
串联弹性驱动器及机器人关节.pdf

纪阳****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

串联弹性驱动器及机器人关节.pdf
一种串联弹性驱动器,包括电机驱动组、传动组、驱动器输出组、第一传感器、第二传感器,所述传动组包括形成绳传动关系的主动回转机构、从动回转机构及柔索,所述主动回转机构可在所述电机驱动组驱动下实现旋转运动,所述主动回转机构的旋转中心轴与所述从动回转机构的旋转中心轴垂直,所述柔索分别紧绕于所述主动回转机构与所述从动回转机构的回转表面上;一种机器人关节包括第一关节部及第二关节部,所述第一关节部包括所述串联弹性驱动器,所述串联弹性驱动器与所述第二关节部连接。本发明提供了一种结构紧凑、传动可靠的串联弹性驱动器及机器人关

下肢助行外骨骼髋关节串联弹性驱动器弹性单元优化设计研究.docx
下肢助行外骨骼髋关节串联弹性驱动器弹性单元优化设计研究标题:下肢助行外骨骼髋关节串联弹性驱动器弹性单元优化设计研究摘要:随着人口老龄化和越来越多人类在行动受限的条件下生活,下肢助行外骨骼技术逐渐成为改善生活质量的重要手段。其中,髋关节是外骨骼的关键部位之一。本研究旨在优化髋关节弹性单元的设计,以提高外骨骼的助行性能和稳定性。研究方法主要包括髋关节运动分析、弹性单元优化设计以及性能测试与分析。通过本研究的结果,我们可为下肢助行外骨骼的设计与改进提供有价值的参考。关键词:下肢助行外骨骼,髋关节,串联弹性驱动器

串联弹性驱动器的控制策略应用于工业机器人.docx
串联弹性驱动器的控制策略应用于工业机器人标题:弹性驱动器在工业机器人中的控制策略应用摘要:随着机器人技术的不断发展,工业机器人在生产线上的应用越来越广泛。而传统的刚性驱动器在某些应用中存在一些限制,如精确度、安全性和动态性等方面。相比之下,弹性驱动器具有较高的安全性、精确度和动态性能。本文通过对弹性驱动器在工业机器人中的控制策略应用进行研究,旨在探讨弹性驱动器在工业机器人中的潜在应用和优势。第一部分:介绍1.研究背景和意义2.弹性驱动器的基本原理和特点3.工业机器人的现状和存在问题第二部分:弹性驱动器在工

基于压簧的线性串联弹性驱动器.pdf
本发明为一种基于压簧的线性弹性驱动器,包括编码器、伺服电机、驱动器底座、联轴器、轴承、轴承滚动底盘、压簧、铜柱、压簧固定顶板和底板、输出轴和负载连接单元,编码器与驱动输出轴相连测量负载端转动的角度,伺服电机的法兰盘与轴承滚动底盘相连,轴承滚动底盘上加工线性轨道,使得驱动器输出力矩和电机与负载间相对转角呈线性关系。压簧固定底板上开有间隔120°的三个螺纹孔,每个螺纹孔处分别安装铜柱,并将压簧套装在铜柱上,负载连接单元留置负载安装孔。本发明是一种新型的高能量密度、线性化的弹性驱动器,为设计一种具有本质安全特性
一种串联弹性驱动器.pdf
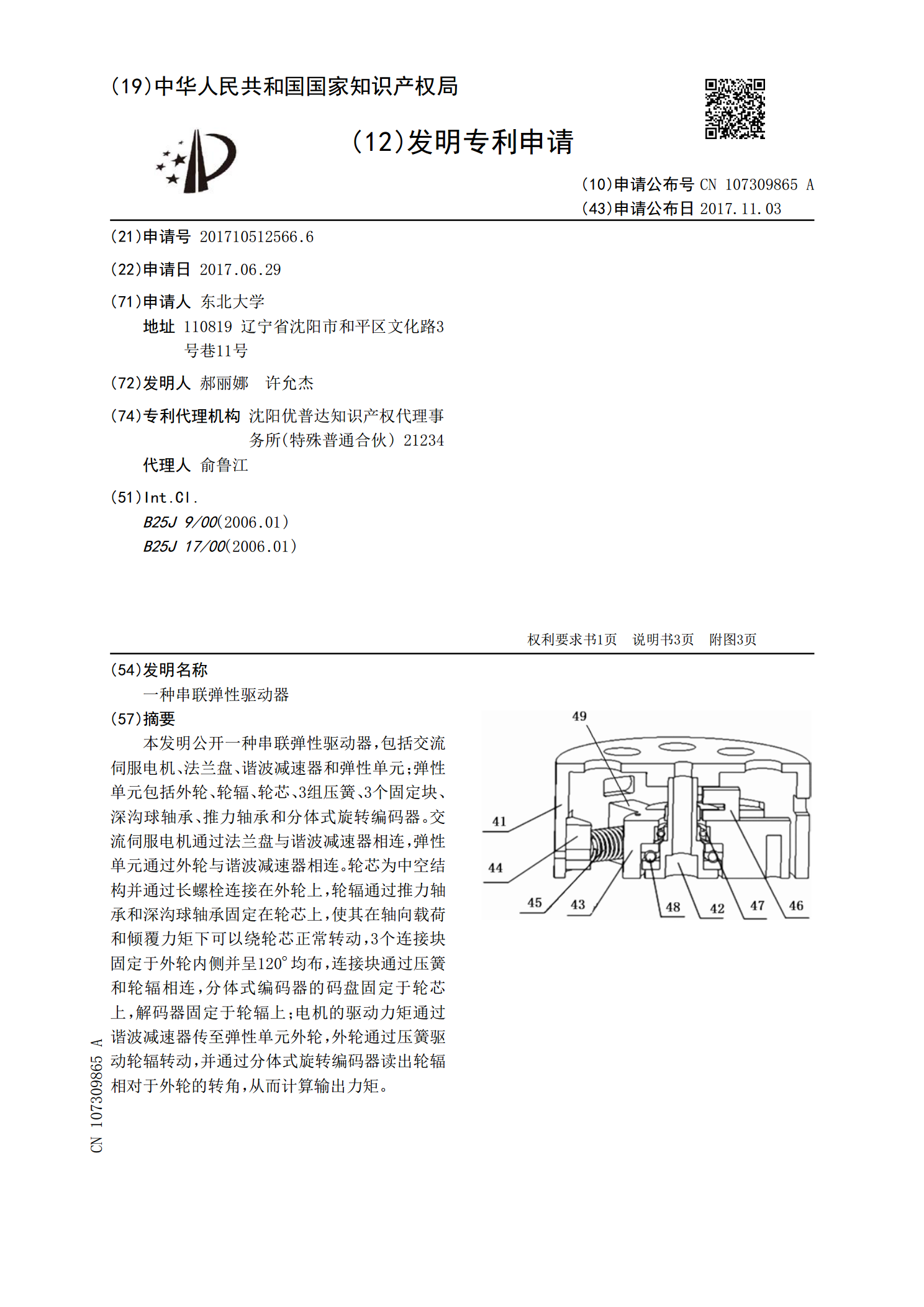
本发明公开一种串联弹性驱动器,包括交流伺服电机、法兰盘、谐波减速器和弹性单元;弹性单元包括外轮、轮辐、轮芯、3组压簧、3个固定块、深沟球轴承、推力轴承和分体式旋转编码器。交流伺服电机通过法兰盘与谐波减速器相连,弹性单元通过外轮与谐波减速器相连。轮芯为中空结构并通过长螺栓连接在外轮上,轮辐通过推力轴承和深沟球轴承固定在轮芯上,使其在轴向载荷和倾覆力矩下可以绕轮芯正常转动,3个连接块固定于外轮内侧并呈120°均布,连接块通过压簧和轮辐相连,分体式编码器的码盘固定于轮芯上,解码器固定于轮辐上;电机的驱动力矩通过