
一种X型升降驱动机构及驱动方法.pdf

慧颖****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种X型升降驱动机构及驱动方法.pdf
本发明涉及一种X型升降驱动机构及驱动方法,其特征在于X型升降叉臂下方设置有驱动辅助件,驱动辅助件由左右驱动臂、转动连接片与连接杆构成,驱动臂的一端呈可旋转地分别安装在底框架的近中部位置,驱动臂的另一端端部设有一滑动轮,通过所述滑动轮分别与X型升降组件叉臂的底面滑动接触,两驱动臂间通过连接杆相连,转动连接片的底端固定于连接杆上,转动连接片的顶端可转动地与驱动杆相接。本发明简单而又经济的方法改变了驱动角度的力学关系,使得上升时的驱动力大为减小,特别是极大地减轻了在超低位时的上升启动力。
一种升降驱动机构.pdf
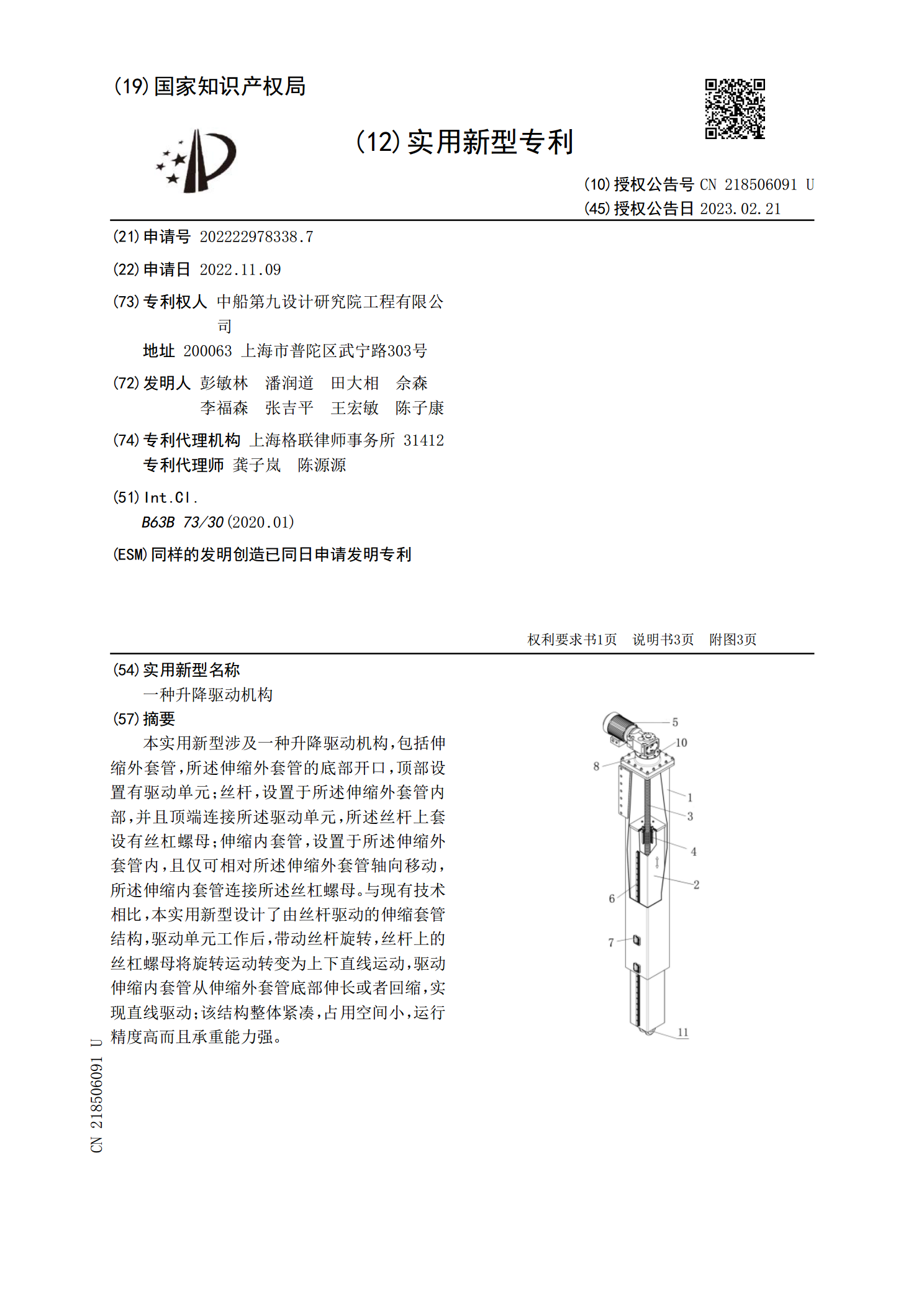
本实用新型涉及一种升降驱动机构,包括伸缩外套管,所述伸缩外套管的底部开口,顶部设置有驱动单元;丝杆,设置于所述伸缩外套管内部,并且顶端连接所述驱动单元,所述丝杆上套设有丝杠螺母;伸缩内套管,设置于所述伸缩外套管内,且仅可相对所述伸缩外套管轴向移动,所述伸缩内套管连接所述丝杠螺母。与现有技术相比,本实用新型设计了由丝杆驱动的伸缩套管结构,驱动单元工作后,带动丝杆旋转,丝杆上的丝杠螺母将旋转运动转变为上下直线运动,驱动伸缩内套管从伸缩外套管底部伸长或者回缩,实现直线驱动;该结构整体紧凑,占用空间小,运行精度高

一种新型驱动滑行架升降的驱动机构.pdf
本发明公开了一种新型驱动滑行架升降的驱动机构,飞行塔包括塔架,塔架上设有可在塔架上、下滑行及旋转的滑行架,其特征在于塔架上的一侧设有拉动滑行架在塔架上、下滑行的液压缸,在塔架上的另一侧还设有与滑行架连接的配重。本发明配重的重量抵消了滑行架本身重量,从而降低液压缸的驱动功率,结构简单,成本低。
一种含有动力液压驱动机构的框架升降台及其驱动方法.pdf
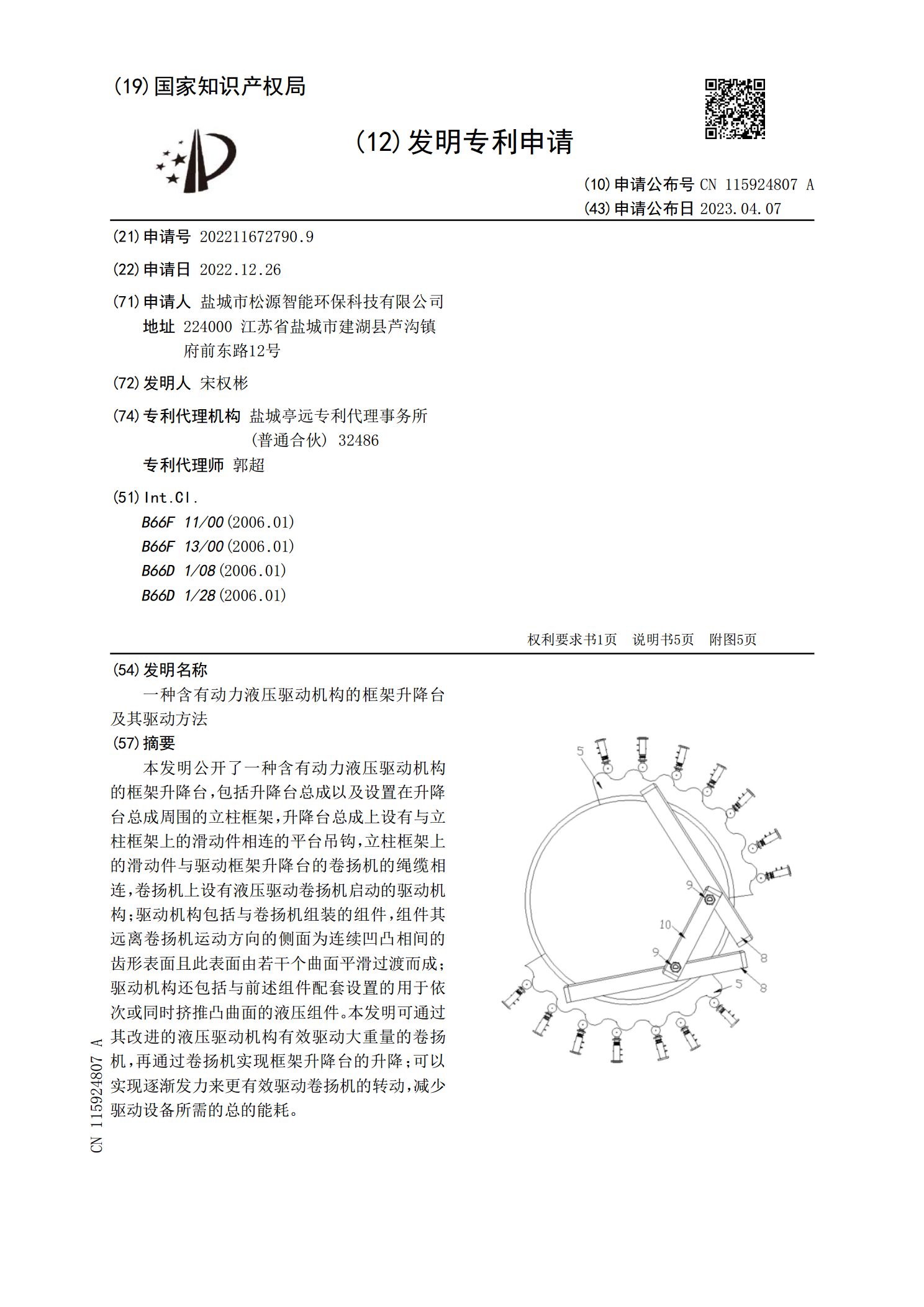
本发明公开了一种含有动力液压驱动机构的框架升降台,包括升降台总成以及设置在升降台总成周围的立柱框架,升降台总成上设有与立柱框架上的滑动件相连的平台吊钩,立柱框架上的滑动件与驱动框架升降台的卷扬机的绳缆相连,卷扬机上设有液压驱动卷扬机启动的驱动机构;驱动机构包括与卷扬机组装的组件,组件其远离卷扬机运动方向的侧面为连续凹凸相间的齿形表面且此表面由若干个曲面平滑过渡而成;驱动机构还包括与前述组件配套设置的用于依次或同时挤推凸曲面的液压组件。本发明可通过其改进的液压驱动机构有效驱动大重量的卷扬机,再通过卷扬机实现
凸轮驱动升降检测机构.pdf
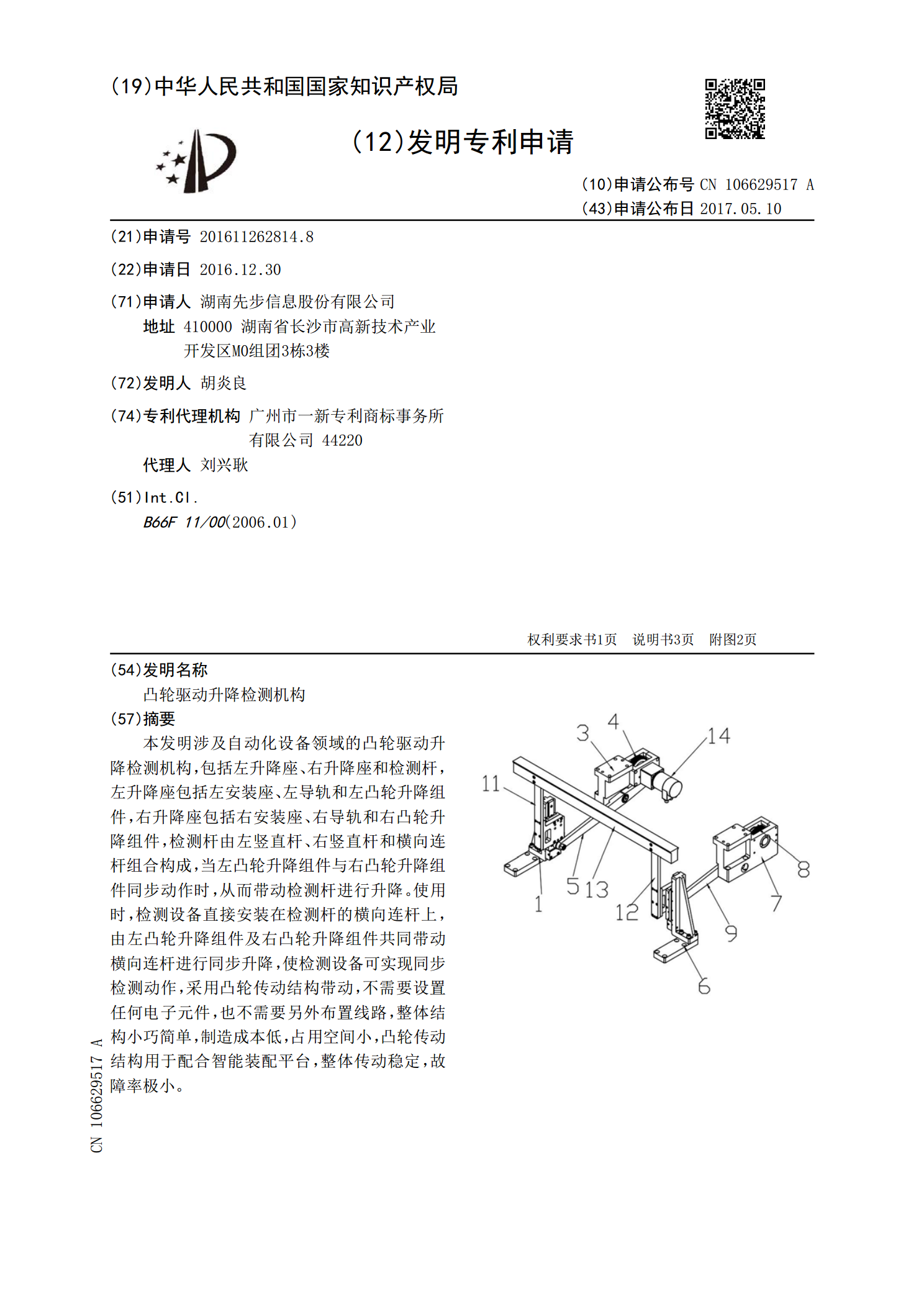
本发明涉及自动化设备领域的凸轮驱动升降检测机构,包括左升降座、右升降座和检测杆,左升降座包括左安装座、左导轨和左凸轮升降组件,右升降座包括右安装座、右导轨和右凸轮升降组件,检测杆由左竖直杆、右竖直杆和横向连杆组合构成,当左凸轮升降组件与右凸轮升降组件同步动作时,从而带动检测杆进行升降。使用时,检测设备直接安装在检测杆的横向连杆上,由左凸轮升降组件及右凸轮升降组件共同带动横向连杆进行同步升降,使检测设备可实现同步检测动作,采用凸轮传动结构带动,不需要设置任何电子元件,也不需要另外布置线路,整体结构小巧简单,