
绳驱动仿人机器人下肢设计与仿真分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

绳驱动仿人机器人下肢设计与仿真分析.docx
绳驱动仿人机器人下肢设计与仿真分析绳驱动仿人机器人下肢设计与仿真分析摘要:随着机器人技术的发展,仿人机器人在人类生活中的应用越来越广泛。绳驱动机器人作为一种新型驱动方式,具有结构简单、重量轻、功率密度高等优点,越来越受到研究人员的关注。本文以绳驱动仿人机器人为研究对象,重点探讨了其下肢设计与仿真分析。1.引言随着机器人技术的突飞猛进,仿人机器人在人类生活中起到了越来越重要的作用。然而,传统的机器人驱动方式如电机驱动存在着功率密度低、结构复杂、重量大等问题。绳驱动作为一种新型驱动方式,具有结构简单、重量轻、

下肢康复机器人的设计与仿真分析.docx
下肢康复机器人的设计与仿真分析摘要:下肢康复机器人是一种用于帮助肢体失能患者进行康复训练的机器人设备。本文旨在介绍下肢康复机器人的设计和仿真分析,包括机器人的结构设计、控制系统设计和仿真分析。经过对机器人运动学和动力学特性的分析和仿真,我们得出了机器人在康复训练中的优点和应用前景。关键词:下肢康复,机器人,运动学,动力学,控制系统,仿真分析。一、绪论随着人口老龄化程度的加剧,越来越多的人因健康问题而产生了下肢疾病,影响了他们日常生活的质量。在这种情况下,康复治疗成为恢复肢体功能和活动的最有效方法之一。而下

下肢外骨骼康复机器人的设计及仿真分析.docx
下肢外骨骼康复机器人的设计及仿真分析标题:下肢外骨骼康复机器人的设计及仿真分析摘要:随着人口老龄化程度的不断加深,下肢功能障碍相关的康复需求日益增加。下肢外骨骼康复机器人的设计及仿真分析成为一个备受关注的领域。本文以满足下肢功能障碍患者康复需求为目标,利用工程设计原理和仿真分析技术,通过互联网检索相关的研究资料、文献和专利,并结合现有的技术水平,对下肢外骨骼康复机器人的设计及仿真分析进行了详细的探讨。首先,介绍了下肢功能障碍的特点和康复需求;然后,阐述了下肢外骨骼康复机器人的设计理念和工作原理;接着,详细
用于下肢康复机器人的基于绳驱动的内足机构.pdf
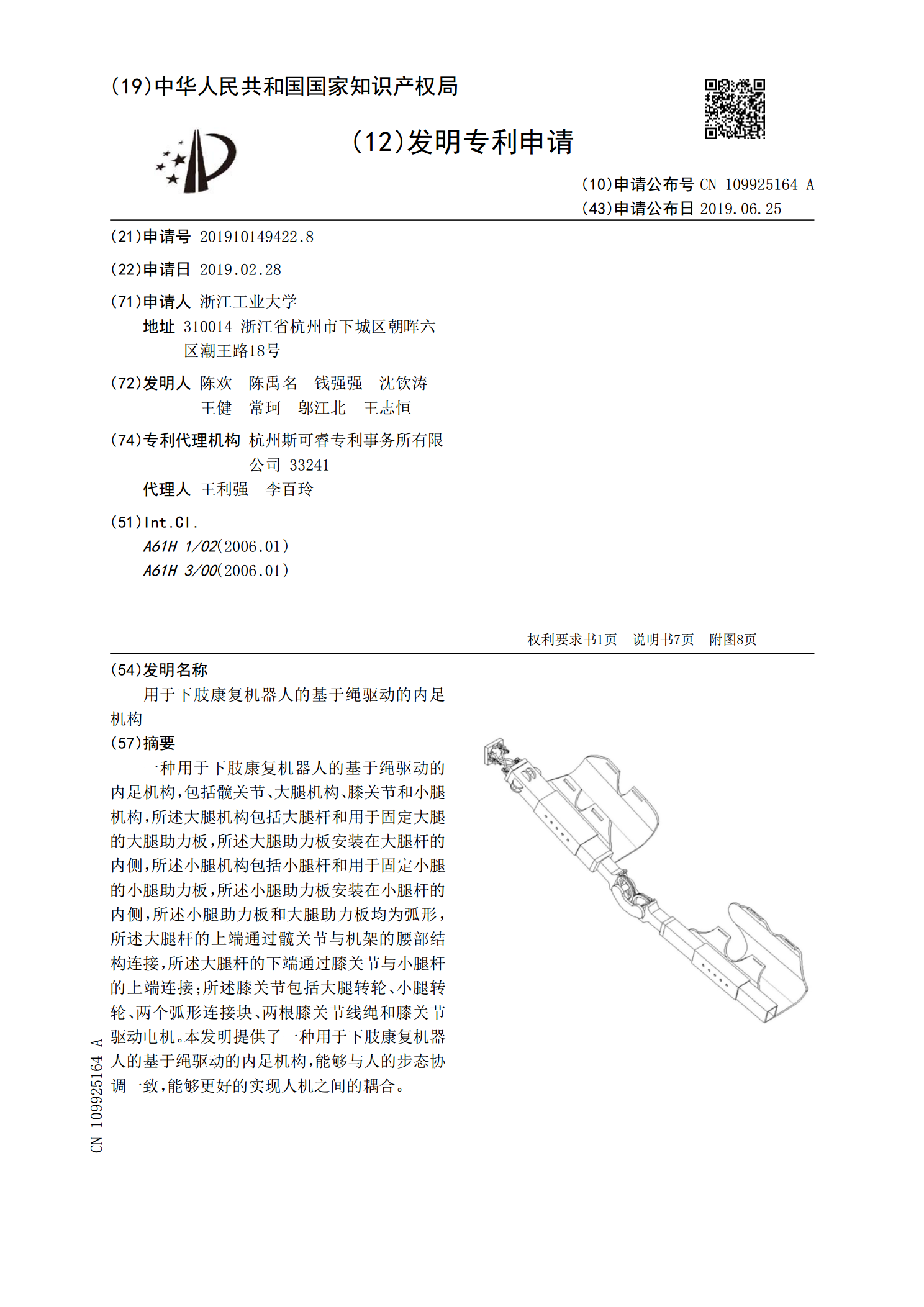
一种用于下肢康复机器人的基于绳驱动的内足机构,包括髋关节、大腿机构、膝关节和小腿机构,所述大腿机构包括大腿杆和用于固定大腿的大腿助力板,所述大腿助力板安装在大腿杆的内侧,所述小腿机构包括小腿杆和用于固定小腿的小腿助力板,所述小腿助力板安装在小腿杆的内侧,所述小腿助力板和大腿助力板均为弧形,所述大腿杆的上端通过髋关节与机架的腰部结构连接,所述大腿杆的下端通过膝关节与小腿杆的上端连接;所述膝关节包括大腿转轮、小腿转轮、两个弧形连接块、两根膝关节线绳和膝关节驱动电机。本发明提供了一种用于下肢康复机器人的基于绳驱

绳索驱动的仿人机器人下肢设计与研究的任务书.docx
绳索驱动的仿人机器人下肢设计与研究的任务书任务书任务名称:绳索驱动的仿人机器人下肢设计与研究任务目标:本任务旨在通过绳索驱动的设计与研究,实现仿人机器人下肢的稳定行走和运动控制,并对其进行实验验证,以达到优化设计和提高性能的目的。任务内容:1.绳索驱动的仿人机器人下肢设计与研究对于下肢机械结构的设计,需要考虑人类下肢运动特点与生理机制,结合仿生学原理,设计出适合的绳索驱动结构与下肢关节控制系统,确保机器人下肢具有灵活性和稳定性。2.软硬件系统的开发根据设计要求和功能需求,进行软硬件系统的开发,包括控制芯片