
电控多桥转向车辆转角误差控制装置及系统控制方法.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电控多桥转向车辆转角误差控制装置及系统控制方法.docx
电控多桥转向车辆转角误差控制装置及系统控制方法摘要随着科技的不断进步,交通安全问题日益引起社会关注。本文介绍了一种电控多桥转向车辆转角误差控制装置及系统控制方法,旨在提高车辆转向的准确性和安全性。该装置通过对车辆的转向角度和方向进行监测和控制,减小车辆在行驶过程中的转角误差,提高转向的精度和稳定性。本文详细介绍了该装置的工作原理和系统结构,并进行了仿真实验和路试实验,证明了该装置的有效性和实用性。本文对该装置的优劣势进行了分析和总结,并提出了进一步改进的思路。关键词:电控多桥转向车辆、转角误差控制、系统控

助力转向系统控制方法、控制装置及车辆.pdf
本发明公开了一种助力转向系统控制方法、控制装置及车辆,该方法包括:获取车辆的转向关联参数;根据方向盘转向角确定转向参数;根据转向参数和转向关联参数确定转向泵的助力转向需求扭矩、怠速转向预留扭矩及发动机的怠速转速需求值,助力转向需求扭矩基于静态需求扭矩和动态需求扭矩计算得到;根据助力转向需求扭矩、怠速转向预留扭矩及怠速转速需求值控制助力转向系统运行。本发明通过计算转向泵的静态需求扭矩、动态需求扭矩、怠速转向预留扭矩及怠速转速需求值,通过扭矩补偿精确调整不同工况下的输出扭矩,提升车辆驾驶舒适度和稳定性。
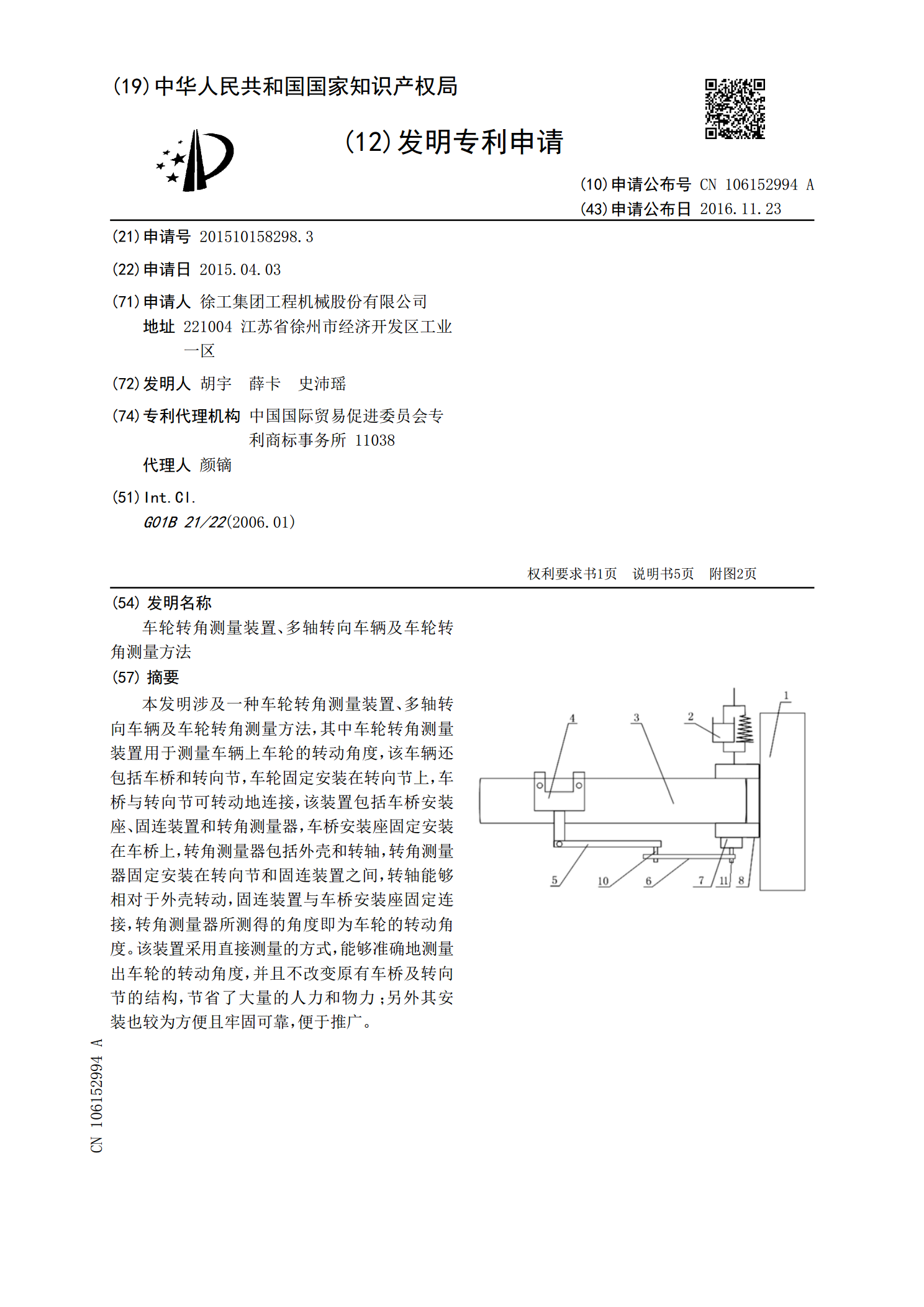
车轮转角测量装置、多轴转向车辆及车轮转角测量方法.pdf
本发明涉及一种车轮转角测量装置、多轴转向车辆及车轮转角测量方法,其中车轮转角测量装置用于测量车辆上车轮的转动角度,该车辆还包括车桥和转向节,车轮固定安装在转向节上,车桥与转向节可转动地连接,该装置包括车桥安装座、固连装置和转角测量器,车桥安装座固定安装在车桥上,转角测量器包括外壳和转轴,转角测量器固定安装在转向节和固连装置之间,转轴能够相对于外壳转动,固连装置与车桥安装座固定连接,转角测量器所测得的角度即为车轮的转动角度。该装置采用直接测量的方式,能够准确地测量出车轮的转动角度,并且不改变原有车桥及转向节
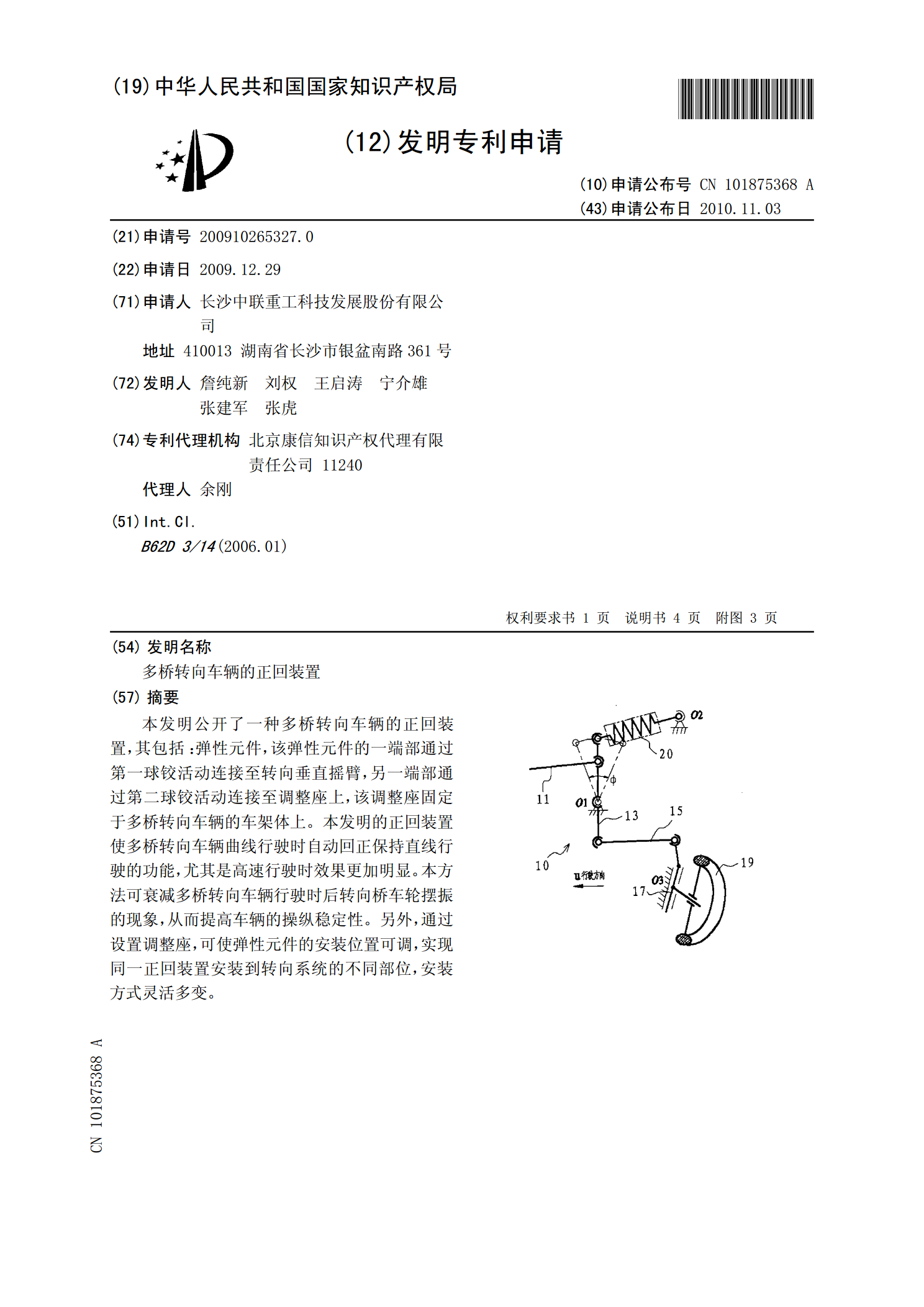
多桥转向车辆的正回装置.pdf
本发明公开了一种多桥转向车辆的正回装置,其包括:弹性元件,该弹性元件的一端部通过第一球铰活动连接至转向垂直摇臂,另一端部通过第二球铰活动连接至调整座上,该调整座固定于多桥转向车辆的车架体上。本发明的正回装置使多桥转向车辆曲线行驶时自动回正保持直线行驶的功能,尤其是高速行驶时效果更加明显。本方法可衰减多桥转向车辆行驶时后转向桥车轮摆振的现象,从而提高车辆的操纵稳定性。另外,通过设置调整座,可使弹性元件的安装位置可调,实现同一正回装置安装到转向系统的不同部位,安装方式灵活多变。
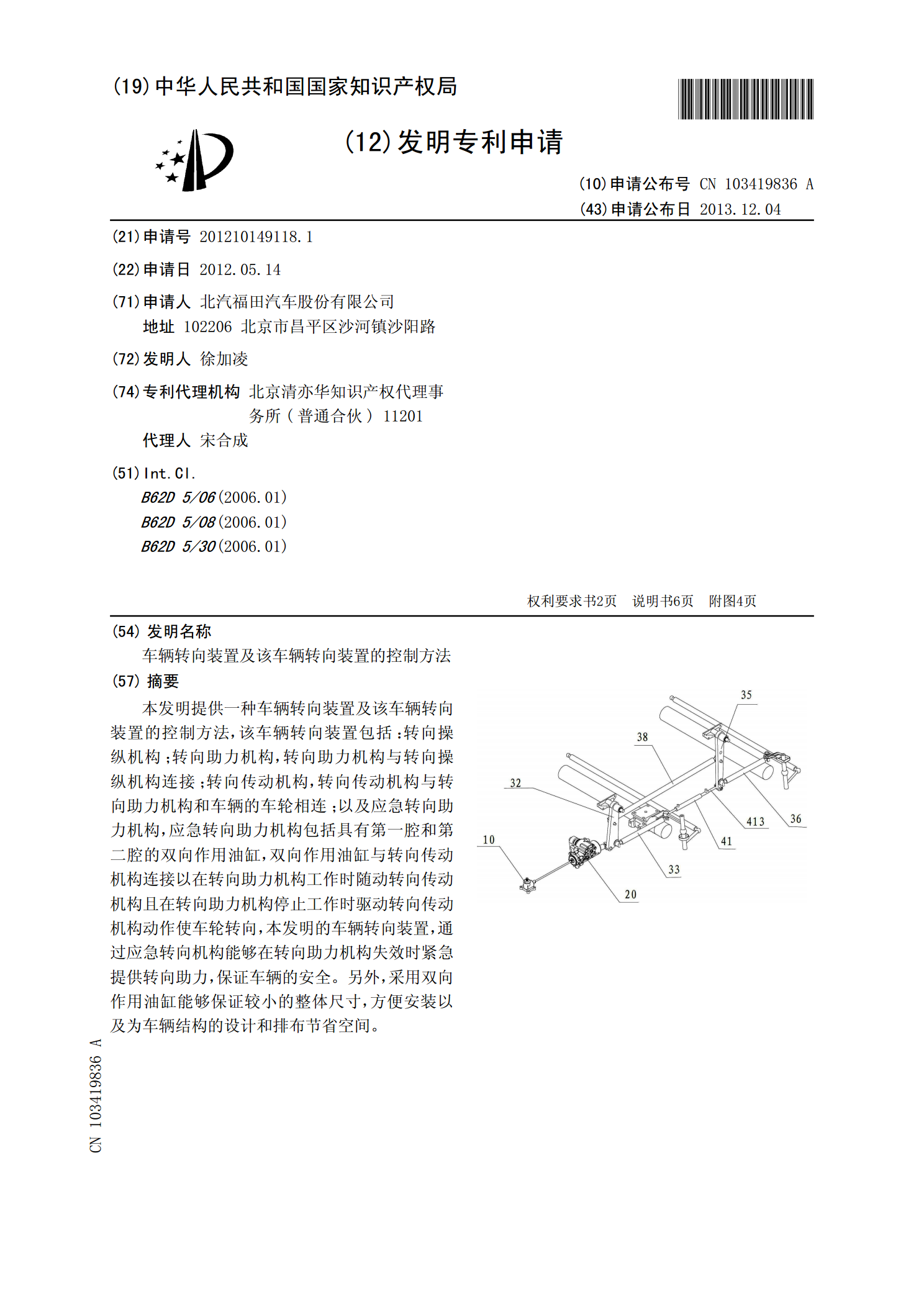
车辆转向装置及该车辆转向装置的控制方法.pdf
本发明提供一种车辆转向装置及该车辆转向装置的控制方法,该车辆转向装置包括:转向操纵机构;转向助力机构,转向助力机构与转向操纵机构连接;转向传动机构,转向传动机构与转向助力机构和车辆的车轮相连;以及应急转向助力机构,应急转向助力机构包括具有第一腔和第二腔的双向作用油缸,双向作用油缸与转向传动机构连接以在转向助力机构工作时随动转向传动机构且在转向助力机构停止工作时驱动转向传动机构动作使车轮转向,本发明的车辆转向装置,通过应急转向机构能够在转向助力机构失效时紧急提供转向助力,保证车辆的安全。另外,采用双向作用油