
基于三次样条曲线的码垛机器人平滑轨迹规划方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于三次样条曲线的码垛机器人平滑轨迹规划方法.docx
基于三次样条曲线的码垛机器人平滑轨迹规划方法基于三次样条曲线的码垛机器人平滑轨迹规划方法摘要:码垛机器人作为现代物流系统中的关键设备之一,在自动化仓储和物料搬运中发挥着重要作用。为了提高码垛机器人的运动轨迹规划效果,本文提出了一种基于三次样条曲线的平滑轨迹规划方法。通过对三次样条曲线的数学原理和算法进行研究,结合码垛机器人的运动特性,采用优化算法对机器人的运动轨迹进行规划,实现了机器人运动的平滑和高精度。实验结果表明,所提出的方法在提高码垛机器人运动效果方面具有显著优势。关键词:码垛机器人;平滑轨迹规划;
基于改进三次B样条曲线的空中目标航迹平滑方法及系统.pdf
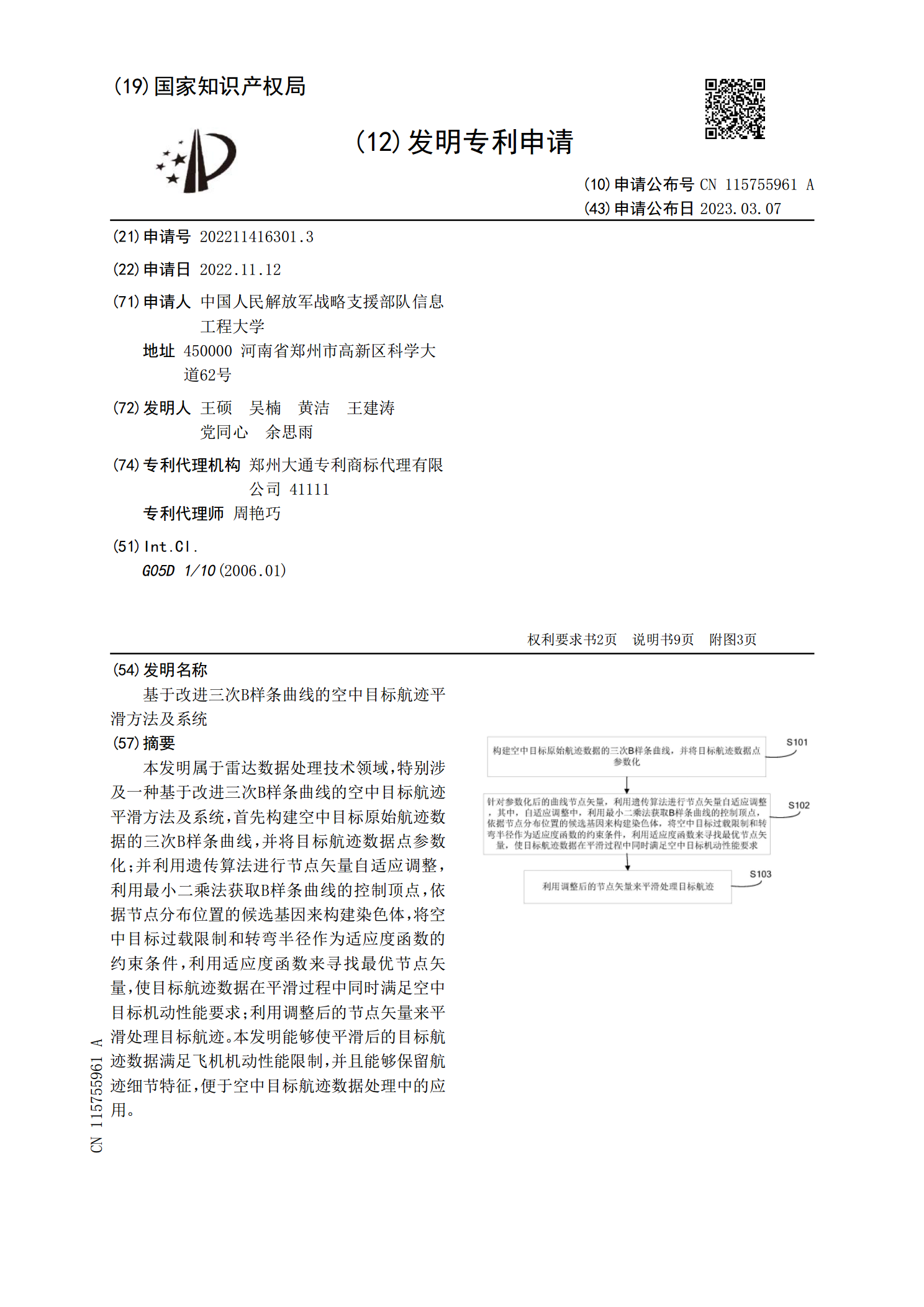
本发明属于雷达数据处理技术领域,特别涉及一种基于改进三次B样条曲线的空中目标航迹平滑方法及系统,首先构建空中目标原始航迹数据的三次B样条曲线,并将目标航迹数据点参数化;并利用遗传算法进行节点矢量自适应调整,利用最小二乘法获取B样条曲线的控制顶点,依据节点分布位置的候选基因来构建染色体,将空中目标过载限制和转弯半径作为适应度函数的约束条件,利用适应度函数来寻找最优节点矢量,使目标航迹数据在平滑过程中同时满足空中目标机动性能要求;利用调整后的节点矢量来平滑处理目标航迹。本发明能够使平滑后的目标航迹数据满足飞机

一种基于B样条曲线优化的移动机器人路径平滑方法.pdf
本发明公开了一种基于B样条曲线优化的移动机器人路径平滑方法。包括:获取路径规划方法输出的路径,将路径中的一个路径点作为待处理路径点,在当前待处理路径点上设置控制点序列;设置节点向量,从而生成当前待处理路径点的B样条曲线;对当前待处理路径点的B样条曲线分别进行线段碰撞检测和曲线碰撞检测,并调整控制点序列,直至完成当前待处理路径点的路径平滑;遍历剩余路径点,对剩余路径点的路径线段进行平滑处理,最终实现当前路径的平滑优化。本发明以B样条曲线优化的方式提高了平滑过程的效率和平滑后路径的性能指标,并通过保留原始路径

基于三次参数样条的机器人路径平滑算法研究.docx
基于三次参数样条的机器人路径平滑算法研究摘要机器人路径规划是机器人领域中的核心技术之一。路径规划需要将机器人移动轨迹规划成一条平滑的曲线,以保证机器人的运动平稳、无卡顿。本文提出一种基于三次参数样条的机器人路径平滑算法,该算法在不影响路径的基础上实现曲线的平滑性。在算法的实现中,使用了3个关键点来控制曲线的形状,以拟合机器人的运动路径。在算法的测试中,本文证明该方法能够有效地平滑机器人的移动路径,并且运算速度较快,具有较高的实用性。关键词:机器人路径规划,三次参数样条,路径平滑一、背景随着机器人技术的不断

基于三次参数样条的机器人路径平滑算法研究.pptx
,CONTENTS01.02.三次参数样条的定义和性质三次参数样条在路径平滑中的应用三次参数样条的数学模型三次参数样条的优化方法03.机器人路径规划概述基于三次参数样条的路径平滑算法原理算法实现流程算法复杂度分析04.实验环境与数据集实验过程与结果结果分析算法性能评估05.算法优点算法缺点改进方向未来研究展望06.研究成果总结对机器人路径规划领域的贡献对未来研究的指导意义感谢您的观看!