
一种气动柔性手指的板弹簧骨架模型研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种气动柔性手指的板弹簧骨架模型研究.docx
一种气动柔性手指的板弹簧骨架模型研究气动柔性手指是一种以气动力为驱动力,通过使用柔性材料及其结构设计制成的手指,具有灵活、高精度和安全性好等特点,广泛应用于机器人、医疗器械、物流等领域。在气动柔性手指中,板弹簧是一种重要的结构,它能够提供足够的柔性和稳定的支撑力,同时能够减小手指的质量和体积,提高其自由度和响应速度。因此,本文将主要探讨气动柔性手指中板弹簧骨架模型的研究。板弹簧骨架模型是一种典型的柔性机构模型,常用于气动柔性手指的制造中。该模型由若干个琴瑟板形成,每个琴瑟板由两端固定在骨架上,并通过沿横向

板(杆)弹簧骨架柔性关节的静态模型研究的任务书.docx
板(杆)弹簧骨架柔性关节的静态模型研究的任务书任务书题目:板(杆)弹簧骨架柔性关节的静态模型研究1.研究背景及意义随着机器和机械设备的不断发展,机器自动化程度不断提高,对于复杂环境下的机器人、工业机器人、机械手臂等机械设备的运动控制精度及稳定性要求更高。柔性关节是一种能够模拟人体关节运动的机械结构,可以提高机器设备的自适应性、灵活性和容错能力,广泛应用于机器人、复杂机械手臂、飞行器及医疗设备等方面。因此,对柔性关节的静态稳定性进行研究,对于提高机器设备的控制精度和稳定性具有重要意义。2.研究内容及目标本研

直线电机驱动控制的板弹簧骨架柔性手爪.pdf
本发明涉及直线电机驱动控制的板弹簧骨架柔性手爪,手爪由一个手掌和三个柔性手指组成。一个柔性手指1被安装在矩形手掌2的左侧对称中心处,另外二个柔性手指1分别被安装在矩形手掌2右侧对称中心的两侧;三个柔性手指1分别被安装在六边形手掌3的三个对应边处。每个柔性手指结构相同,主要由一个直线电机和一个板弹簧组成;作为骨架的板弹簧被分为变形段和抓取段,两段长度可相对调节;此多指手爪应用于易碎的脆性物体,或形状、大小变化的异形物体的抓持,属于机器人、机电一体化的应用技术领域;与机器人本体联接,尤其适用于食品、农产品、轻
组合式气动柔性手指.pdf
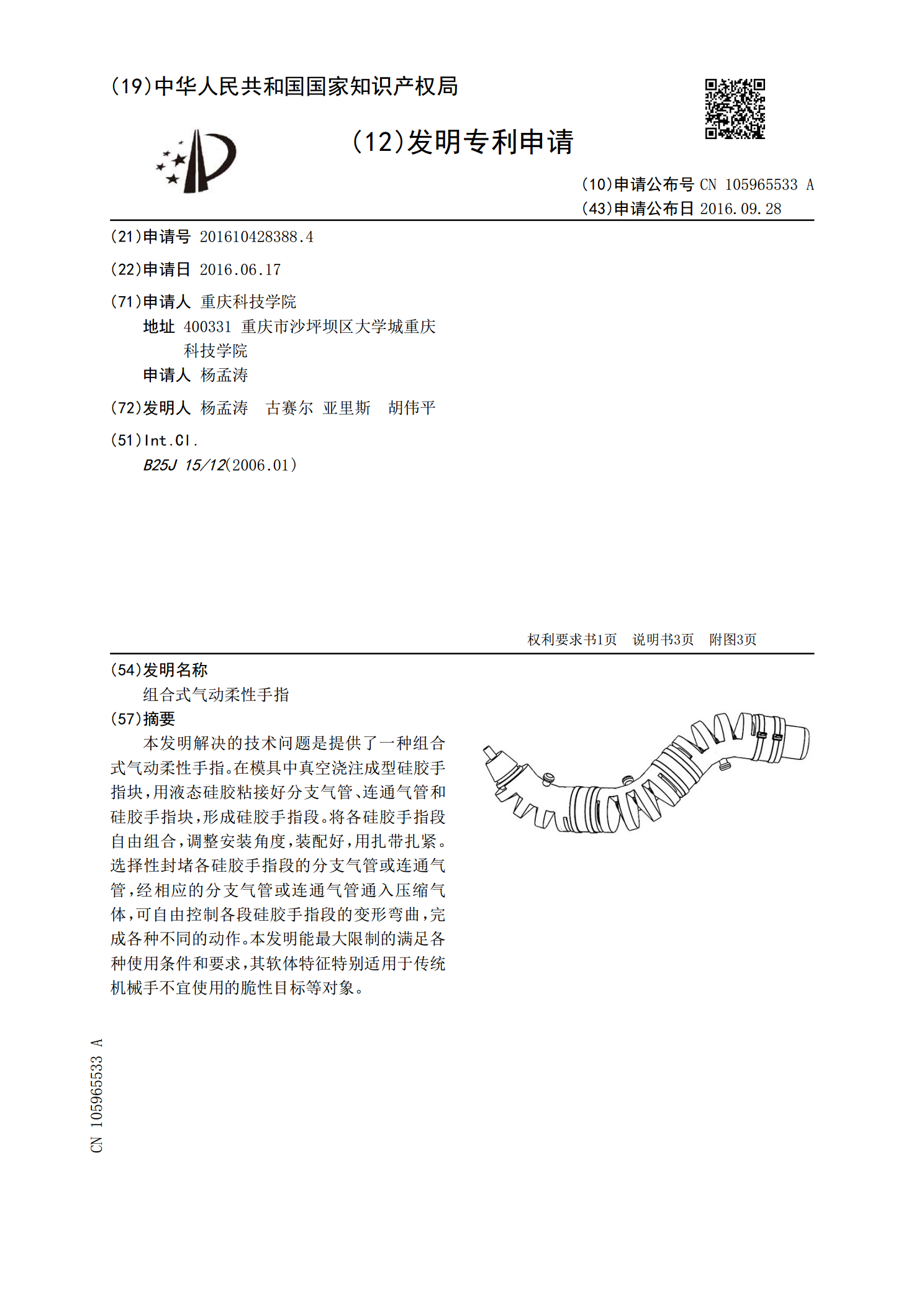
本发明解决的技术问题是提供了一种组合式气动柔性手指。在模具中真空浇注成型硅胶手指块,用液态硅胶粘接好分支气管、连通气管和硅胶手指块,形成硅胶手指段。将各硅胶手指段自由组合,调整安装角度,装配好,用扎带扎紧。选择性封堵各硅胶手指段的分支气管或连通气管,经相应的分支气管或连通气管通入压缩气体,可自由控制各段硅胶手指段的变形弯曲,完成各种不同的动作。本发明能最大限制的满足各种使用条件和要求,其软体特征特别适用于传统机械手不宜使用的脆性目标等对象。

气动柔性机械手手指运动学研究.docx
气动柔性机械手手指运动学研究气动柔性机械手手指运动学研究摘要:气动柔性机械手作为一种具有良好灵活性和适应性的机械手臂,广泛应用于工业生产中。手指作为机械手的重要组成部分,其运动学研究对于机械手的精准控制和操作有着重要的意义。本文主要对气动柔性机械手手指的运动学进行研究,探索其运动学特性和建立相应的数学模型。研究结果表明,通过合理设计气动柔性机械手手指的结构和参数,可以实现精确的运动控制和多样化的动作,提高机械手的工作效率和适应性。关键词:气动柔性机械手,手指,运动学,数学模型,运动控制1.引言气动柔性机械