
一种六足履带式建筑机器人移动平台.pdf

哲妍****彩妍

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种六足履带式建筑机器人移动平台.pdf
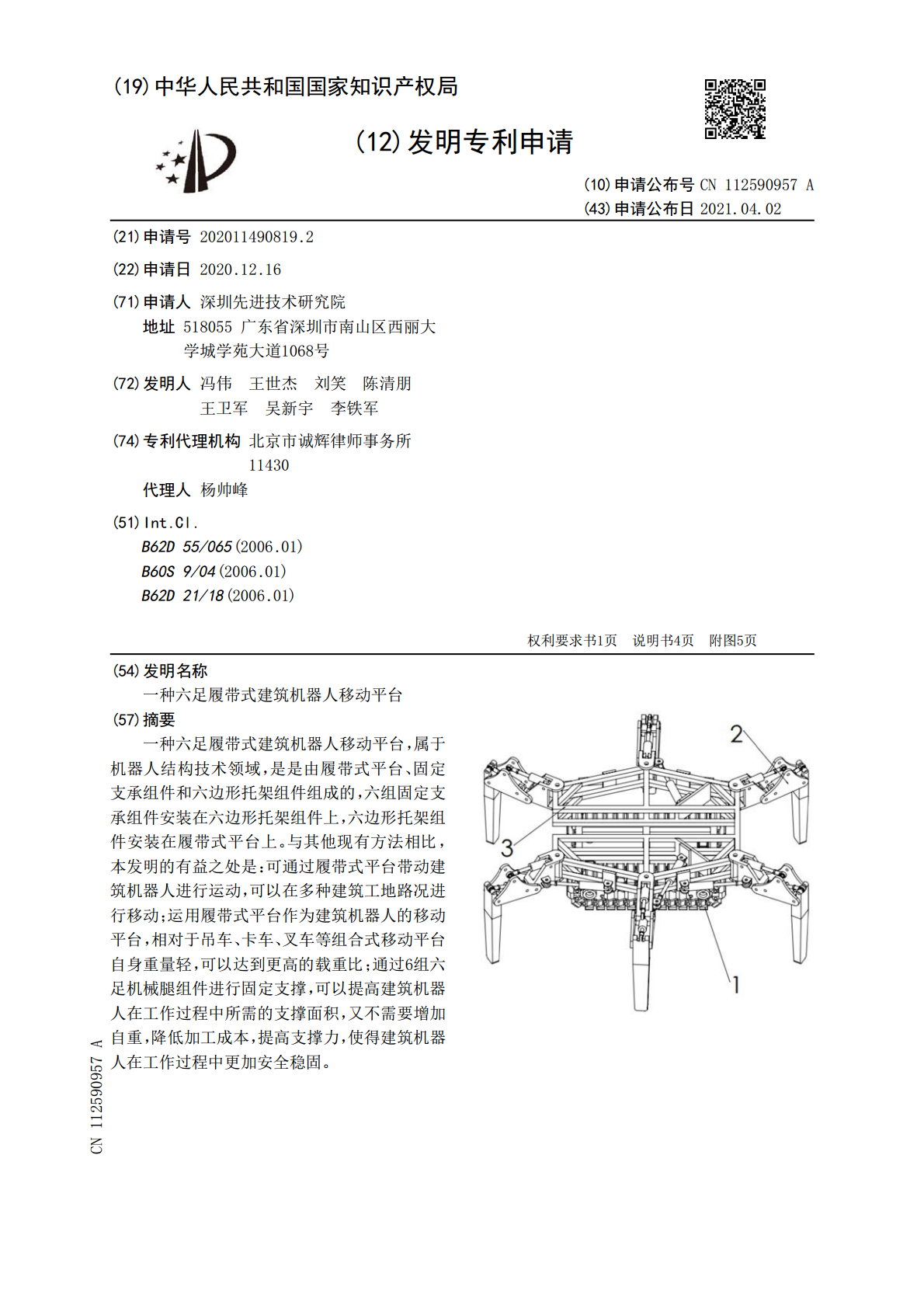
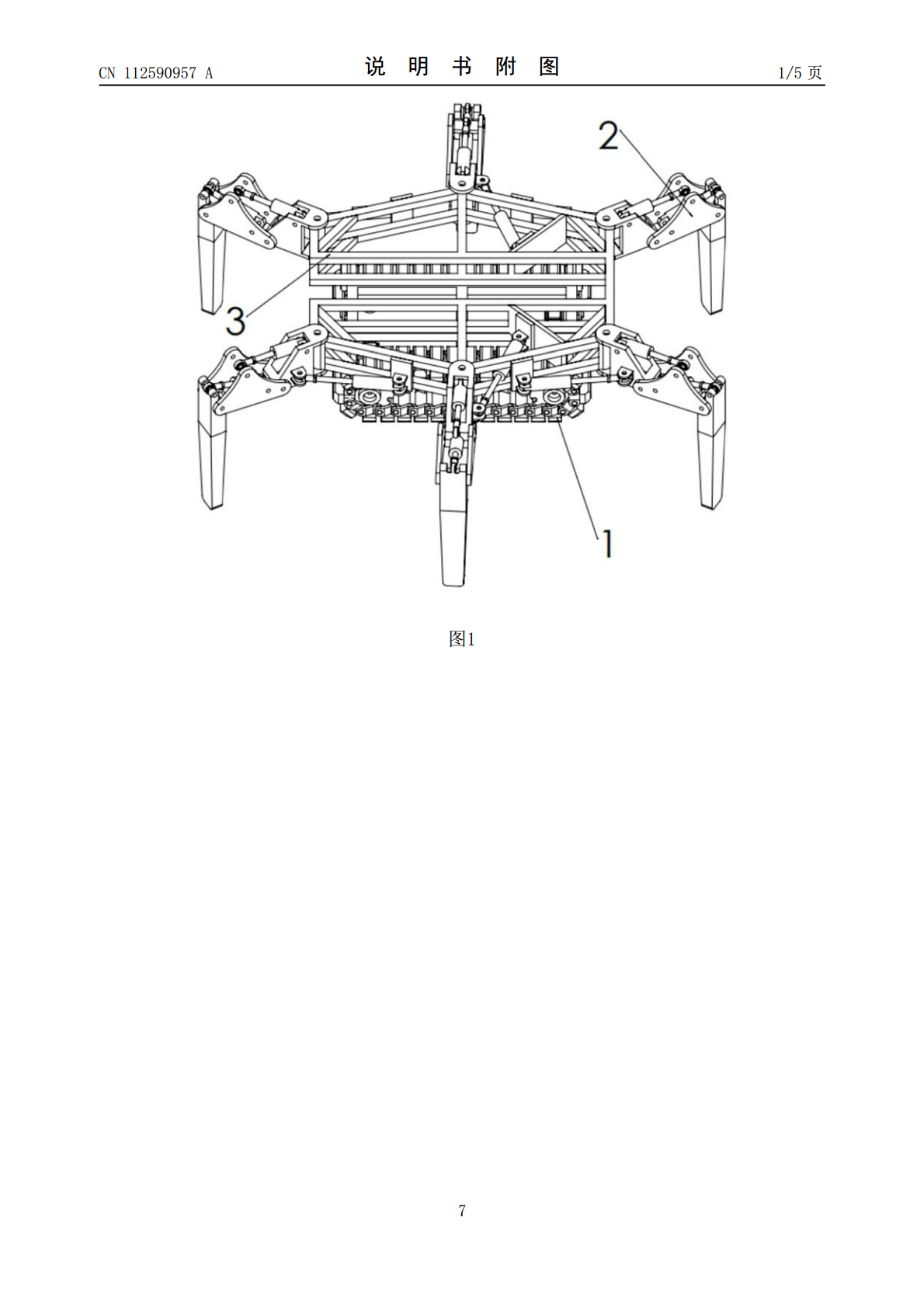
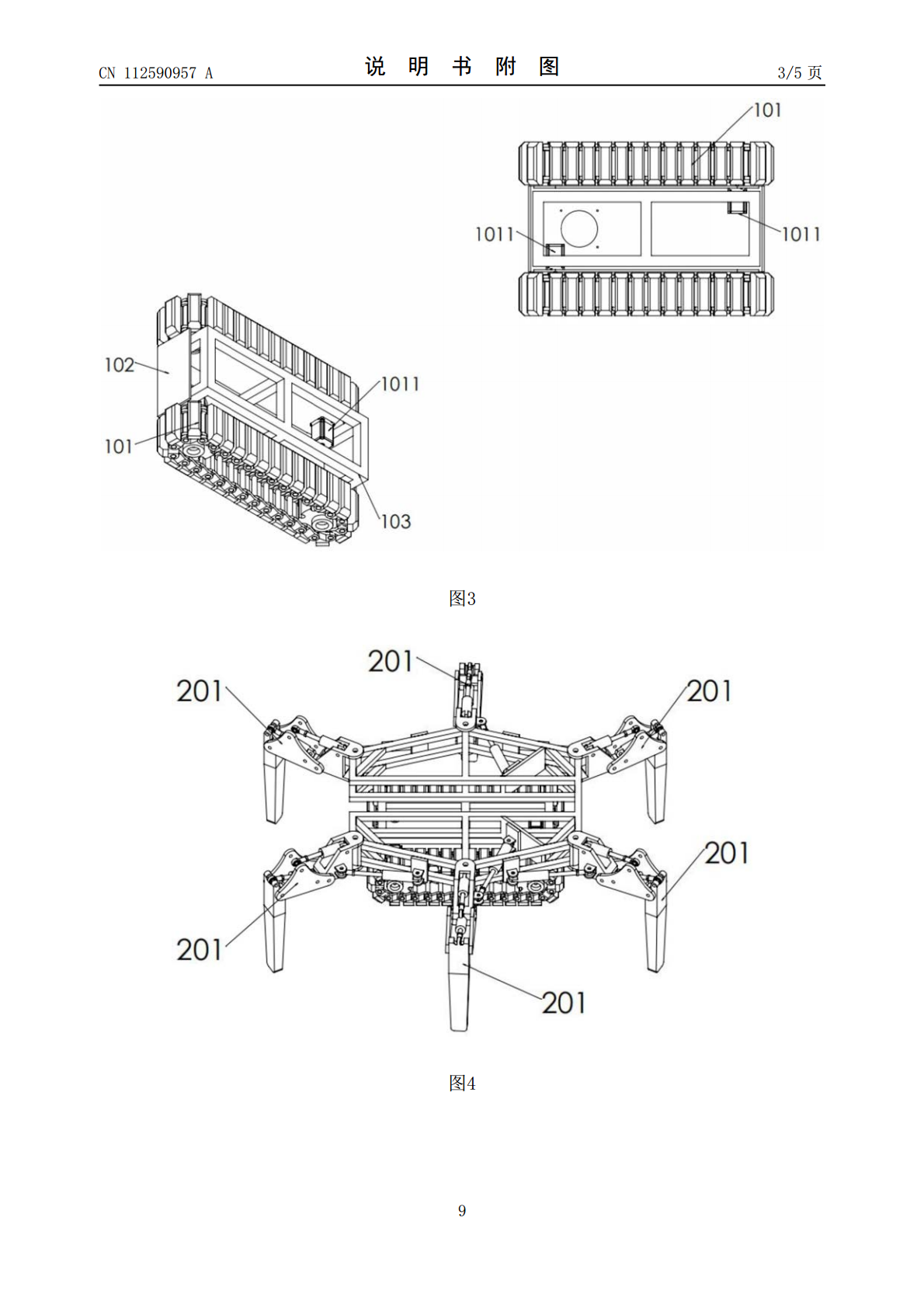
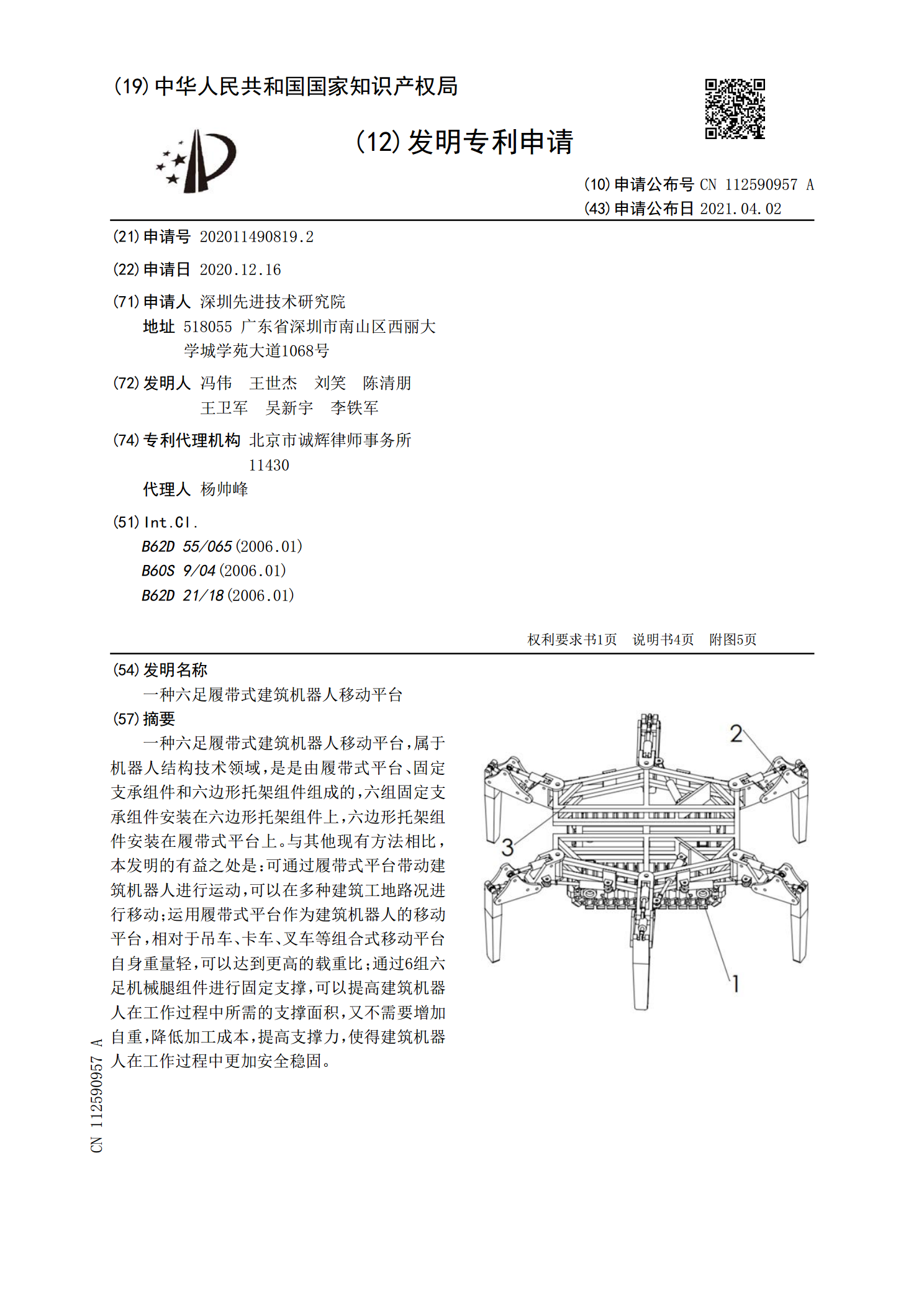
一种六足履带式建筑机器人移动平台,属于机器人结构技术领域,是是由履带式平台、固定支承组件和六边形托架组件组成的,六组固定支承组件安装在六边形托架组件上,六边形托架组件安装在履带式平台上。与其他现有方法相比,本发明的有益之处是:可通过履带式平台带动建筑机器人进行运动,可以在多种建筑工地路况进行移动;运用履带式平台作为建筑机器人的移动平台,相对于吊车、卡车、叉车等组合式移动平台自身重量轻,可以达到更高的载重比;通过6组六足机械腿组件进行固定支撑,可以提高建筑机器人在工作过程中所需的支撑面积,又不需要增加自重,

一种轮腿复合式六足机器人移动平台.pdf
本发明公开了一种轮腿复合式六足机器人移动平台。此轮腿复合式六足机器人移动平台,在躯干及在躯干两侧设置的多足移动机构,以及躯干的底面设置的轮式移动机构,使得在复杂的环境下的越障采用多足移动机构运动越障,在平坦的环境下采用轮式移动机构运动,可根据路况选择运动方式,具有极强的运动能力和环境适应性,提高移动效率。转向的前轮布置在机器人前侧,前足的各舵机Ⅰ用于控制前轮转向,提供转向动力,使得前轮借用腿部舵机Ⅰ转向,减少了驱动力,同时使得载重比大,越障能力强。本发明适用于机器人领域。

一种欠驱动履带式机器人移动平台.pdf
本发明涉及一种欠驱动履带式机器人移动平台,其主要技术特点是:在机器人本体机构的前端安装差动齿轮机构并与驱动电机相连接,该差动齿轮机构作为机器人平台动力传递的主要机构;在机器人本体两侧对称设有欠驱动变形履带机构并与差动齿轮机构相连接,该欠驱动变形履带机构作为机器人与复杂路况的主要交互机构;在欠驱动变形履带机构的外侧安装有辅助越障机构,该辅助越障机构与欠驱动变形履带机构及差动齿轮机构相连接,该辅助越障机构作为机器人与复杂路况的次要交互机构。本发明采用欠驱动的变形履带式行走机构和辅助越障机构的组合模式,能够满足

履带式移动机器人平台.pdf
本发明涉及履带式移动机器人平台,其包括机器人结构和控制系统,其特征在于机器人结构采用四履带式结构,四履带式结构包括四条履带、驱动机构、机体,两条履带分别固定的机体的两侧,另两条履带的动力端分别与前两条履带的一端同轴且是驱动机构的输出轴同轴,其从动端悬空,驱动机构固定机体内部且与四条履带的传动轴连接,驱动机构包括翻转臂转动机构、多台直流伺服电机,多台直流伺服电机驱动行星减速器A1、A2、和齿轮Z1、Z2、Z3,并通过2对伞齿带动翻转臂转动机构。本发明结构简单,能适应各种路况,行驶平稳。
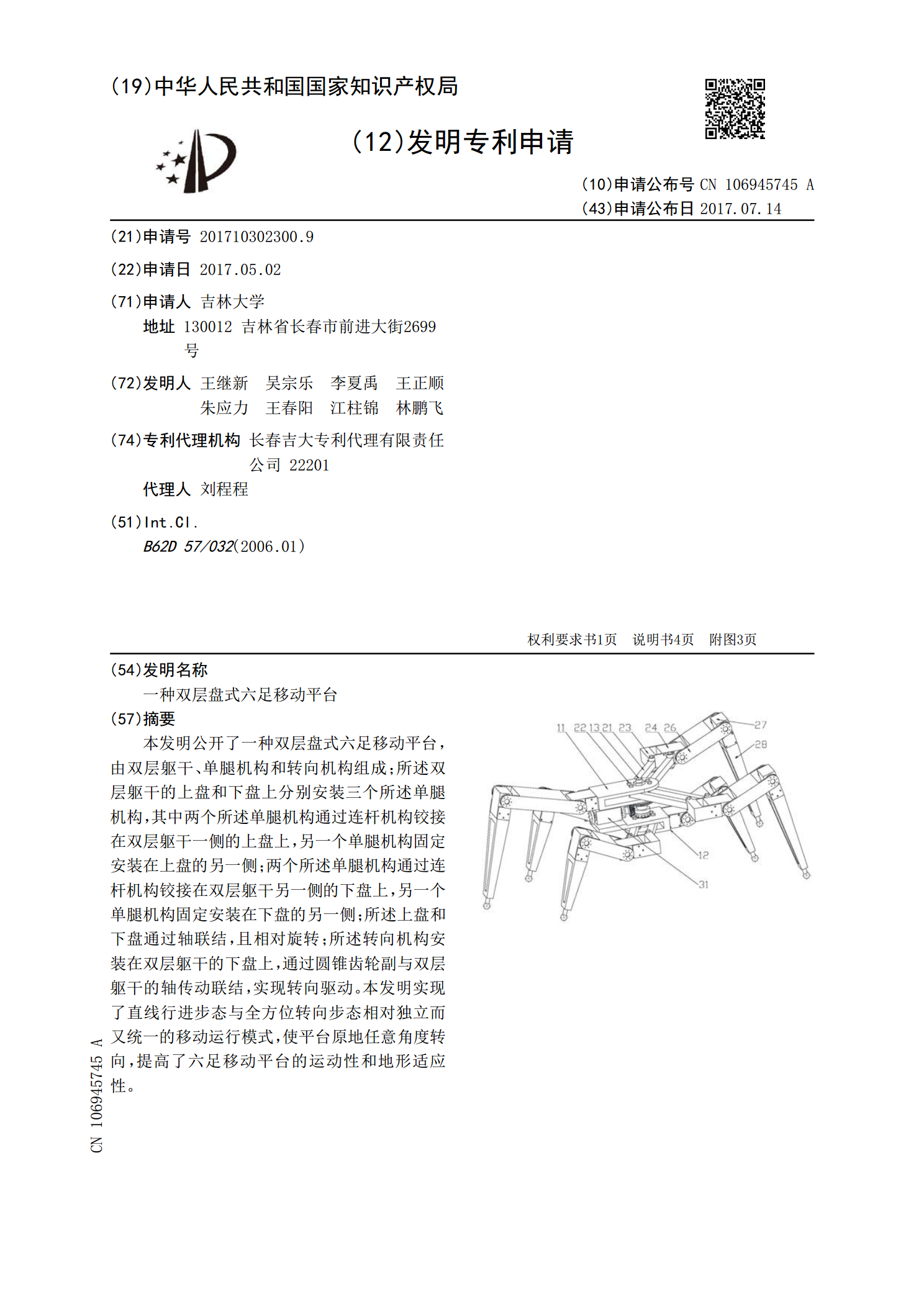
一种双层盘式六足移动平台.pdf
本发明公开了一种双层盘式六足移动平台,由双层躯干、单腿机构和转向机构组成;所述双层躯干的上盘和下盘上分别安装三个所述单腿机构,其中两个所述单腿机构通过连杆机构铰接在双层躯干一侧的上盘上,另一个单腿机构固定安装在上盘的另一侧;两个所述单腿机构通过连杆机构铰接在双层躯干另一侧的下盘上,另一个单腿机构固定安装在下盘的另一侧;所述上盘和下盘通过轴联结,且相对旋转;所述转向机构安装在双层躯干的下盘上,通过圆锥齿轮副与双层躯干的轴传动联结,实现转向驱动。本发明实现了直线行进步态与全方位转向步态相对独立而又统一的移动运