
一种新型抓取机械手.pdf

建英****66


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型抓取机械手.pdf
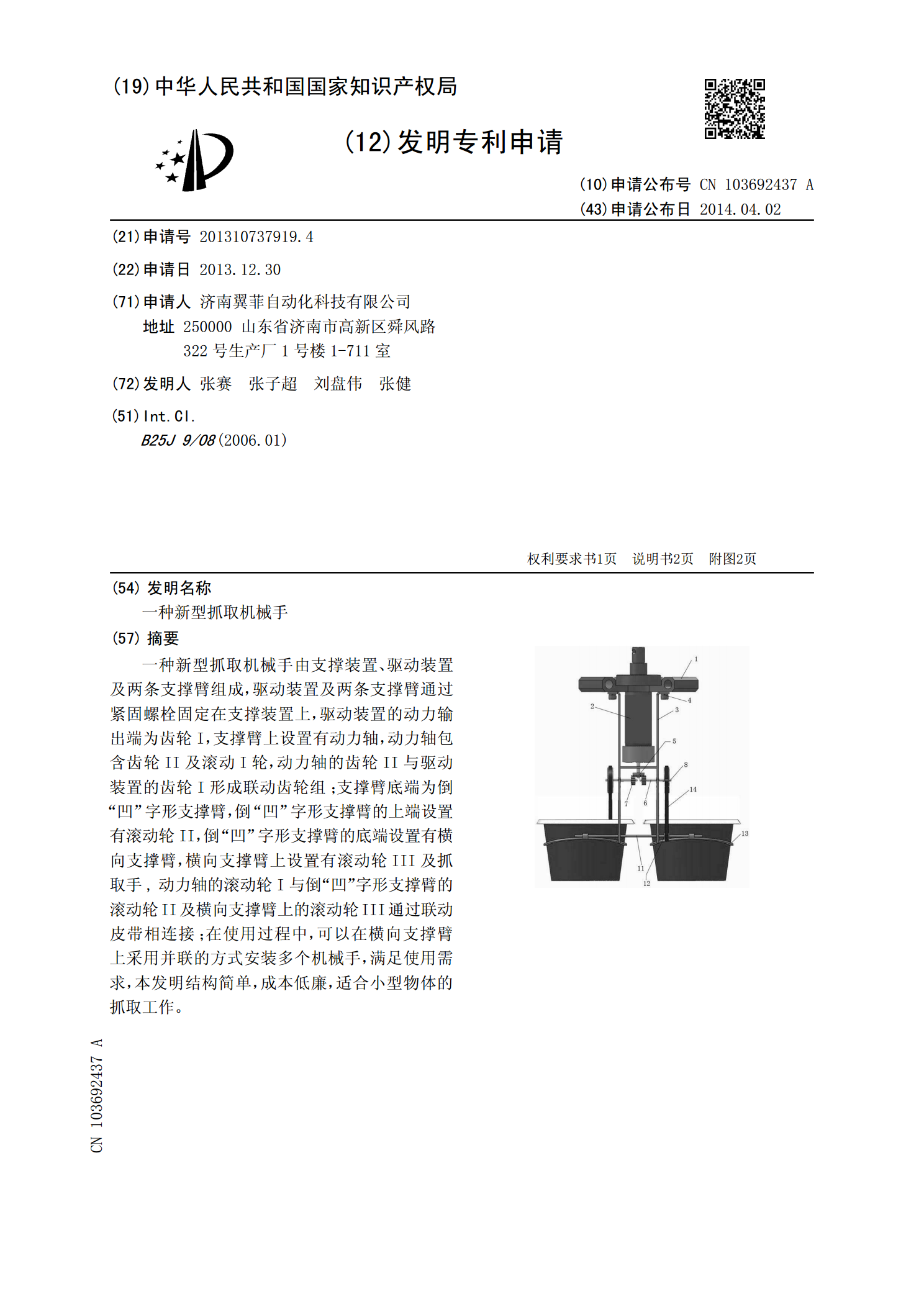
一种新型抓取机械手由支撑装置、驱动装置及两条支撑臂组成,驱动装置及两条支撑臂通过紧固螺栓固定在支撑装置上,驱动装置的动力输出端为齿轮I,支撑臂上设置有动力轴,动力轴包含齿轮II及滚动I轮,动力轴的齿轮II与驱动装置的齿轮I形成联动齿轮组;支撑臂底端为倒“凹”字形支撑臂,倒“凹”字形支撑臂的上端设置有滚动轮II,倒“凹”字形支撑臂的底端设置有横向支撑臂,横向支撑臂上设置有滚动轮III及抓取手,动力轴的滚动轮I与倒“凹”字形支撑臂的滚动轮II及横向支撑臂上的滚动轮III通过联动皮带相连接;在使用过程中,可以在
一种新型抓取握紧式机械手.pdf
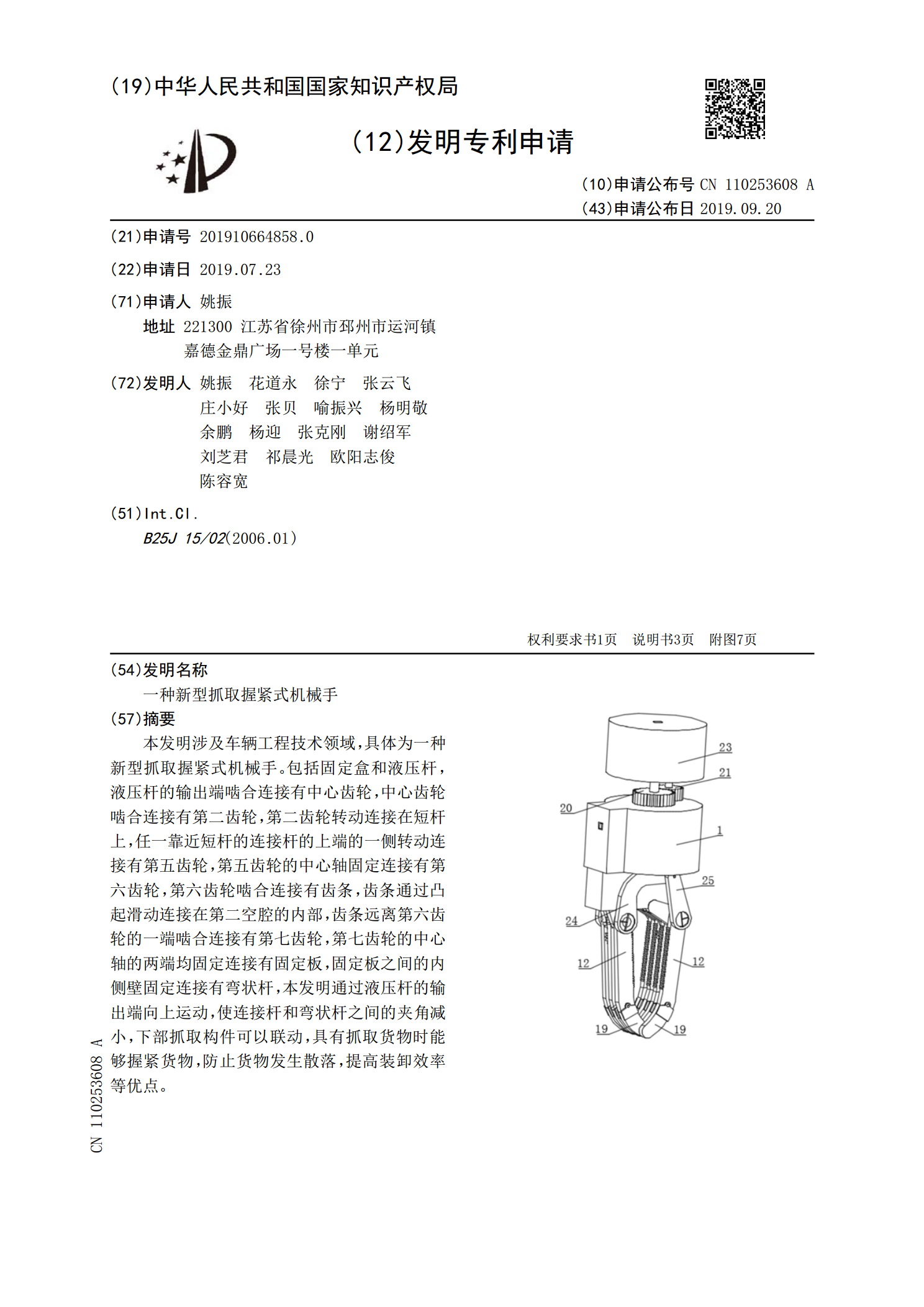
本发明涉及车辆工程技术领域,具体为一种新型抓取握紧式机械手。包括固定盒和液压杆,液压杆的输出端啮合连接有中心齿轮,中心齿轮啮合连接有第二齿轮,第二齿轮转动连接在短杆上,任一靠近短杆的连接杆的上端的一侧转动连接有第五齿轮,第五齿轮的中心轴固定连接有第六齿轮,第六齿轮啮合连接有齿条,齿条通过凸起滑动连接在第二空腔的内部,齿条远离第六齿轮的一端啮合连接有第七齿轮,第七齿轮的中心轴的两端均固定连接有固定板,固定板之间的内侧壁固定连接有弯状杆,本发明通过液压杆的输出端向上运动,使连接杆和弯状杆之间的夹角减小,下部抓
新型多功能抓取料机械手.pdf
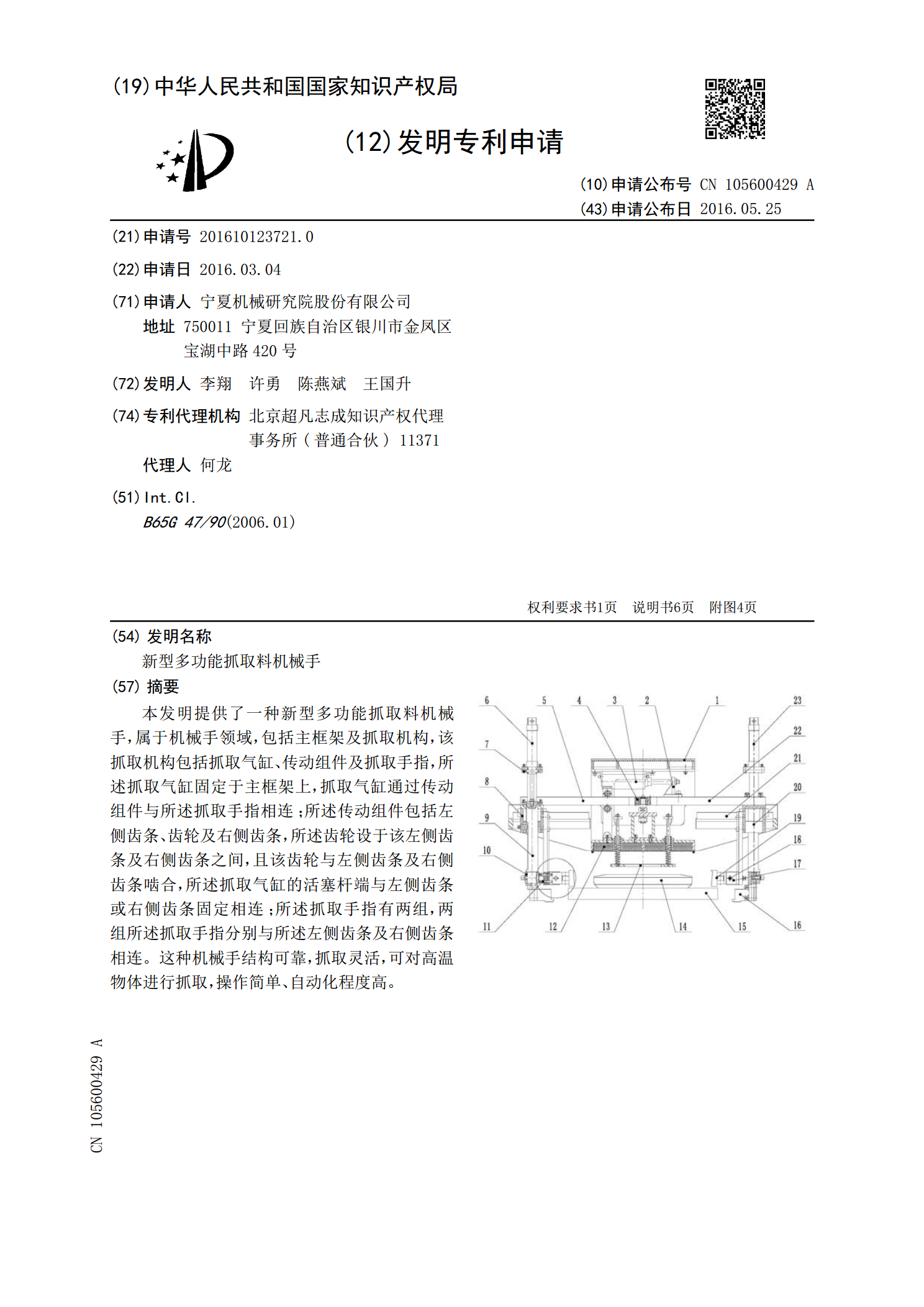
本发明提供了一种新型多功能抓取料机械手,属于机械手领域,包括主框架及抓取机构,该抓取机构包括抓取气缸、传动组件及抓取手指,所述抓取气缸固定于主框架上,抓取气缸通过传动组件与所述抓取手指相连;所述传动组件包括左侧齿条、齿轮及右侧齿条,所述齿轮设于该左侧齿条及右侧齿条之间,且该齿轮与左侧齿条及右侧齿条啮合,所述抓取气缸的活塞杆端与左侧齿条或右侧齿条固定相连;所述抓取手指有两组,两组所述抓取手指分别与所述左侧齿条及右侧齿条相连。这种机械手结构可靠,抓取灵活,可对高温物体进行抓取,操作简单、自动化程度高。

一种抓取机械手.pdf
一种抓取机械手,包括一个驱动机构、爪钳及力矩传递机构;驱动机构为直线气缸;力矩传递机构包括固定在缸体上的连接板,连接板上设有两个啮合的齿轮,两个齿轮上分别铰接有第一连杆以及固定有第三连接杆,第一连杆另一端分别铰接有第二连杆,第二连杆的另一端分别铰接在活塞杆上,第三连杆的另一端分别与两根爪钳的尾部相铰接,连接板上远离缸体的一端铰接有两根第四连杆,两根第四连杆远离连接板的一端分别铰接在两根爪钳的中部。本发明成本低廉并能有效解决现有技术中机械手存在的作业速度不稳定并伴有速度损失等问题。

一种新型欠驱动机械手爪的抓取分析和优化设计.docx
一种新型欠驱动机械手爪的抓取分析和优化设计标题:一种新型欠驱动机械手爪的抓取分析和优化设计摘要:机械手是现代工业自动化中的重要设备,其夹爪作为机械手的末端执行器,直接参与物体抓取和放置等操作。欠驱动机械手爪以其灵活性、节能性和成本效益等优势受到了广泛的关注。本文针对一种新型欠驱动机械手爪,进行了抓取分析和优化设计,通过分析机械手爪的结构特点和工作原理,提出了一种改进的适应现实工作场景的控制策略。通过数值模拟和实验验证,验证了该优化设计的可行性和有效性。关键词:欠驱动机械手爪,抓取分析,优化设计,控制策略,