
基于改进坡度的自适应数学形态学点云滤波.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进坡度的自适应数学形态学点云滤波.docx
基于改进坡度的自适应数学形态学点云滤波标题:基于改进坡度的自适应数学形态学点云滤波摘要:随着三维扫描技术的发展,点云数据在各种应用领域中得到了广泛的应用。然而,点云数据的噪声和离群点常常会对后续处理任务的准确性和效率产生负面影响。因此,点云滤波技术的研究和改进变得尤为重要。本文提出了一种基于改进坡度的自适应数学形态学点云滤波方法,通过对点云数据进行降噪和离群点去除,提高了点云数据的质量和可用性。1.引言点云数据作为一种描述物体三维形态的工具,广泛应用于机器人感知、地图构建、虚拟现实等领域。然而,由于传感器

基于自适应坡度的无人机载LiDAR点云滤波方法.pdf
本发明提供的基于自适应坡度的无人机载LiDAR点云滤波方法,包括步骤1:获取测区内的点云数据,对点云数据进行滤波;步骤2:对点云数据建立索引;步骤3:计算并保留格网内的最优平面;步骤4:选择预设窗口内的高程最低点作为地面点的初始种子点;步骤5:计算最优平面和地面点之间的距离,以及该地面点到最优平面中心的坡度,根据坡度阈值获取地面点集;步骤6:将初始地面点集中的点作为基点,采用反距离加权插值法生成数字地面模型;步骤7:通过新生的数字地面模型,获取坡度阈值的更新值,重复迭代步骤4~步骤6,获取最终的地面点集。

基于改进的坡度滤波算法的LiDAR数据滤波.docx
基于改进的坡度滤波算法的LiDAR数据滤波摘要:随着激光雷达技术的发展,激光雷达技术的应用越来越广泛。但是由于受噪声干扰和多次反射等因素的影响,激光雷达数据中常常存在一些错误的测量点。因此,滤波是激光雷达数据处理的一个重要步骤。本文提出了一种基于改进的坡度滤波算法的LiDAR数据滤波方法,该方法首先对地面点进行分类,接着通过改进的坡度滤波算法对非地面点进行滤波处理。最后,对滤波后的数据进行验证,结果表明该方法能够有效地过滤掉非地面点,提高数据质量。关键词:激光雷达;滤波算法;坡度滤波;地面点;非地面点1.

一种顾及地形的点云自适应坡度滤波方法.docx
一种顾及地形的点云自适应坡度滤波方法摘要:点云是一种重要的三维数据表示形式,它广泛应用于几何建模、遥感、计算机辅助设计等领域。然而,在实际应用中,由于不同地形条件的影响,点云数据中可能存在噪声、遮挡和稀疏等问题,从而影响对地形信息的理解和应用。本文提出了一种基于自适应坡度滤波的点云处理方法,可以有效的去除噪声、填补稀疏区域、修复遮挡信息,同时保留地形细节信息。实验结果表明,该方法具有较好的去噪和稠密化效果,同时能够针对不同地形条件进行自适应调整,具有很高的实用性。关键词:点云、地形、自适应坡度滤波、去噪、
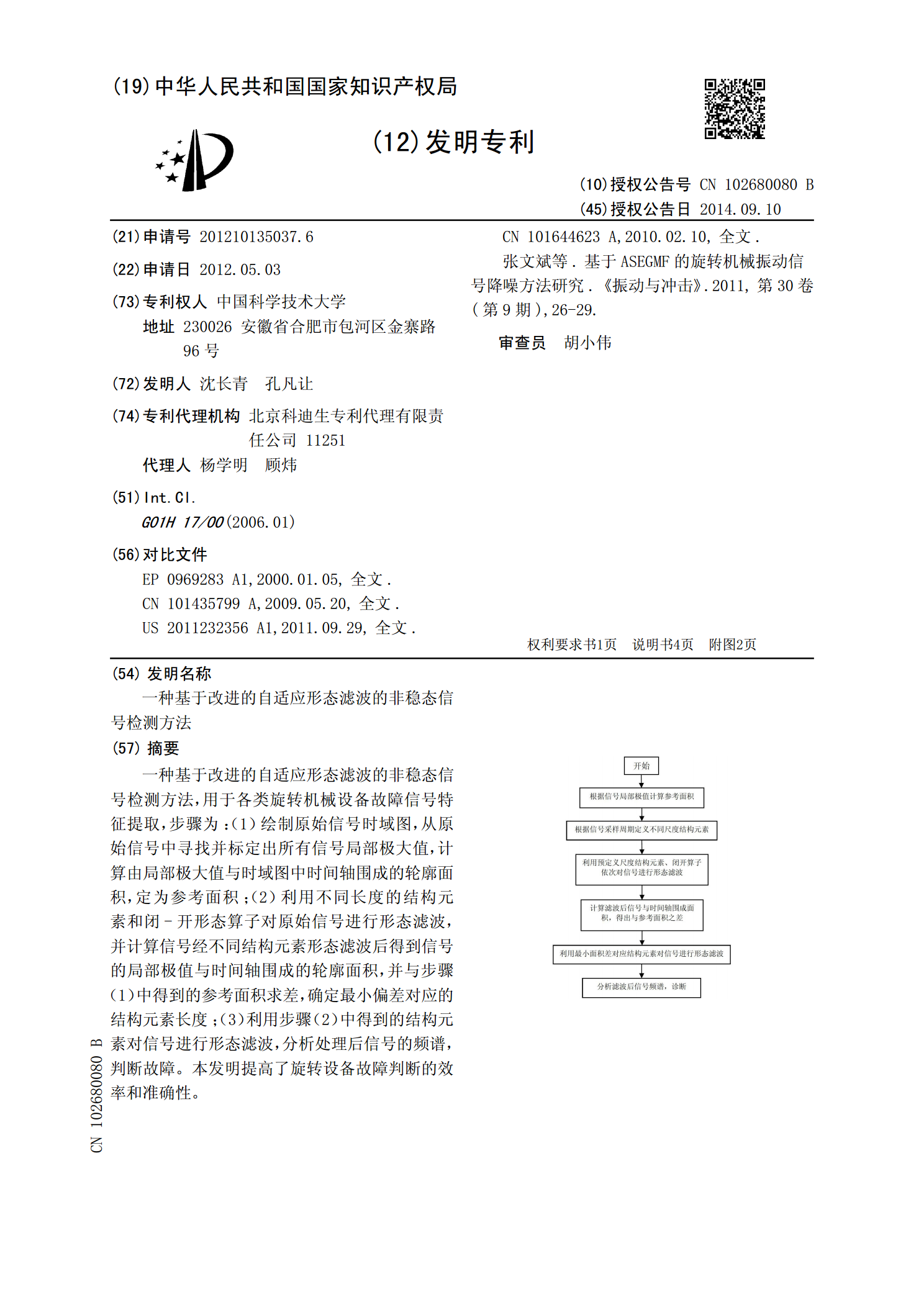
一种基于改进的自适应形态滤波的非稳态信号检测方法.pdf
一种基于改进的自适应形态滤波的非稳态信号检测方法,用于各类旋转机械设备故障信号特征提取,步骤为:(1)绘制原始信号时域图,从原始信号中寻找并标定出所有信号局部极大值,计算由局部极大值与时域图中时间轴围成的轮廓面积,定为参考面积;(2)利用不同长度的结构元素和闭-开形态算子对原始信号进行形态滤波,并计算信号经不同结构元素形态滤波后得到信号的局部极值与时间轴围成的轮廓面积,并与步骤(1)中得到的参考面积求差,确定最小偏差对应的结构元素长度;(3)利用步骤(2)中得到的结构元素对信号进行形态滤波,分析处理后信号