
一种二自由度并联驱动仿人踝关节机构.pdf

睿德****找我

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种二自由度并联驱动仿人踝关节机构.pdf
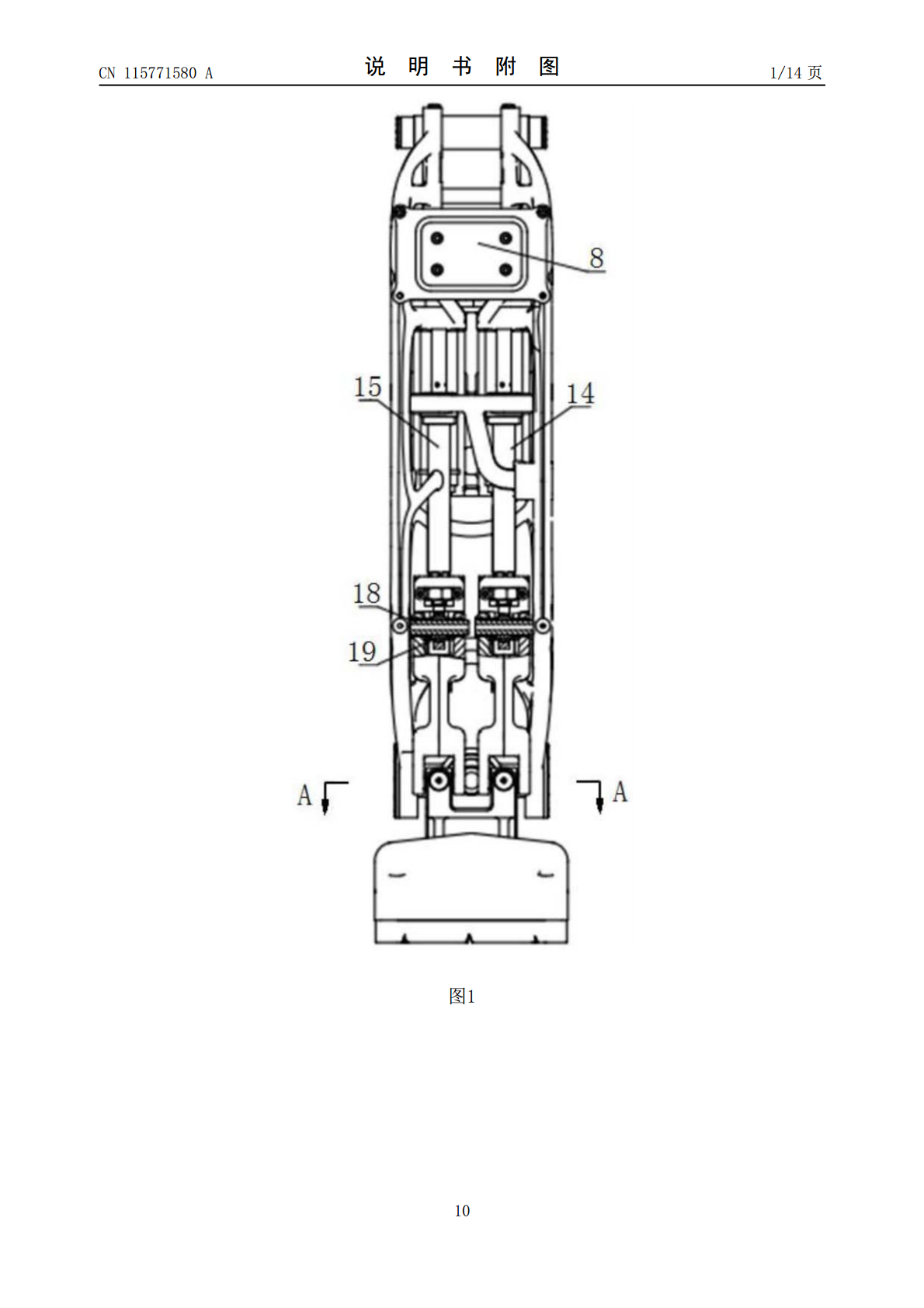
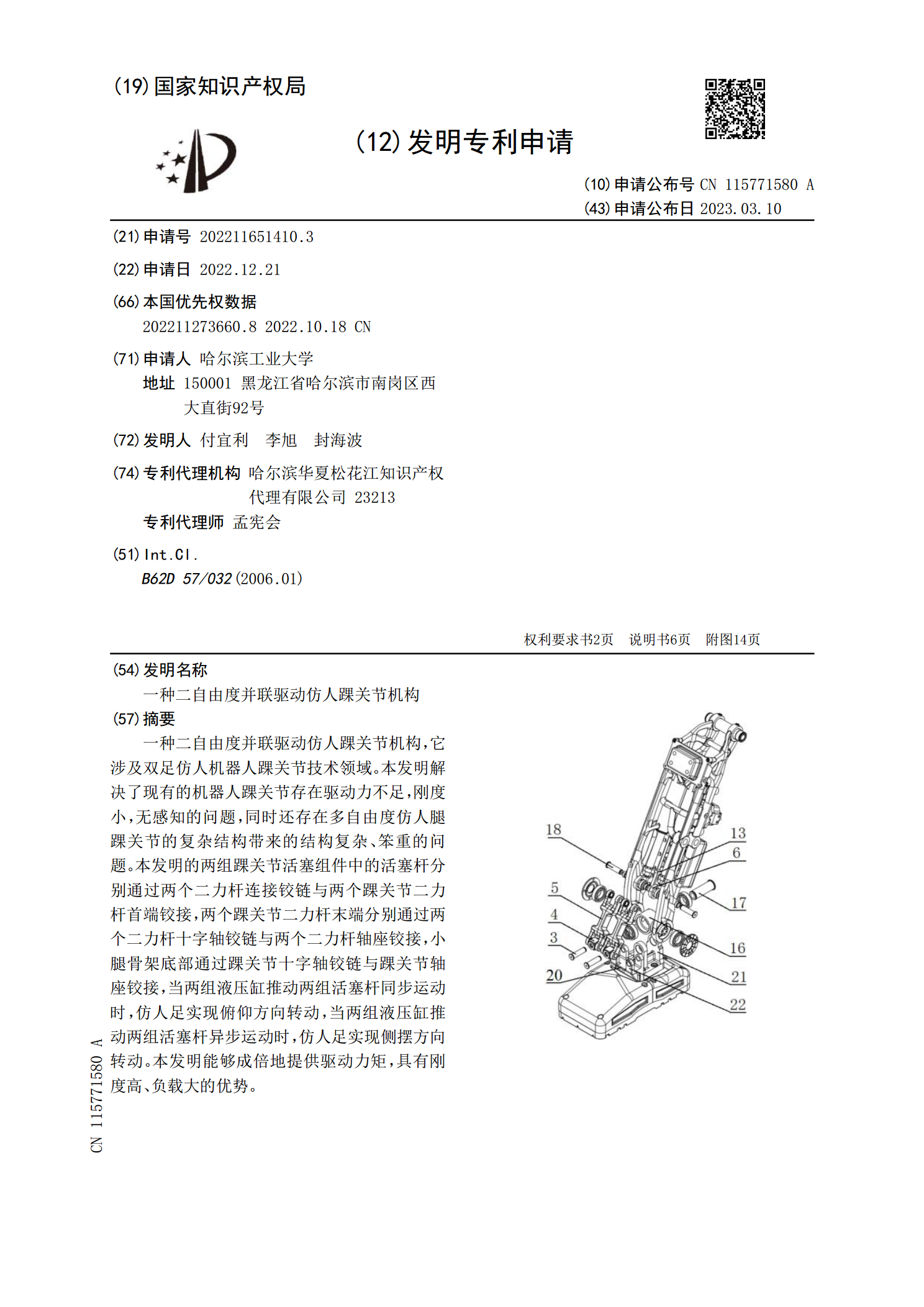
一种二自由度并联驱动仿人踝关节机构,它涉及双足仿人机器人踝关节技术领域。本发明解决了现有的机器人踝关节存在驱动力不足,刚度小,无感知的问题,同时还存在多自由度仿人腿踝关节的复杂结构带来的结构复杂、笨重的问题。本发明的两组踝关节活塞组件中的活塞杆分别通过两个二力杆连接铰链与两个踝关节二力杆首端铰接,两个踝关节二力杆末端分别通过两个二力杆十字轴铰链与两个二力杆轴座铰接,小腿骨架底部通过踝关节十字轴铰链与踝关节轴座铰接,当两组液压缸推动两组活塞杆同步运动时,仿人足实现俯仰方向转动,当两组液压缸推动两组活塞杆异步
一种基于并联机构的绳驱动七自由度仿人机械臂.pdf
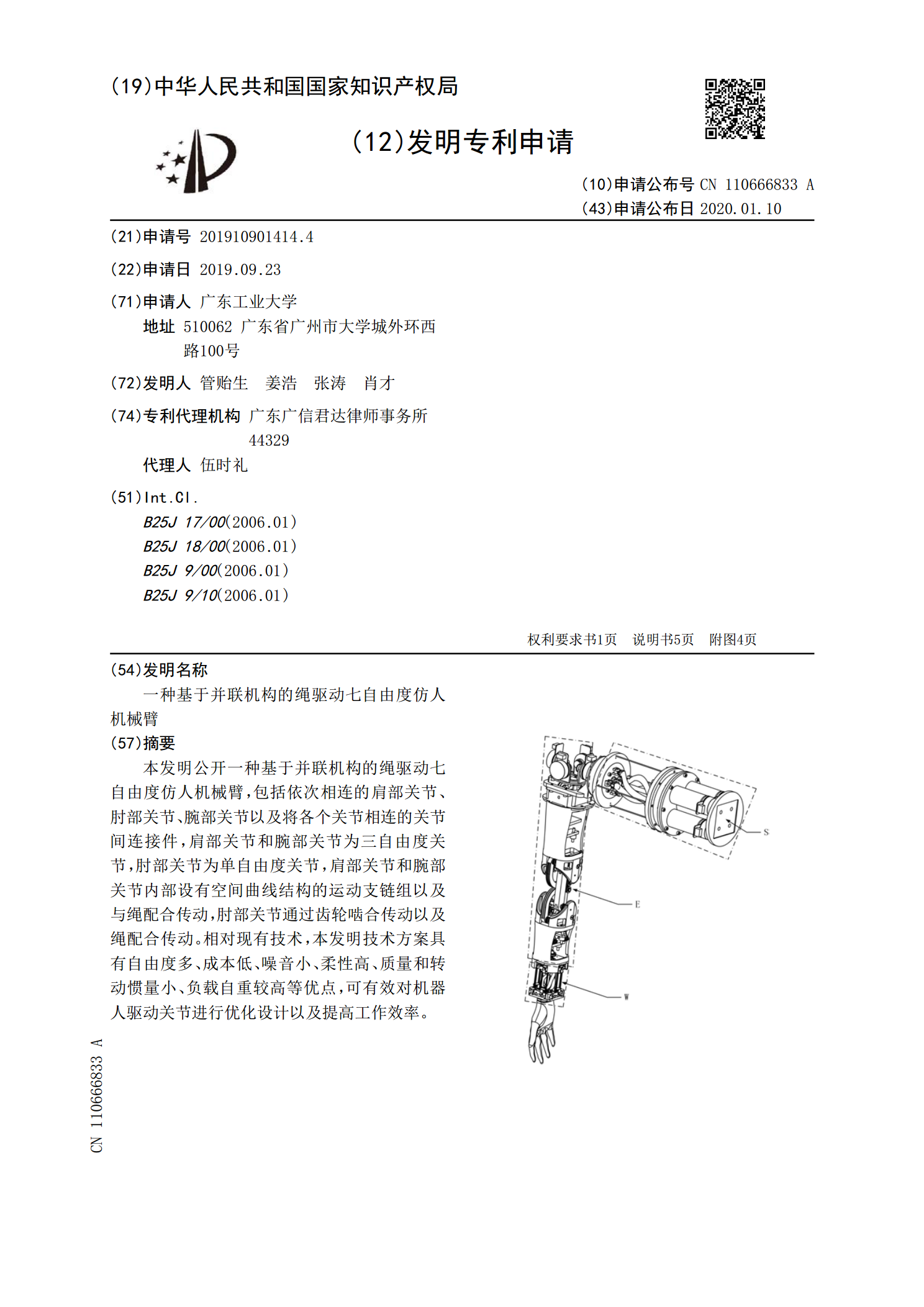
本发明公开一种基于并联机构的绳驱动七自由度仿人机械臂,包括依次相连的肩部关节、肘部关节、腕部关节以及将各个关节相连的关节间连接件,肩部关节和腕部关节为三自由度关节,肘部关节为单自由度关节,肩部关节和腕部关节内部设有空间曲线结构的运动支链组以及与绳配合传动,肘部关节通过齿轮啮合传动以及绳配合传动。相对现有技术,本发明技术方案具有自由度多、成本低、噪音小、柔性高、质量和转动惯量小、负载自重较高等优点,可有效对机器人驱动关节进行优化设计以及提高工作效率。
一种三自由度并联机构踝关节康复装置.pdf
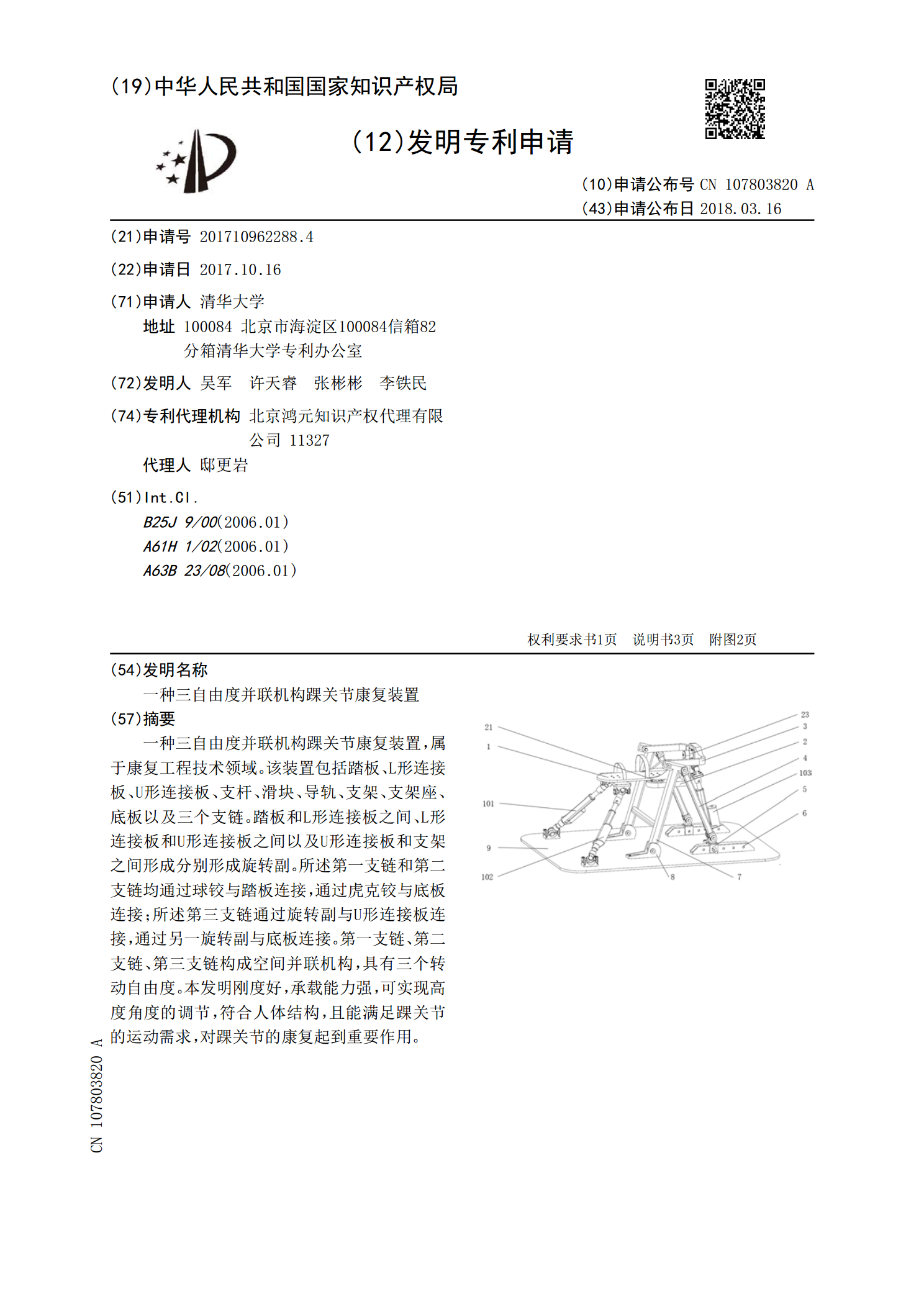
一种三自由度并联机构踝关节康复装置,属于康复工程技术领域。该装置包括踏板、L形连接板、U形连接板、支杆、滑块、导轨、支架、支架座、底板以及三个支链。踏板和L形连接板之间、L形连接板和U形连接板之间以及U形连接板和支架之间形成分别形成旋转副。所述第一支链和第二支链均通过球铰与踏板连接,通过虎克铰与底板连接;所述第三支链通过旋转副与U形连接板连接,通过另一旋转副与底板连接。第一支链、第二支链、第三支链构成空间并联机构,具有三个转动自由度。本发明刚度好,承载能力强,可实现高度角度的调节,符合人体结构,且能满足踝
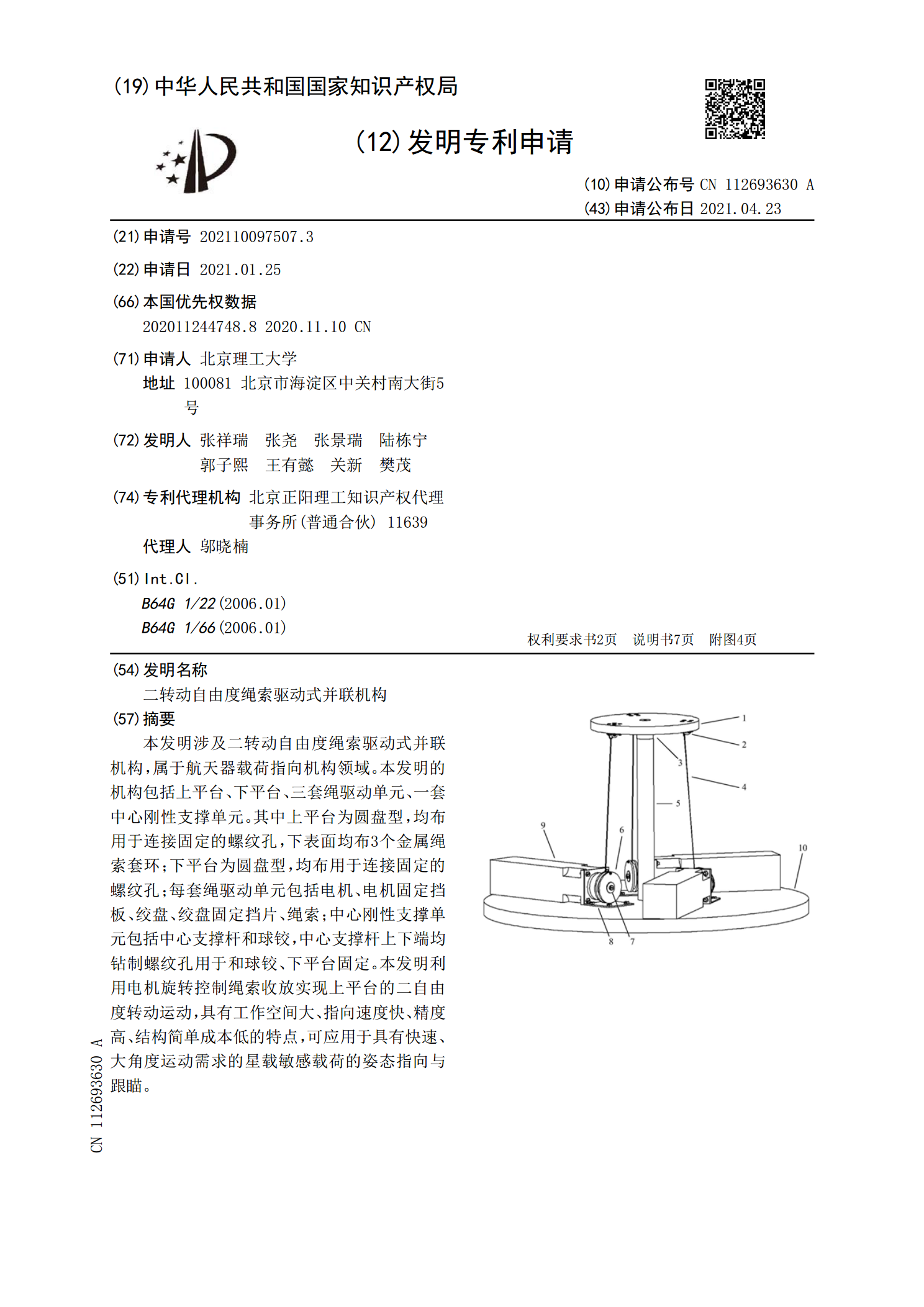
二转动自由度绳索驱动式并联机构.pdf
本发明涉及二转动自由度绳索驱动式并联机构,属于航天器载荷指向机构领域。本发明的机构包括上平台、下平台、三套绳驱动单元、一套中心刚性支撑单元。其中上平台为圆盘型,均布用于连接固定的螺纹孔,下表面均布3个金属绳索套环;下平台为圆盘型,均布用于连接固定的螺纹孔;每套绳驱动单元包括电机、电机固定挡板、绞盘、绞盘固定挡片、绳索;中心刚性支撑单元包括中心支撑杆和球铰,中心支撑杆上下端均钻制螺纹孔用于和球铰、下平台固定。本发明利用电机旋转控制绳索收放实现上平台的二自由度转动运动,具有工作空间大、指向速度快、精度高、结构
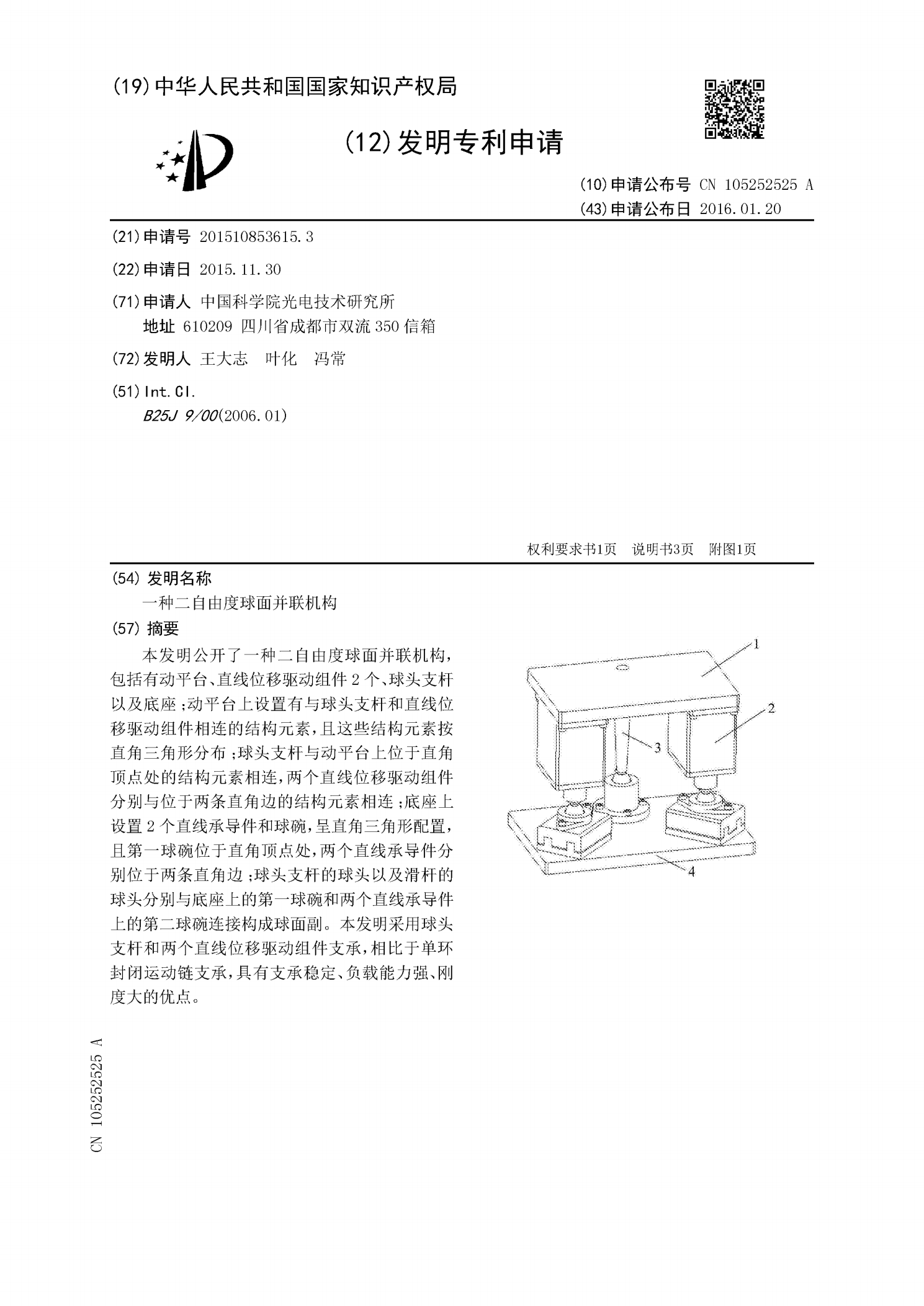
一种二自由度球面并联机构.pdf
本发明公开了一种二自由度球面并联机构,包括有动平台、直线位移驱动组件2个、球头支杆以及底座;动平台上设置有与球头支杆和直线位移驱动组件相连的结构元素,且这些结构元素按直角三角形分布;球头支杆与动平台上位于直角顶点处的结构元素相连,两个直线位移驱动组件分别与位于两条直角边的结构元素相连;底座上设置2个直线承导件和球碗,呈直角三角形配置,且第一球碗位于直角顶点处,两个直线承导件分别位于两条直角边;球头支杆的球头以及滑杆的球头分别与底座上的第一球碗和两个直线承导件上的第二球碗连接构成球面副。本发明采用球头支杆和