
一种顾及地形复杂度的LiDAR点云多尺度滤波方法.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种顾及地形复杂度的LiDAR点云多尺度滤波方法.docx
一种顾及地形复杂度的LiDAR点云多尺度滤波方法LiDAR(光探测与测距)技术已经广泛应用于三维地形建模、精准测量等领域中。在LiDAR数据处理中,滤波是一个非常重要的步骤。在地形复杂度较高的区域,传统的滤波算法可能无法满足精度要求。因此,我们提出了一种顾及地形复杂度的LiDAR点云多尺度滤波方法。本文提出的方法在滤波过程中,采用多尺度分析的思想来考虑地形复杂度对滤波效果的影响。具体来说,我们将点云数据分解为不同的尺度层次,并在每个层次上分别进行滤波操作,以达到滤除噪声的目的。同时,我们还提出了一种自适应

一种顾及地形的点云自适应坡度滤波方法.docx
一种顾及地形的点云自适应坡度滤波方法摘要:点云是一种重要的三维数据表示形式,它广泛应用于几何建模、遥感、计算机辅助设计等领域。然而,在实际应用中,由于不同地形条件的影响,点云数据中可能存在噪声、遮挡和稀疏等问题,从而影响对地形信息的理解和应用。本文提出了一种基于自适应坡度滤波的点云处理方法,可以有效的去除噪声、填补稀疏区域、修复遮挡信息,同时保留地形细节信息。实验结果表明,该方法具有较好的去噪和稠密化效果,同时能够针对不同地形条件进行自适应调整,具有很高的实用性。关键词:点云、地形、自适应坡度滤波、去噪、

基于地形复杂度的LiDAR点云简化方法研究的开题报告.docx
基于地形复杂度的LiDAR点云简化方法研究的开题报告一、选题的背景和意义随着LiDAR技术的发展及应用日益广泛,获取的点云数据也越来越大,而且不同区域的地形复杂度也越来越不同,这给点云数据的处理和分析带来了很大的挑战。在实际应用中,经常需要对点云数据进行简化,以减少数据量,提高处理效率,同时又不影响后续分析和应用。因此,开发基于地形复杂度的LiDAR点云简化方法具有重要的理论和实际意义。二、研究的目的和内容本研究的主要目的是设计一种基于地形复杂度的LiDAR点云简化方法,该方法不仅能够有效地保留地形信息和

顾及地形特征的LiDAR点云数据抽稀算法研究.docx
顾及地形特征的LiDAR点云数据抽稀算法研究标题:顾及地形特征的LiDAR点云数据抽稀算法研究摘要:随着激光雷达(LiDAR)技术的快速发展,高精度的三维点云数据逐渐成为地理信息系统(GIS)和地貌学等领域的重要数据源。然而,随着点云数据规模的不断增大,对点云数据进行高效处理和存储成为一个重要的问题。本论文提出了一种顾及地形特征的LiDAR点云数据抽稀算法,旨在识别和保留地形特征的同时减少数据量,提高点云数据的处理效率。第一章引言1.1研究背景1.2研究目的和意义1.3研究内容和结构第二章相关工作综述2.
一种顾及地形特点的多波束点云数据去噪方法.pdf
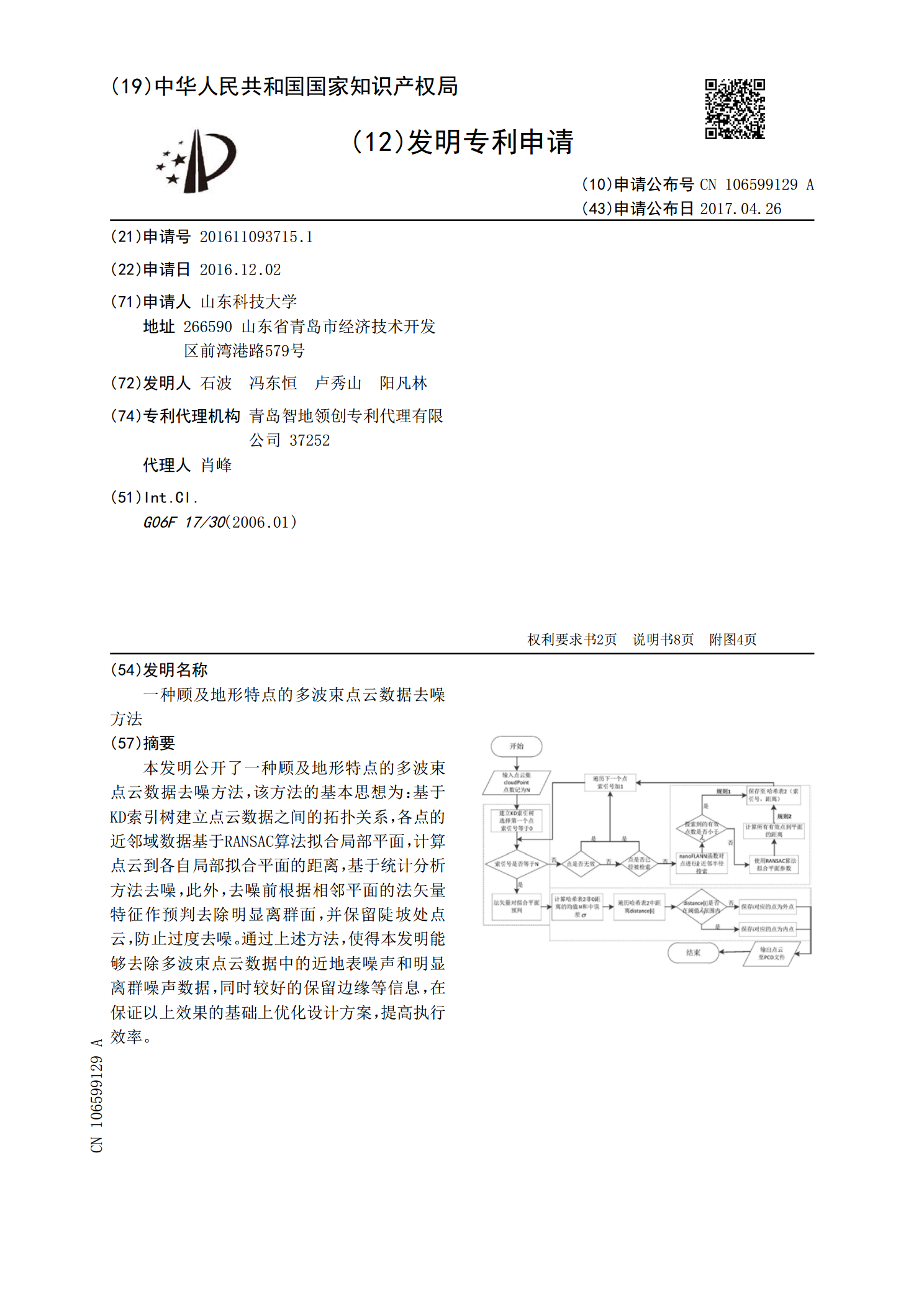
本发明公开了一种顾及地形特点的多波束点云数据去噪方法,该方法的基本思想为:基于KD索引树建立点云数据之间的拓扑关系,各点的近邻域数据基于RANSAC算法拟合局部平面,计算点云到各自局部拟合平面的距离,基于统计分析方法去噪,此外,去噪前根据相邻平面的法矢量特征作预判去除明显离群面,并保留陡坡处点云,防止过度去噪。通过上述方法,使得本发明能够去除多波束点云数据中的近地表噪声和明显离群噪声数据,同时较好的保留边缘等信息,在保证以上效果的基础上优化设计方案,提高执行效率。