
基于改进三次B样条曲线的空中目标航迹平滑方法及系统.pdf

一吃****天材

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进三次B样条曲线的空中目标航迹平滑方法及系统.pdf
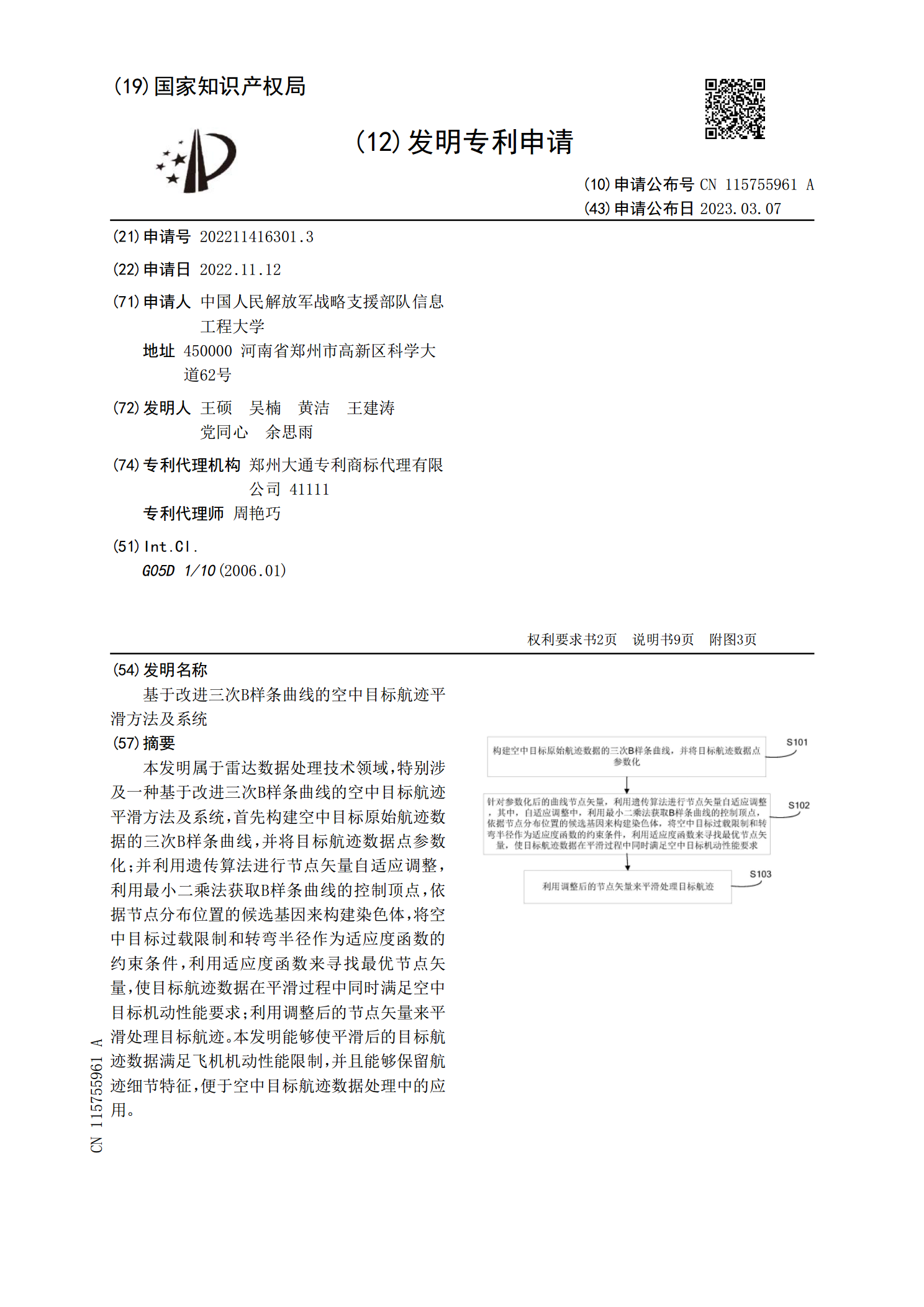
本发明属于雷达数据处理技术领域,特别涉及一种基于改进三次B样条曲线的空中目标航迹平滑方法及系统,首先构建空中目标原始航迹数据的三次B样条曲线,并将目标航迹数据点参数化;并利用遗传算法进行节点矢量自适应调整,利用最小二乘法获取B样条曲线的控制顶点,依据节点分布位置的候选基因来构建染色体,将空中目标过载限制和转弯半径作为适应度函数的约束条件,利用适应度函数来寻找最优节点矢量,使目标航迹数据在平滑过程中同时满足空中目标机动性能要求;利用调整后的节点矢量来平滑处理目标航迹。本发明能够使平滑后的目标航迹数据满足飞机

基于三次样条曲线的码垛机器人平滑轨迹规划方法.docx
基于三次样条曲线的码垛机器人平滑轨迹规划方法基于三次样条曲线的码垛机器人平滑轨迹规划方法摘要:码垛机器人作为现代物流系统中的关键设备之一,在自动化仓储和物料搬运中发挥着重要作用。为了提高码垛机器人的运动轨迹规划效果,本文提出了一种基于三次样条曲线的平滑轨迹规划方法。通过对三次样条曲线的数学原理和算法进行研究,结合码垛机器人的运动特性,采用优化算法对机器人的运动轨迹进行规划,实现了机器人运动的平滑和高精度。实验结果表明,所提出的方法在提高码垛机器人运动效果方面具有显著优势。关键词:码垛机器人;平滑轨迹规划;

基于改进Kalman滤波算法的航迹平滑.docx
基于改进Kalman滤波算法的航迹平滑摘要随着航空技术的不断发展,航迹平滑技术的重要性也愈发突显。本文针对目前常用的Kalman滤波算法存在的一些问题,提出了一种改进方法,并通过实验验证了其有效性。结果表明,改进Kalman滤波算法在航迹平滑中具有较好的应用效果,能够有效提高航迹平滑的准确性和精度,适用于航空领域的航迹跟踪和导航等方面的应用。关键词:航迹平滑;Kalman滤波;改进算法;航空领域;精度一、引言航迹平滑技术是航空领域的重要技术之一,主要应用于航迹的跟踪和导航等领域。在航空领域中,由于传感器的

基于B样条优化的改进纯追踪农机导航曲线跟踪方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于B样条优化的改进纯追踪农机导航曲线跟踪方法1.内容简述本文提出了一种改进的纯追踪农机导航曲线跟踪方法,该方法基于B样条优化技术,旨在提高农机在复杂地形条件下的曲线跟踪精度和效率。本文介绍了纯追踪农机导航曲线的概念及其在农业机械化中的重要性。对现有的曲线跟踪方法进行了综述,指出了其在面对复杂地形时的不足之处。在此基础上,本文提出了一种结合B样条优化的改进方法,详细阐述了该方法的理论基础、算法实现步骤以及优点。本文首先定义了B样条曲线的表示形式,并分析

B样条理论在无人机航迹平滑中的应用.docx
B样条理论在无人机航迹平滑中的应用B样条理论在无人机航迹平滑中的应用摘要:随着无人机技术的飞速发展,无人机航迹规划和平滑飞行成为了一个热门的研究领域。B样条理论作为一种数学工具,在无人机航迹平滑中发挥了重要作用。本文将介绍B样条理论的基本概念和原理,并探讨其在无人机航迹平滑中的应用。通过优化航迹的曲率和速度,B样条理论可以使无人机飞行更加平滑和高效,提高飞行安全性和稳定性。1.引言随着无人机技术的飞速发展,无人机应用领域不断扩大,包括农业、测绘、电力巡检等。在无人机的应用过程中,航迹规划和平滑飞行是一项非