
绳驱动仿人踝关节机构设计及其运动学分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

绳驱动仿人踝关节机构设计及其运动学分析.docx
绳驱动仿人踝关节机构设计及其运动学分析摘要:本文设计了一种基于绳驱动的仿人踝关节机构,分析了该机构的运动学特性,并进行了实验验证。该机构可以模拟人类踝关节的运动,具有较好的灵活性和稳定性。此外,该设计还可以应用于各种机器人和康复装置中,具有很高的研究和应用价值。关键词:绳驱动,仿人踝关节机构,运动学分析介绍:随着科技的发展,机器人和康复装置的需要越来越大。仿人机器人的关节设计对于机器人的运动控制很重要,而康复装置的设计也需要有更加高效和稳定的关节机构。因此,仿人踝关节机构是一个研究热点。目前,市面上的仿人

新型绳驱动并联踝关节康复机构设计及分析.docx
新型绳驱动并联踝关节康复机构设计及分析摘要:本文针对踝关节康复问题,提出了一种新型绳驱动并联踝关节康复机构。首先分析了现有康复机构存在的问题,并针对这些问题进行了设计改进。然后,详细介绍了新型机构的结构特点和工作原理,并给出了运动学和动力学模型。最后,通过仿真分析和实验验证,证明了新型机构具有较好的康复效果和运动性能。关键词:踝关节康复;绳驱动并联机构;结构特点;工作原理;仿真分析;实验验证1.引言踝关节是人体重要的运动关节之一,其功能障碍会对人体日常活动和运动能力造成严重影响。因此,踝关节康复被广泛关注
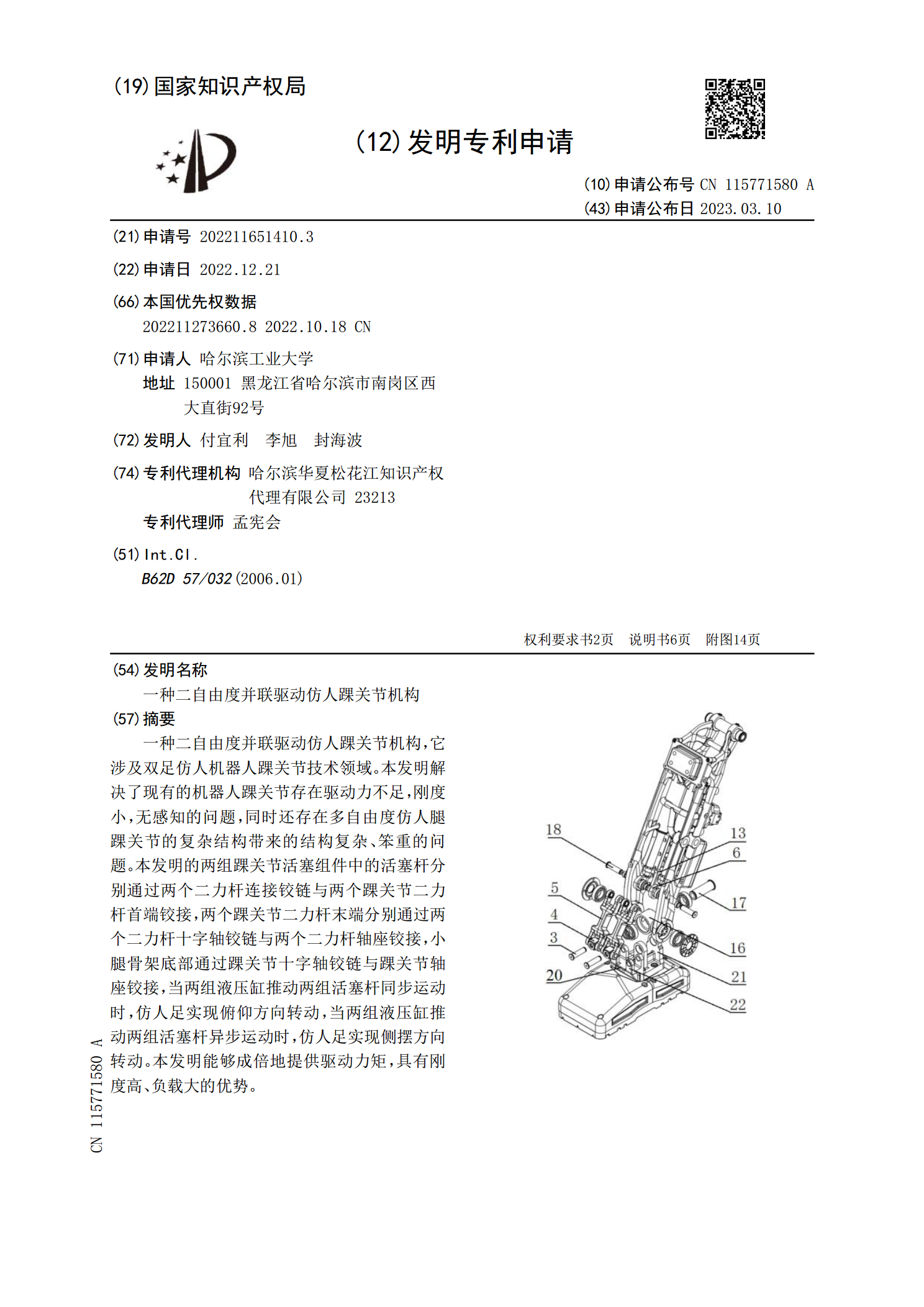
一种二自由度并联驱动仿人踝关节机构.pdf
一种二自由度并联驱动仿人踝关节机构,它涉及双足仿人机器人踝关节技术领域。本发明解决了现有的机器人踝关节存在驱动力不足,刚度小,无感知的问题,同时还存在多自由度仿人腿踝关节的复杂结构带来的结构复杂、笨重的问题。本发明的两组踝关节活塞组件中的活塞杆分别通过两个二力杆连接铰链与两个踝关节二力杆首端铰接,两个踝关节二力杆末端分别通过两个二力杆十字轴铰链与两个二力杆轴座铰接,小腿骨架底部通过踝关节十字轴铰链与踝关节轴座铰接,当两组液压缸推动两组活塞杆同步运动时,仿人足实现俯仰方向转动,当两组液压缸推动两组活塞杆异步

绳驱动仿人机器人下肢设计与仿真分析.docx
绳驱动仿人机器人下肢设计与仿真分析绳驱动仿人机器人下肢设计与仿真分析摘要:随着机器人技术的发展,仿人机器人在人类生活中的应用越来越广泛。绳驱动机器人作为一种新型驱动方式,具有结构简单、重量轻、功率密度高等优点,越来越受到研究人员的关注。本文以绳驱动仿人机器人为研究对象,重点探讨了其下肢设计与仿真分析。1.引言随着机器人技术的突飞猛进,仿人机器人在人类生活中起到了越来越重要的作用。然而,传统的机器人驱动方式如电机驱动存在着功率密度低、结构复杂、重量大等问题。绳驱动作为一种新型驱动方式,具有结构简单、重量轻、
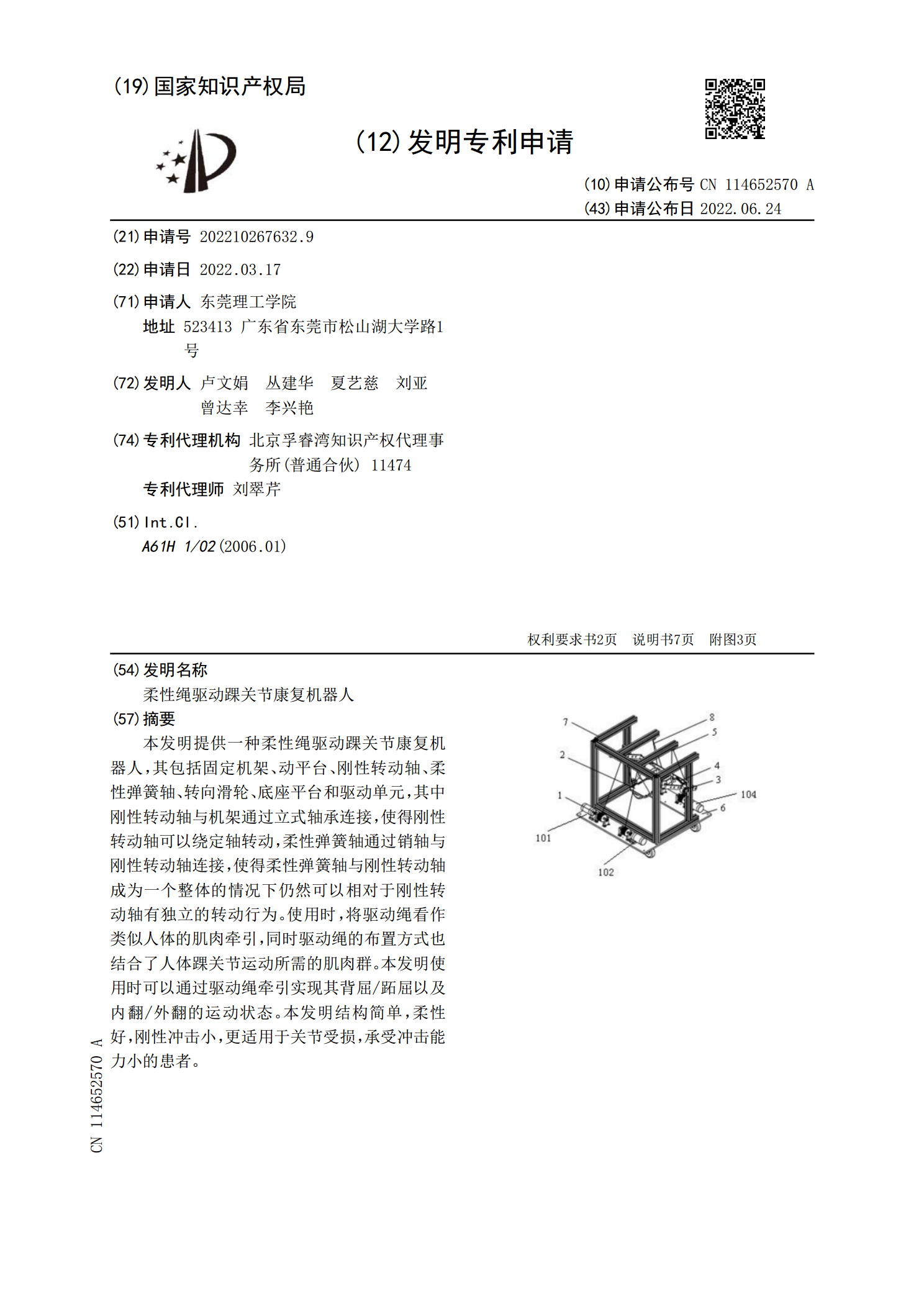
柔性绳驱动踝关节康复机器人.pdf
本发明提供一种柔性绳驱动踝关节康复机器人,其包括固定机架、动平台、刚性转动轴、柔性弹簧轴、转向滑轮、底座平台和驱动单元,其中刚性转动轴与机架通过立式轴承连接,使得刚性转动轴可以绕定轴转动,柔性弹簧轴通过销轴与刚性转动轴连接,使得柔性弹簧轴与刚性转动轴成为一个整体的情况下仍然可以相对于刚性转动轴有独立的转动行为。使用时,将驱动绳看作类似人体的肌肉牵引,同时驱动绳的布置方式也结合了人体踝关节运动所需的肌肉群。本发明使用时可以通过驱动绳牵引实现其背屈/跖屈以及内翻/外翻的运动状态。本发明结构简单,柔性好,刚性冲