
气动柔性机械手手指运动学研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气动柔性机械手手指运动学研究.docx
气动柔性机械手手指运动学研究气动柔性机械手手指运动学研究摘要:气动柔性机械手作为一种具有良好灵活性和适应性的机械手臂,广泛应用于工业生产中。手指作为机械手的重要组成部分,其运动学研究对于机械手的精准控制和操作有着重要的意义。本文主要对气动柔性机械手手指的运动学进行研究,探索其运动学特性和建立相应的数学模型。研究结果表明,通过合理设计气动柔性机械手手指的结构和参数,可以实现精确的运动控制和多样化的动作,提高机械手的工作效率和适应性。关键词:气动柔性机械手,手指,运动学,数学模型,运动控制1.引言气动柔性机械
组合式气动柔性手指.pdf
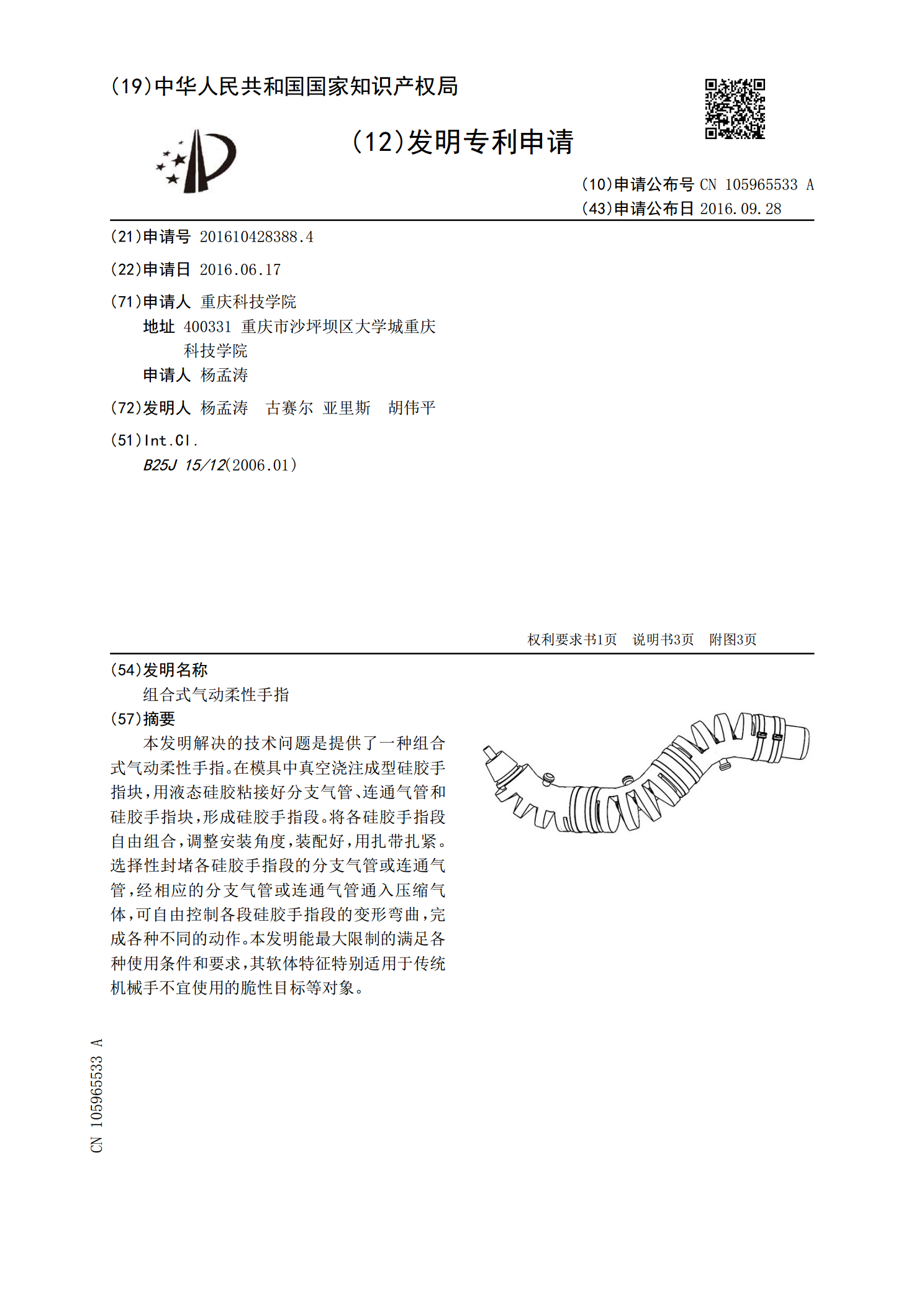
本发明解决的技术问题是提供了一种组合式气动柔性手指。在模具中真空浇注成型硅胶手指块,用液态硅胶粘接好分支气管、连通气管和硅胶手指块,形成硅胶手指段。将各硅胶手指段自由组合,调整安装角度,装配好,用扎带扎紧。选择性封堵各硅胶手指段的分支气管或连通气管,经相应的分支气管或连通气管通入压缩气体,可自由控制各段硅胶手指段的变形弯曲,完成各种不同的动作。本发明能最大限制的满足各种使用条件和要求,其软体特征特别适用于传统机械手不宜使用的脆性目标等对象。

一种气动柔性手指的板弹簧骨架模型研究.docx
一种气动柔性手指的板弹簧骨架模型研究气动柔性手指是一种以气动力为驱动力,通过使用柔性材料及其结构设计制成的手指,具有灵活、高精度和安全性好等特点,广泛应用于机器人、医疗器械、物流等领域。在气动柔性手指中,板弹簧是一种重要的结构,它能够提供足够的柔性和稳定的支撑力,同时能够减小手指的质量和体积,提高其自由度和响应速度。因此,本文将主要探讨气动柔性手指中板弹簧骨架模型的研究。板弹簧骨架模型是一种典型的柔性机构模型,常用于气动柔性手指的制造中。该模型由若干个琴瑟板形成,每个琴瑟板由两端固定在骨架上,并通过沿横向

气动机械手柔性导轨的仿真与分析.docx
气动机械手柔性导轨的仿真与分析气动机械手柔性导轨的仿真与分析摘要:本文以气动机械手的柔性导轨为研究对象,结合有限元仿真和力学分析的方法,对其进行了仿真与分析。首先,针对柔性导轨的工作环境与运动特性进行了分析,确定了有限元仿真的基本模型。其次,在ANSYSWorkbench中对机械手进行了有限元仿真。通过对应变形图、应力云图等结果的分析,确定了柔性导轨在不同工况下的变形和应力状态。最后,根据分析结果,提出了柔性导轨的优化设计思路,以及在实际应用中的注意事项。关键词:气动机械手;柔性导轨;有限元仿真;力学分析

气动机械手柔性导轨的仿真与分析.docx
气动机械手柔性导轨的仿真与分析气动机械手柔性导轨的仿真与分析摘要:随着工业自动化的发展,气动机械手在工业生产中的应用越来越广泛。然而,传统的机械手在操作过程中存在刚性不足、稳定性差等问题。为了解决这些问题,本文提出了一种基于柔性导轨的气动机械手设计方案,并进行了仿真与分析。通过建立仿真模型,对气动机械手的刚度、稳定性、精度等性能进行了分析。仿真结果表明,采用柔性导轨的气动机械手在操作过程中能够更好地保持稳定性,并且具有更高的刚度和精度。关键词:气动机械手,柔性导轨,仿真,分析第一章引言1.1研究背景随着工