
一种单电机驱动双摆臂转动的装置.pdf

论文****轩吖

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单电机驱动双摆臂转动的装置.pdf
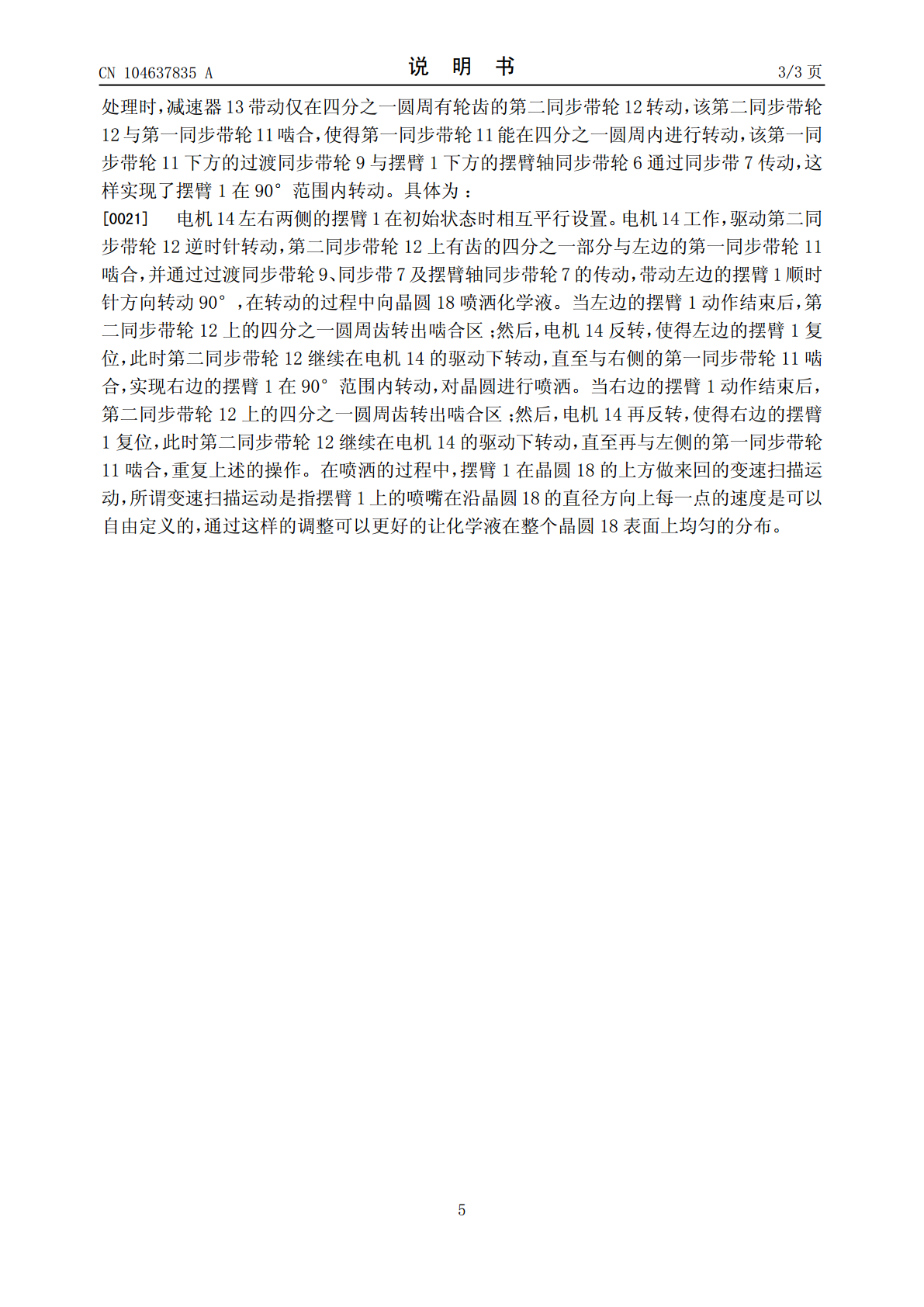
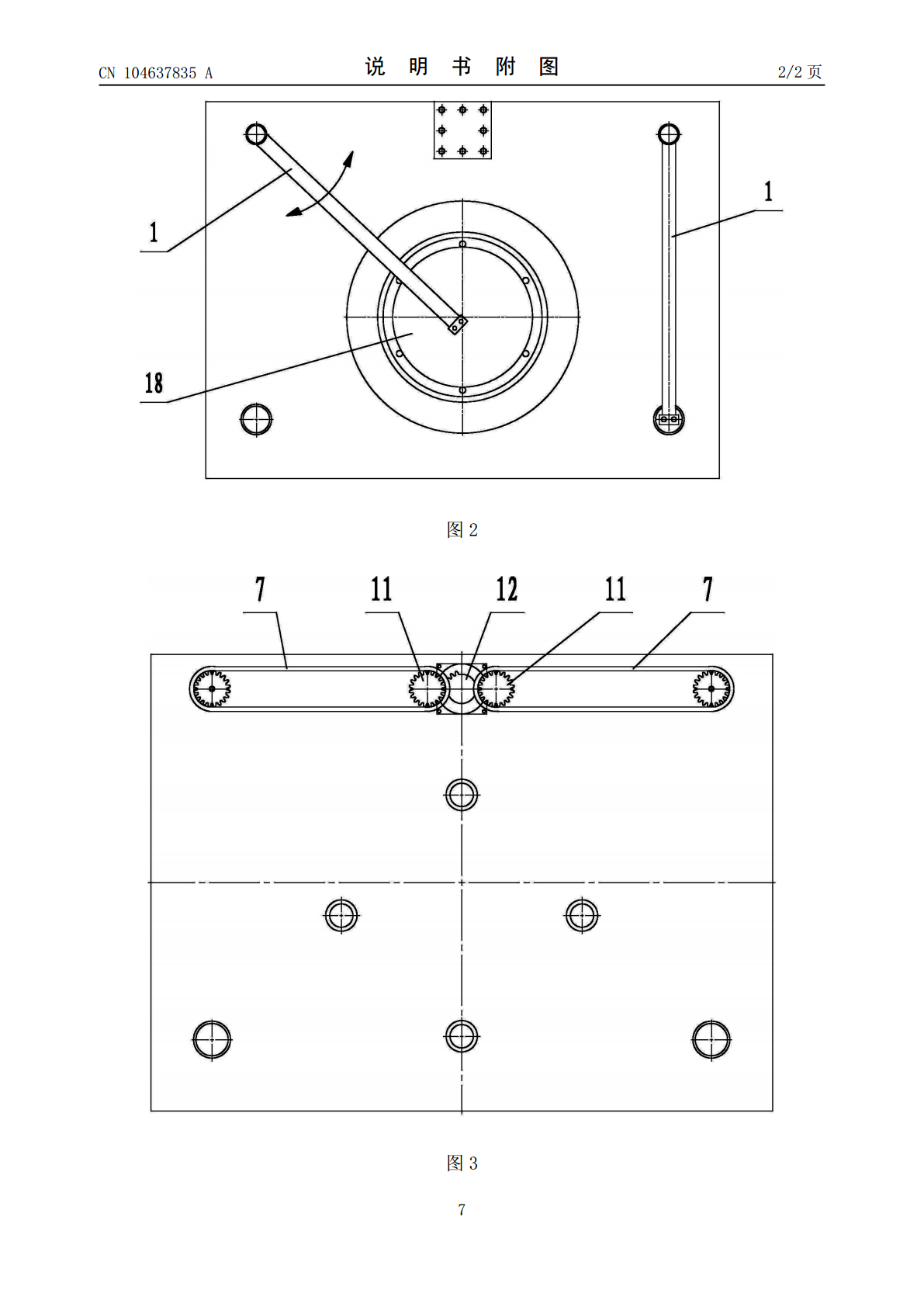
本发明属于半导体行业晶片湿法处理领域,具体地说是一种单电机驱动双摆臂转动的装置,包括电机、单元固定板、减速器及摆臂单元,电机通过单元固定板安装在晶圆处理单元底座上,电机的输出端连接有减速器,在减速器的输出端连接有第二同步带轮,第二同步带轮的圆周上设有齿;电机的两侧对称设置有结构相同的摆臂单元,摆臂单元包括带轮轴、第一同步带轮、同步传动机构、摆臂轴及摆臂,带轮轴及摆臂轴分别转动安装在单元固定板上,在带轮轴上连接有与第二同步带轮相啮合的第一同步带轮,第一同步带轮通过同步传动机构与摆臂轴的一端相连,摆臂轴的另一

一种单电机驱动双摆臂转动的装置.pdf
本发明公开了一种单电机驱动双摆臂转动的装置,包括电机,单元固定板,减速器及摆臂单元,电机及减速器各一个。减速器包括外壳体、安装在外壳体内部的少齿差行星传动机构和蜗轮蜗杆传动机构,所述蜗轮蜗杆传动机构的蜗轮固定地安装在少齿差行星传动机构的输入轴上。实际应用中,旋转运动从蜗轮蜗杆传动机构输入,从少齿差行星传动机构的输出轴输出,在整个传动过程中,旋转运动经过了两级减速,显著地提高了传动比以及所能承受的负载,此外,蜗轮蜗杆传动机构与少齿差传动机构设置在同一个外壳体的内部并者两者直接连接,使得减速器的结构紧凑,体积
一种伺服驱动双摆臂装置.pdf
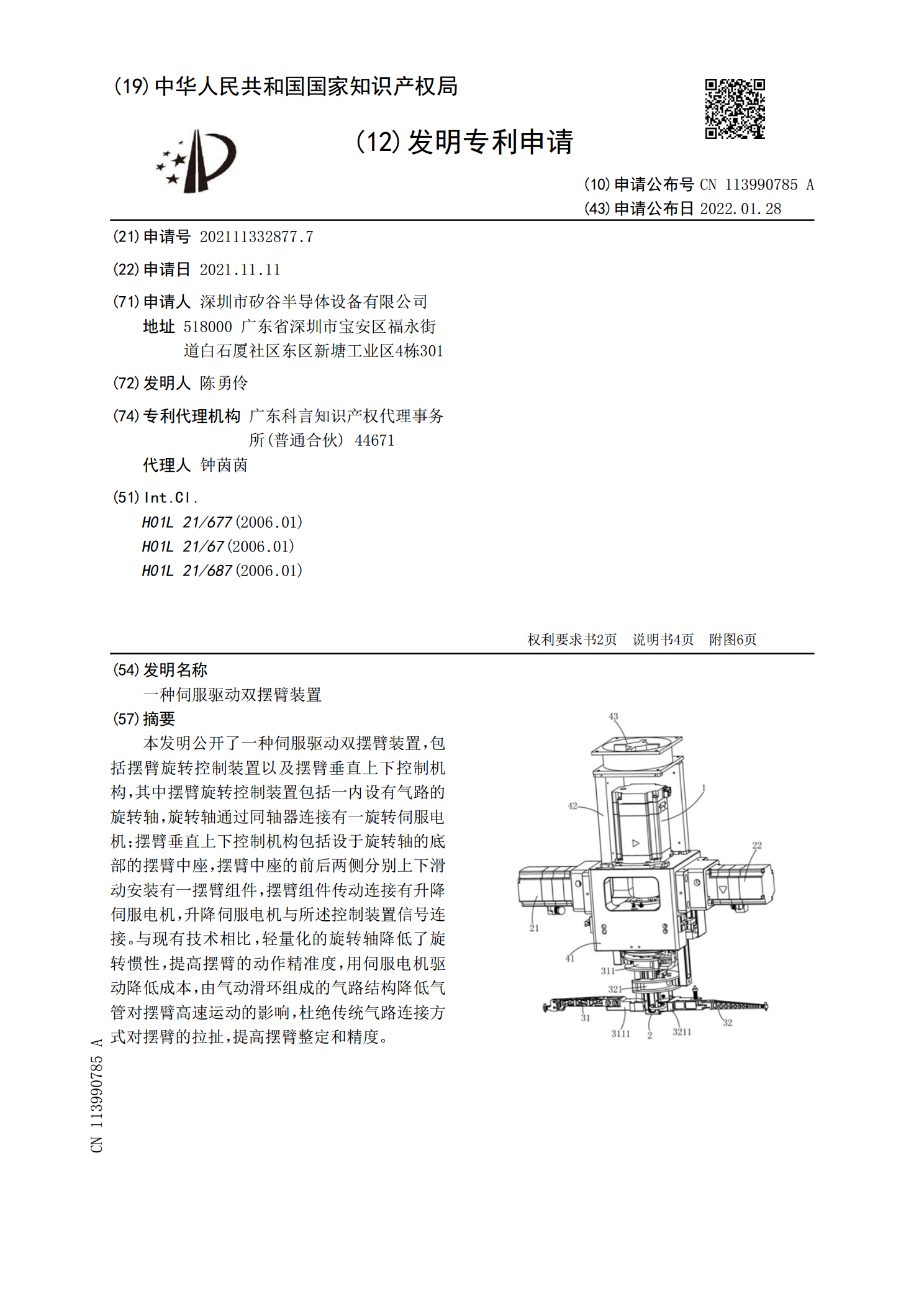
本发明公开了一种伺服驱动双摆臂装置,包括摆臂旋转控制装置以及摆臂垂直上下控制机构,其中摆臂旋转控制装置包括一内设有气路的旋转轴,旋转轴通过同轴器连接有一旋转伺服电机;摆臂垂直上下控制机构包括设于旋转轴的底部的摆臂中座,摆臂中座的前后两侧分别上下滑动安装有一摆臂组件,摆臂组件传动连接有升降伺服电机,升降伺服电机与所述控制装置信号连接。与现有技术相比,轻量化的旋转轴降低了旋转惯性,提高摆臂的动作精准度,用伺服电机驱动降低成本,由气动滑环组成的气路结构降低气管对摆臂高速运动的影响,杜绝传统气路连接方式对摆臂的拉
一种单电机驱动往复式转动装置.pdf
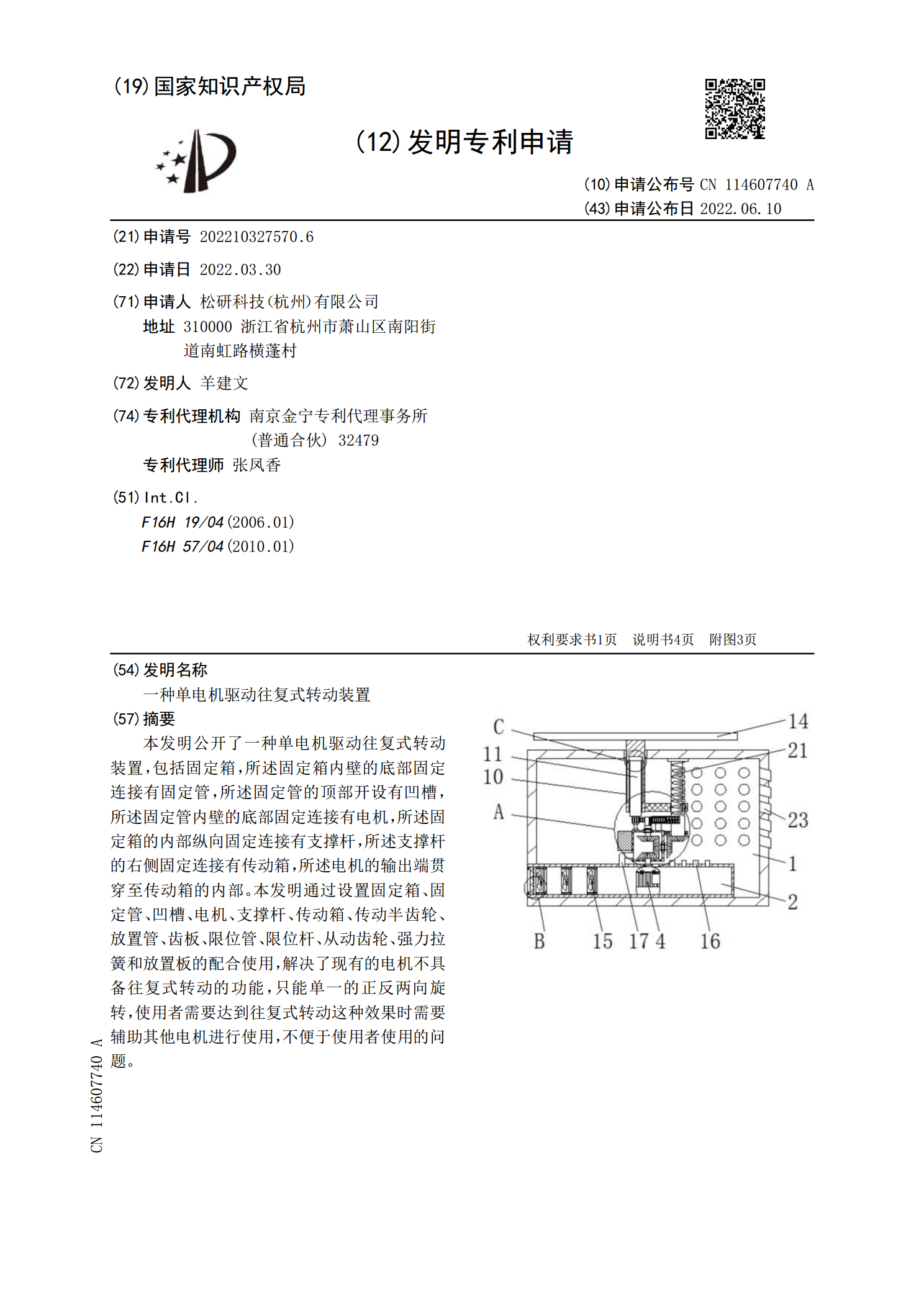
本发明公开了一种单电机驱动往复式转动装置,包括固定箱,所述固定箱内壁的底部固定连接有固定管,所述固定管的顶部开设有凹槽,所述固定管内壁的底部固定连接有电机,所述固定箱的内部纵向固定连接有支撑杆,所述支撑杆的右侧固定连接有传动箱,所述电机的输出端贯穿至传动箱的内部。本发明通过设置固定箱、固定管、凹槽、电机、支撑杆、传动箱、传动半齿轮、放置管、齿板、限位管、限位杆、从动齿轮、强力拉簧和放置板的配合使用,解决了现有的电机不具备往复式转动的功能,只能单一的正反两向旋转,使用者需要达到往复式转动这种效果时需要辅助其
一种装车机用摆臂驱动装置.pdf
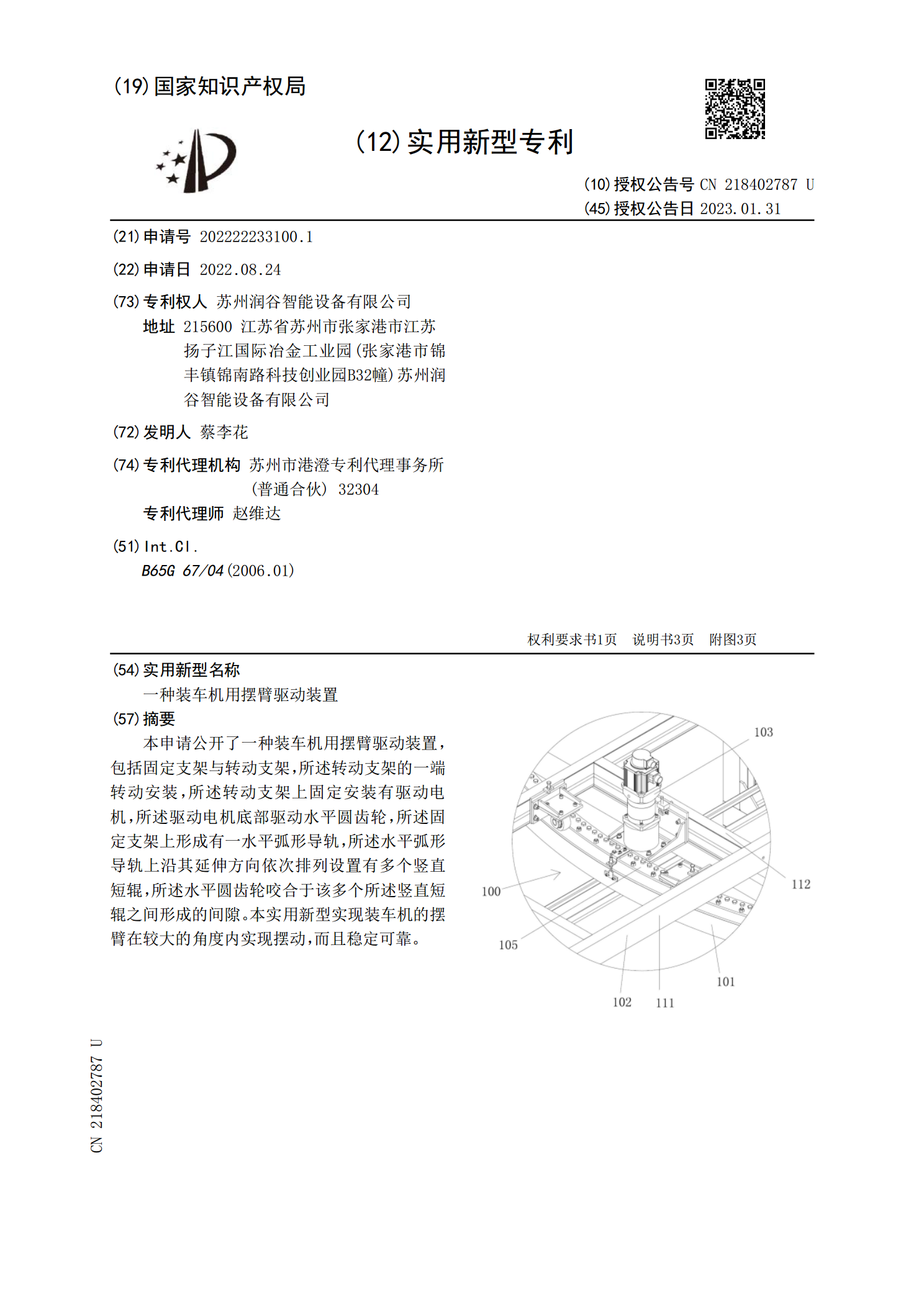
本申请公开了一种装车机用摆臂驱动装置,包括固定支架与转动支架,所述转动支架的一端转动安装,所述转动支架上固定安装有驱动电机,所述驱动电机底部驱动水平圆齿轮,所述固定支架上形成有一水平弧形导轨,所述水平弧形导轨上沿其延伸方向依次排列设置有多个竖直短辊,所述水平圆齿轮咬合于该多个所述竖直短辊之间形成的间隙。本实用新型实现装车机的摆臂在较大的角度内实现摆动,而且稳定可靠。