器,所述串联弹性驱动器与所述第二关节部连接。本发明提供了一种结构紧凑、传动可靠的串联弹性驱动器及机器人关