
一种顾及地形的点云自适应坡度滤波方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种顾及地形的点云自适应坡度滤波方法.docx
一种顾及地形的点云自适应坡度滤波方法摘要:点云是一种重要的三维数据表示形式,它广泛应用于几何建模、遥感、计算机辅助设计等领域。然而,在实际应用中,由于不同地形条件的影响,点云数据中可能存在噪声、遮挡和稀疏等问题,从而影响对地形信息的理解和应用。本文提出了一种基于自适应坡度滤波的点云处理方法,可以有效的去除噪声、填补稀疏区域、修复遮挡信息,同时保留地形细节信息。实验结果表明,该方法具有较好的去噪和稠密化效果,同时能够针对不同地形条件进行自适应调整,具有很高的实用性。关键词:点云、地形、自适应坡度滤波、去噪、

一种顾及地形复杂度的LiDAR点云多尺度滤波方法.docx
一种顾及地形复杂度的LiDAR点云多尺度滤波方法LiDAR(光探测与测距)技术已经广泛应用于三维地形建模、精准测量等领域中。在LiDAR数据处理中,滤波是一个非常重要的步骤。在地形复杂度较高的区域,传统的滤波算法可能无法满足精度要求。因此,我们提出了一种顾及地形复杂度的LiDAR点云多尺度滤波方法。本文提出的方法在滤波过程中,采用多尺度分析的思想来考虑地形复杂度对滤波效果的影响。具体来说,我们将点云数据分解为不同的尺度层次,并在每个层次上分别进行滤波操作,以达到滤除噪声的目的。同时,我们还提出了一种自适应

基于自适应坡度的无人机载LiDAR点云滤波方法.pdf
本发明提供的基于自适应坡度的无人机载LiDAR点云滤波方法,包括步骤1:获取测区内的点云数据,对点云数据进行滤波;步骤2:对点云数据建立索引;步骤3:计算并保留格网内的最优平面;步骤4:选择预设窗口内的高程最低点作为地面点的初始种子点;步骤5:计算最优平面和地面点之间的距离,以及该地面点到最优平面中心的坡度,根据坡度阈值获取地面点集;步骤6:将初始地面点集中的点作为基点,采用反距离加权插值法生成数字地面模型;步骤7:通过新生的数字地面模型,获取坡度阈值的更新值,重复迭代步骤4~步骤6,获取最终的地面点集。
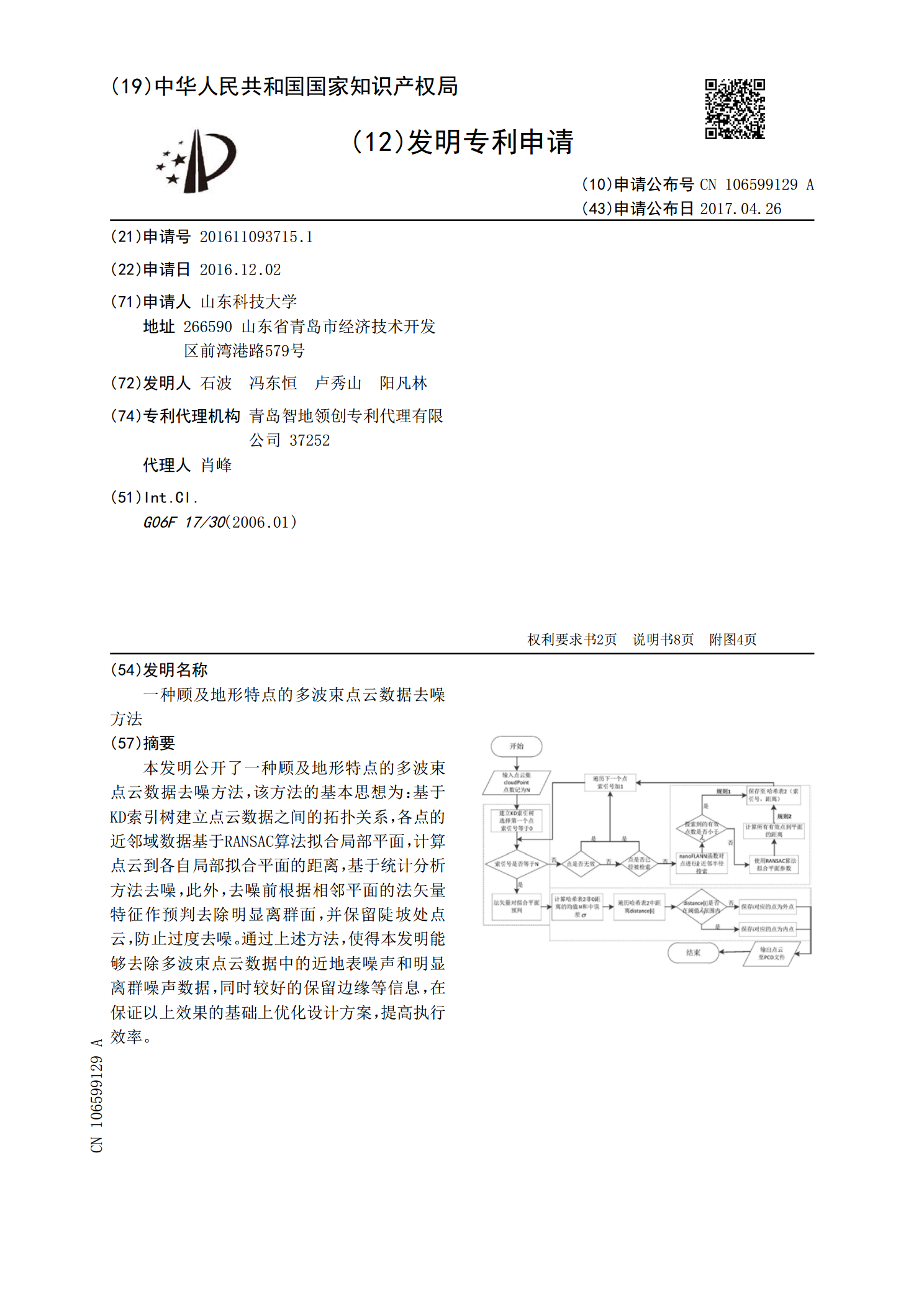
一种顾及地形特点的多波束点云数据去噪方法.pdf
本发明公开了一种顾及地形特点的多波束点云数据去噪方法,该方法的基本思想为:基于KD索引树建立点云数据之间的拓扑关系,各点的近邻域数据基于RANSAC算法拟合局部平面,计算点云到各自局部拟合平面的距离,基于统计分析方法去噪,此外,去噪前根据相邻平面的法矢量特征作预判去除明显离群面,并保留陡坡处点云,防止过度去噪。通过上述方法,使得本发明能够去除多波束点云数据中的近地表噪声和明显离群噪声数据,同时较好的保留边缘等信息,在保证以上效果的基础上优化设计方案,提高执行效率。

基于改进坡度的自适应数学形态学点云滤波.docx
基于改进坡度的自适应数学形态学点云滤波标题:基于改进坡度的自适应数学形态学点云滤波摘要:随着三维扫描技术的发展,点云数据在各种应用领域中得到了广泛的应用。然而,点云数据的噪声和离群点常常会对后续处理任务的准确性和效率产生负面影响。因此,点云滤波技术的研究和改进变得尤为重要。本文提出了一种基于改进坡度的自适应数学形态学点云滤波方法,通过对点云数据进行降噪和离群点去除,提高了点云数据的质量和可用性。1.引言点云数据作为一种描述物体三维形态的工具,广泛应用于机器人感知、地图构建、虚拟现实等领域。然而,由于传感器