
一种基于B样条曲线优化的移动机器人路径平滑方法.pdf

一条****然后


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于B样条曲线优化的移动机器人路径平滑方法.pdf
本发明公开了一种基于B样条曲线优化的移动机器人路径平滑方法。包括:获取路径规划方法输出的路径,将路径中的一个路径点作为待处理路径点,在当前待处理路径点上设置控制点序列;设置节点向量,从而生成当前待处理路径点的B样条曲线;对当前待处理路径点的B样条曲线分别进行线段碰撞检测和曲线碰撞检测,并调整控制点序列,直至完成当前待处理路径点的路径平滑;遍历剩余路径点,对剩余路径点的路径线段进行平滑处理,最终实现当前路径的平滑优化。本发明以B样条曲线优化的方式提高了平滑过程的效率和平滑后路径的性能指标,并通过保留原始路径
基于改进三次B样条曲线的空中目标航迹平滑方法及系统.pdf
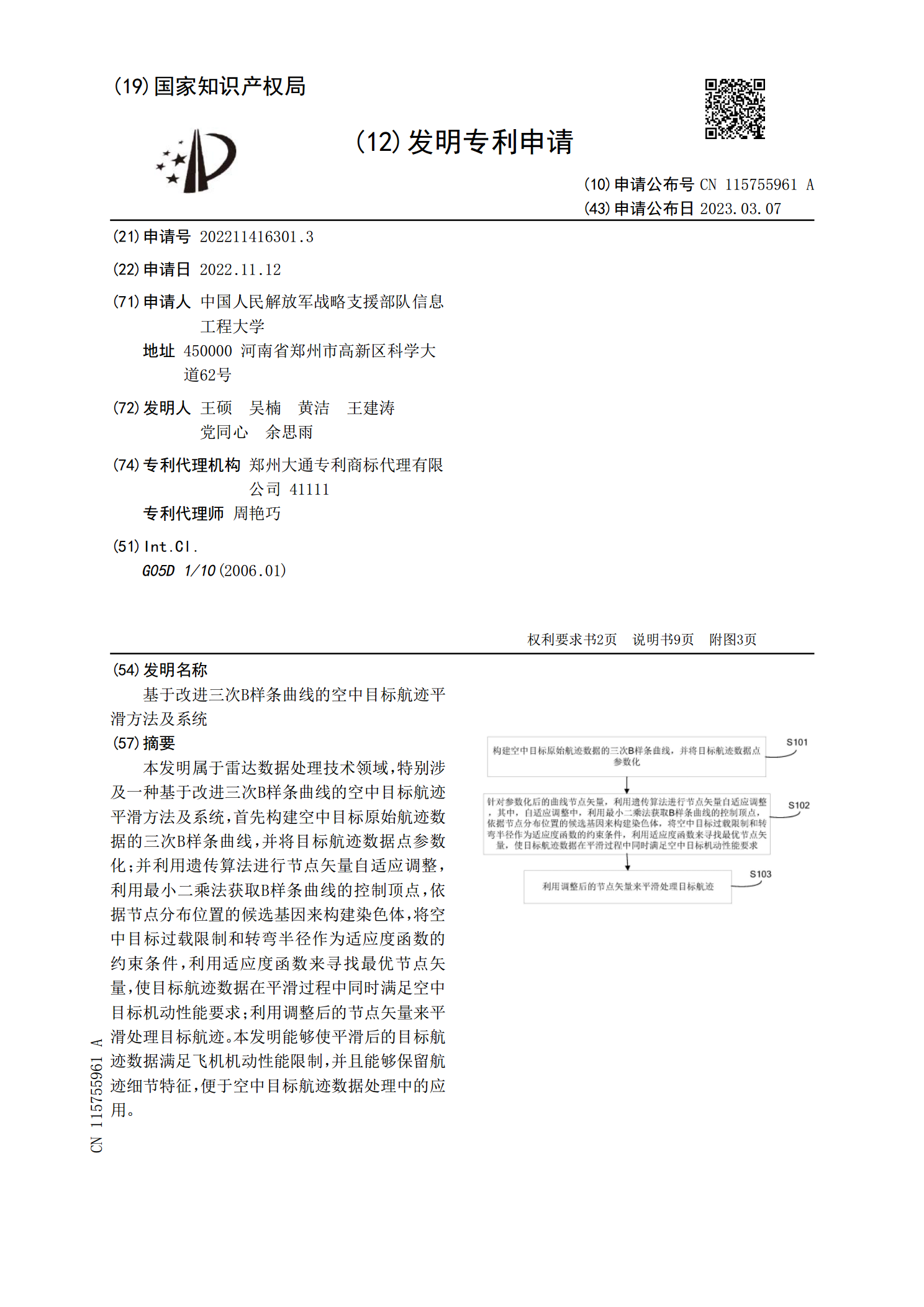
本发明属于雷达数据处理技术领域,特别涉及一种基于改进三次B样条曲线的空中目标航迹平滑方法及系统,首先构建空中目标原始航迹数据的三次B样条曲线,并将目标航迹数据点参数化;并利用遗传算法进行节点矢量自适应调整,利用最小二乘法获取B样条曲线的控制顶点,依据节点分布位置的候选基因来构建染色体,将空中目标过载限制和转弯半径作为适应度函数的约束条件,利用适应度函数来寻找最优节点矢量,使目标航迹数据在平滑过程中同时满足空中目标机动性能要求;利用调整后的节点矢量来平滑处理目标航迹。本发明能够使平滑后的目标航迹数据满足飞机

基于B样条优化的改进纯追踪农机导航曲线跟踪方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于B样条优化的改进纯追踪农机导航曲线跟踪方法1.内容简述本文提出了一种改进的纯追踪农机导航曲线跟踪方法,该方法基于B样条优化技术,旨在提高农机在复杂地形条件下的曲线跟踪精度和效率。本文介绍了纯追踪农机导航曲线的概念及其在农业机械化中的重要性。对现有的曲线跟踪方法进行了综述,指出了其在面对复杂地形时的不足之处。在此基础上,本文提出了一种结合B样条优化的改进方法,详细阐述了该方法的理论基础、算法实现步骤以及优点。本文首先定义了B样条曲线的表示形式,并分析
一种基于NURBS曲线的切割路径优化方法.pdf
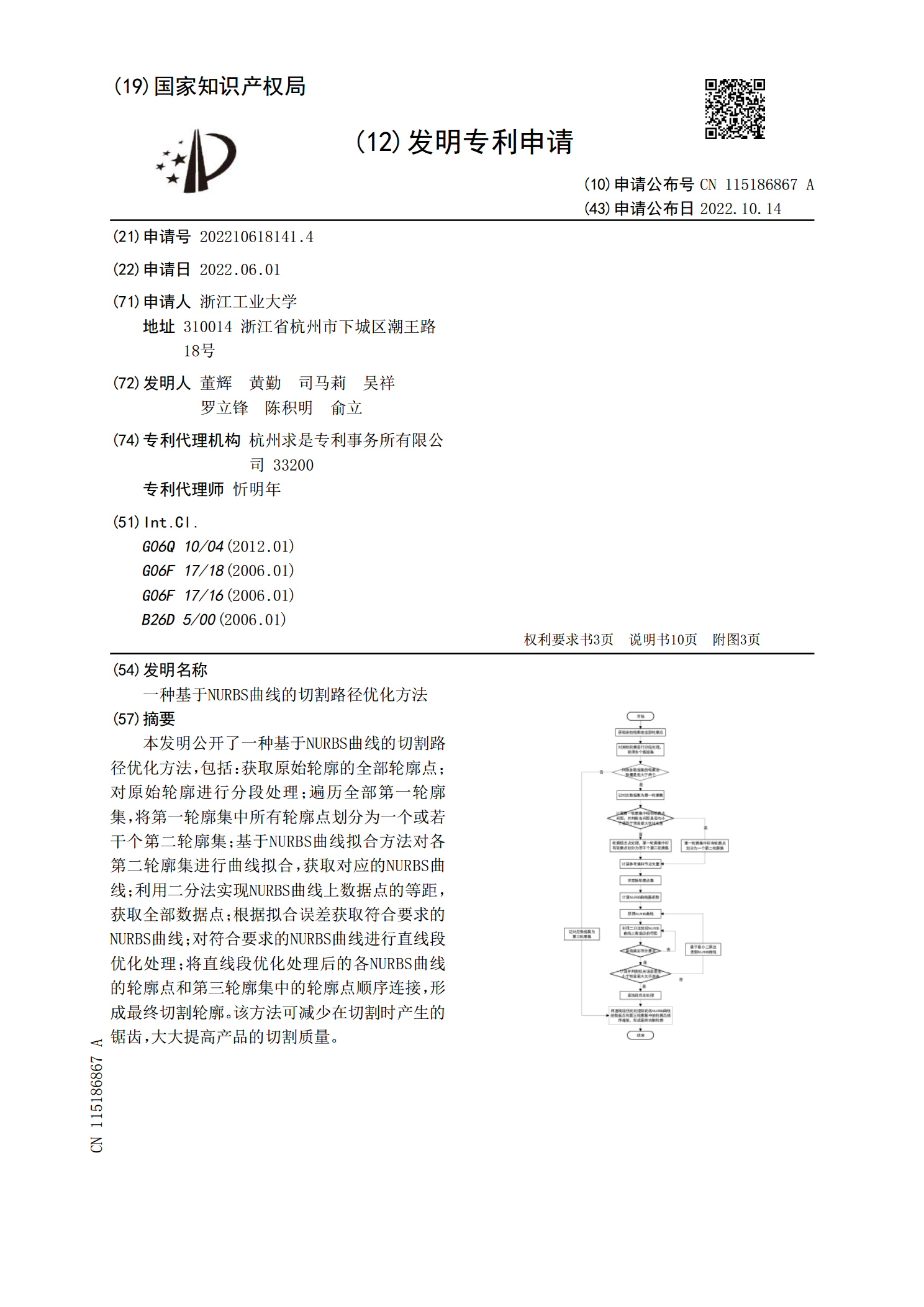
本发明公开了一种基于NURBS曲线的切割路径优化方法,包括:获取原始轮廓的全部轮廓点;对原始轮廓进行分段处理;遍历全部第一轮廓集,将第一轮廓集中所有轮廓点划分为一个或若干个第二轮廓集;基于NURBS曲线拟合方法对各第二轮廓集进行曲线拟合,获取对应的NURBS曲线;利用二分法实现NURBS曲线上数据点的等距,获取全部数据点;根据拟合误差获取符合要求的NURBS曲线;对符合要求的NURBS曲线进行直线段优化处理;将直线段优化处理后的各NURBS曲线的轮廓点和第三轮廓集中的轮廓点顺序连接,形成最终切割轮廓。该方

基于路径单元的测量轮廓偏差的样条曲线补偿方法.pdf
本发明属于数控加工技术领域,特别涉及一种基于路径单元的测量轮廓偏差的样条曲线补偿方法。包括:选定轮廓测量点逐一进行测量,并计算各测量点测量数据与基准轮廓数据的偏差;将计算出的各点偏差数据映射到坐标系中,采用样条曲线将各偏差数据点连接起来;从样条曲线上获取每个加工点的偏差值;将偏差值补偿到对应的路径点中。本发明以路径单元为对象,采用样条误差补偿的方式,有效避免了线性方法造成的不光滑路径拐点,补偿路径更加光顺,满足了高精高速加工要求,同时获得更佳的表面效果,可以完成对较大变形量工件的路径补偿;并且简单易用,编