
直线电机驱动控制的板弹簧骨架柔性手爪.pdf

岚风****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

直线电机驱动控制的板弹簧骨架柔性手爪.pdf
本发明涉及直线电机驱动控制的板弹簧骨架柔性手爪,手爪由一个手掌和三个柔性手指组成。一个柔性手指1被安装在矩形手掌2的左侧对称中心处,另外二个柔性手指1分别被安装在矩形手掌2右侧对称中心的两侧;三个柔性手指1分别被安装在六边形手掌3的三个对应边处。每个柔性手指结构相同,主要由一个直线电机和一个板弹簧组成;作为骨架的板弹簧被分为变形段和抓取段,两段长度可相对调节;此多指手爪应用于易碎的脆性物体,或形状、大小变化的异形物体的抓持,属于机器人、机电一体化的应用技术领域;与机器人本体联接,尤其适用于食品、农产品、轻

一种气动柔性手指的板弹簧骨架模型研究.docx
一种气动柔性手指的板弹簧骨架模型研究气动柔性手指是一种以气动力为驱动力,通过使用柔性材料及其结构设计制成的手指,具有灵活、高精度和安全性好等特点,广泛应用于机器人、医疗器械、物流等领域。在气动柔性手指中,板弹簧是一种重要的结构,它能够提供足够的柔性和稳定的支撑力,同时能够减小手指的质量和体积,提高其自由度和响应速度。因此,本文将主要探讨气动柔性手指中板弹簧骨架模型的研究。板弹簧骨架模型是一种典型的柔性机构模型,常用于气动柔性手指的制造中。该模型由若干个琴瑟板形成,每个琴瑟板由两端固定在骨架上,并通过沿横向

板(杆)弹簧骨架柔性关节的静态模型研究的任务书.docx
板(杆)弹簧骨架柔性关节的静态模型研究的任务书任务书题目:板(杆)弹簧骨架柔性关节的静态模型研究1.研究背景及意义随着机器和机械设备的不断发展,机器自动化程度不断提高,对于复杂环境下的机器人、工业机器人、机械手臂等机械设备的运动控制精度及稳定性要求更高。柔性关节是一种能够模拟人体关节运动的机械结构,可以提高机器设备的自适应性、灵活性和容错能力,广泛应用于机器人、复杂机械手臂、飞行器及医疗设备等方面。因此,对柔性关节的静态稳定性进行研究,对于提高机器设备的控制精度和稳定性具有重要意义。2.研究内容及目标本研
基于SMA弹簧驱动的柔性机器臂切换控制方法及系统.pdf
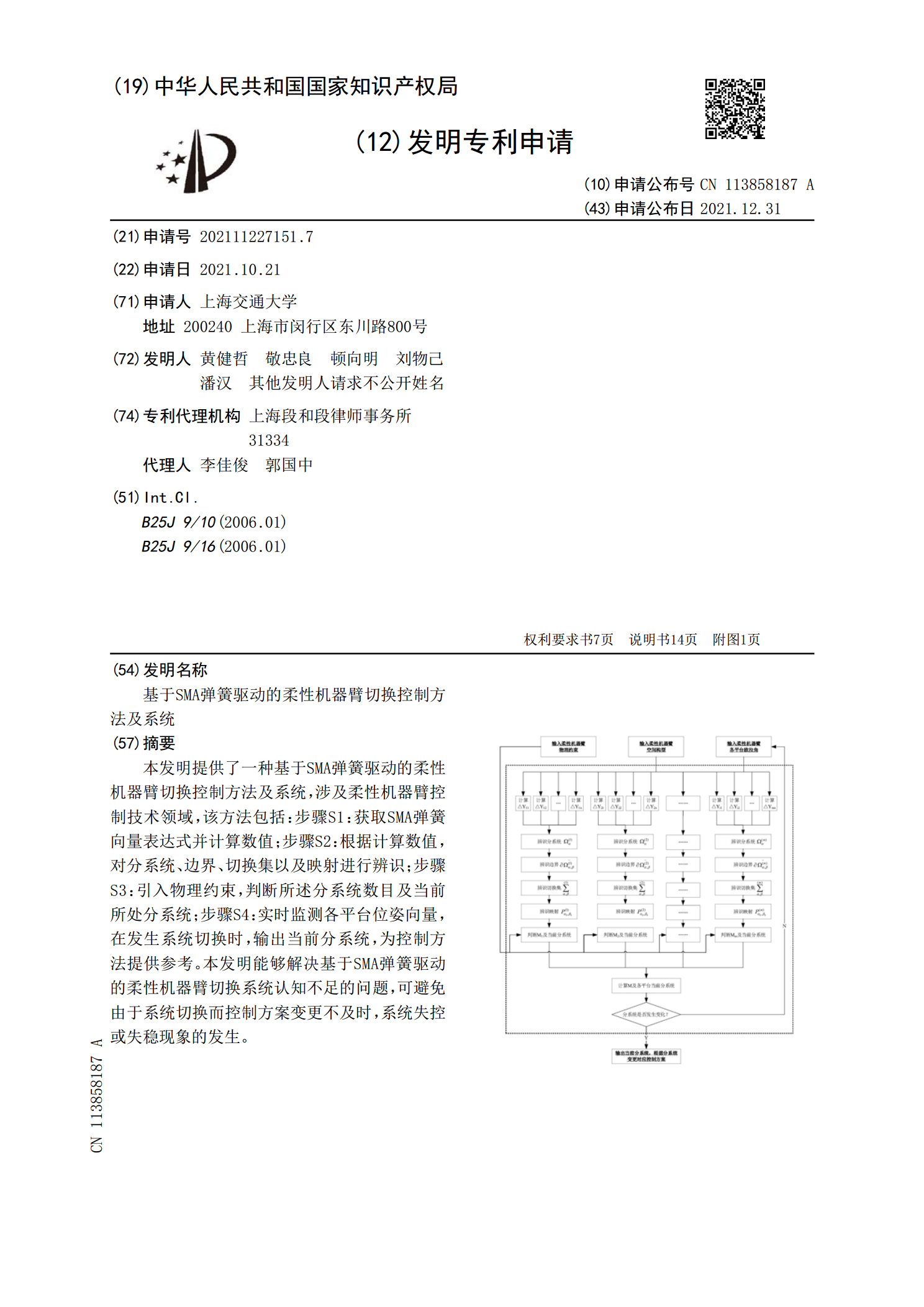
本发明提供了一种基于SMA弹簧驱动的柔性机器臂切换控制方法及系统,涉及柔性机器臂控制技术领域,该方法包括:步骤S1:获取SMA弹簧向量表达式并计算数值;步骤S2:根据计算数值,对分系统、边界、切换集以及映射进行辨识;步骤S3:引入物理约束,判断所述分系统数目及当前所处分系统;步骤S4:实时监测各平台位姿向量,在发生系统切换时,输出当前分系统,为控制方法提供参考。本发明能够解决基于SMA弹簧驱动的柔性机器臂切换系统认知不足的问题,可避免由于系统切换而控制方案变更不及时,系统失控或失稳现象的发生。

一种基于扭转弹簧的自适应柔性手爪及机器人.pdf
本发明涉及连续型机器人技术领域,公开了一种基于扭转弹簧的自适应柔性手爪及机器人。本发明的基于扭转弹簧的自适应柔性手爪包括驱动装置、传动装置以及柔性手指,传动装置包括第一锥齿轮、第二锥齿轮、扭簧以及绞盘轴,第一锥齿轮与驱动装置连接,第二锥齿轮与第一锥齿轮啮合连接,第二锥齿轮套设于锥齿轮轴上,扭簧一端与锥齿轮轴固定连接,另一端与绞盘轴固定连接,柔性手指上设有驱动绳索,驱动绳索缠绕于绞盘轴上,且其自由端与柔性手指的端部固定连接。本发明的机器人包括机器人主体及固设于机器人主体上的上述柔性手爪。本发明的基于扭转弹簧