
基于自适应坡度的无人机载LiDAR点云滤波方法.pdf

俊英****22


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自适应坡度的无人机载LiDAR点云滤波方法.pdf
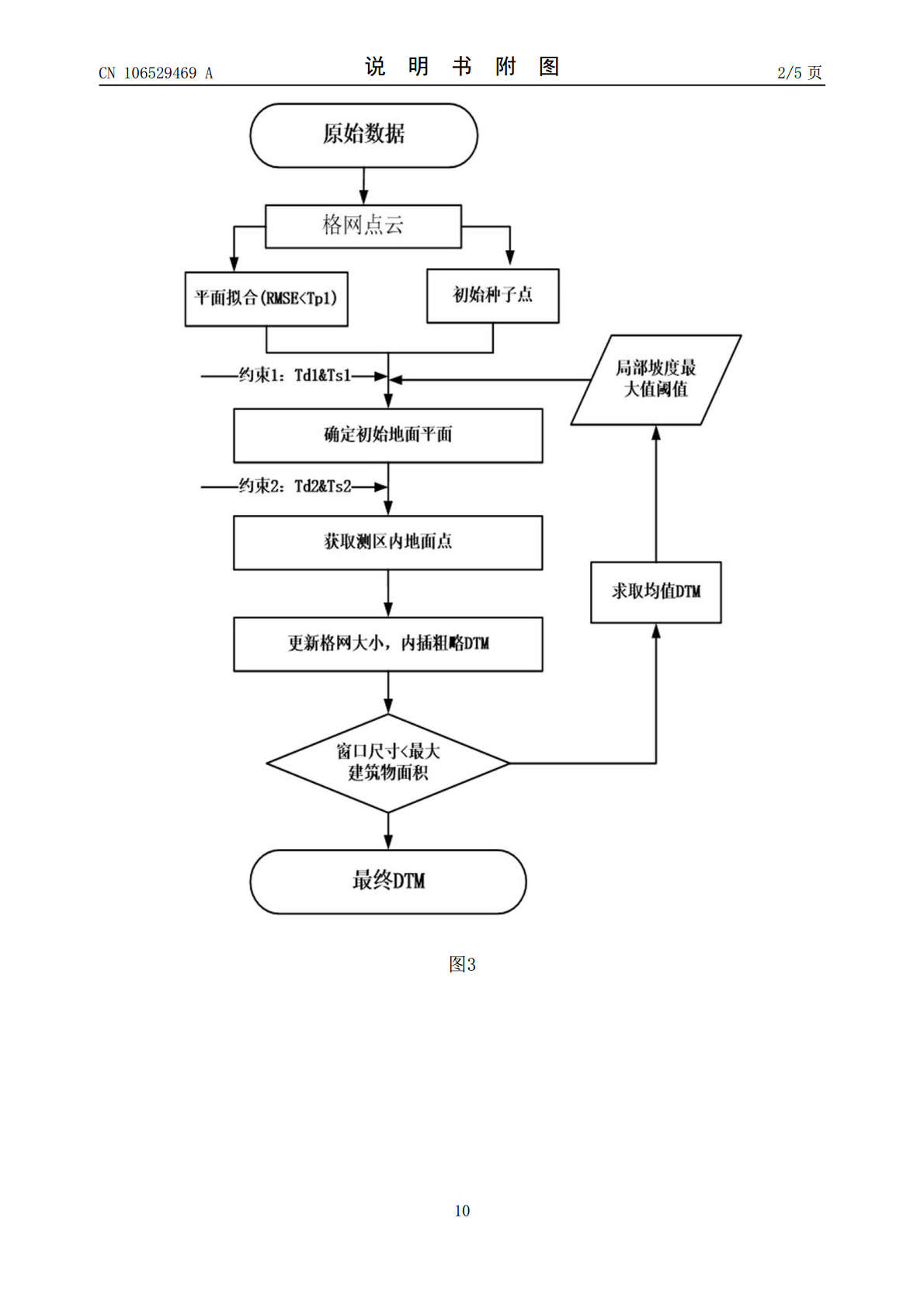
本发明提供的基于自适应坡度的无人机载LiDAR点云滤波方法,包括步骤1:获取测区内的点云数据,对点云数据进行滤波;步骤2:对点云数据建立索引;步骤3:计算并保留格网内的最优平面;步骤4:选择预设窗口内的高程最低点作为地面点的初始种子点;步骤5:计算最优平面和地面点之间的距离,以及该地面点到最优平面中心的坡度,根据坡度阈值获取地面点集;步骤6:将初始地面点集中的点作为基点,采用反距离加权插值法生成数字地面模型;步骤7:通过新生的数字地面模型,获取坡度阈值的更新值,重复迭代步骤4~步骤6,获取最终的地面点集。

基于机载LiDAR点云数据滤波方法研究.docx
基于机载LiDAR点云数据滤波方法研究随着无人机技术的飞速发展和机载激光雷达技术的广泛应用,机载激光雷达点云数据成为了获取高精度三维地形地貌信息的主要手段之一。然而,机载激光雷达点云数据通常存在噪点、杂点等不良影响,这对数据的精度和可靠性造成了一定的影响。因此,点云数据滤波方法的研究及应用显得尤为重要。一、LiDAR点云数据滤波的意义机载激光雷达点云数据通常由成千上百万个点组成,包括地面、建筑、树木、电线杆等多种类别的物体。而在实际应用过程中,一些不良影响如多次反射、大气干扰、地面杂物等会引入一些特殊的噪

基于深度学习的机载LiDAR点云滤波方法研究.docx
基于深度学习的机载LiDAR点云滤波方法研究摘要:机载LiDAR点云数据在地理信息系统、城市规划、三维建模等领域有着广泛的应用,但点云数据存在着密度不均匀、噪声点、离群点等问题。本文提出了一种基于深度学习的点云滤波方法,利用卷积神经网络实现点云的自适应滤波处理。实验结果表明,该方法能够有效地滤除噪声点和离群点,提高了点云数据的质量和精度。一、引言机载LiDAR点云数据是一种重要的地理信息数据,被广泛应用于城市规划、交通管理、环境监测等领域。然而,由于数据采集方式和设备的限制,点云数据存在很多问题,包括噪声

基于坡度自适应的机载LiDAR分割算法.docx
基于坡度自适应的机载LiDAR分割算法基于坡度自适应的机载LiDAR分割算法摘要:近年来,机载激光雷达(LiDAR)技术得到了广泛应用,尤其在制图、三维重建和目标检测等领域发挥了重要作用。LiDAR数据由于其高精度和高空间分辨率的特点,成为对地面进行快速、准确建模的一种有效手段。然而,由于地形的复杂性和地物的多样性,对LiDAR数据进行准确的分割仍然面临挑战。本论文提出了一种基于坡度自适应的机载LiDAR分割算法,以提高地物分割的准确性和稳定性。1.引言机载LiDAR数据的分割是获取高质量地物模型和准确地

基于格网化LIDAR点云数据坡度滤波方法的研究.docx
基于格网化LIDAR点云数据坡度滤波方法的研究摘要:本文基于格网化LIDAR点云数据,提出了一种新的坡度滤波方法。该方法通过对坡度信息的提取和分析,可以有效地消除倾斜和噪声对点云数据的影响,从而提高数据的精度和可靠性。实验结果表明,该方法对于减小点云数据的噪声和提高数据的精度具有明显的效果,同时也具有较高的实用性。关键词:LIDAR点云,坡度滤波,格网化,噪声,精度1.背景近年来,随着激光雷达技术的发展和应用场景的不断拓展,LIDAR点云数据在建筑、地质、自然灾害等领域的应用越来越广泛。然而,在数据采集和