
一种履带式移动机器人的自主行驶路径跟踪控制方法.pdf

听容****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种履带式移动机器人的自主行驶路径跟踪控制方法.pdf
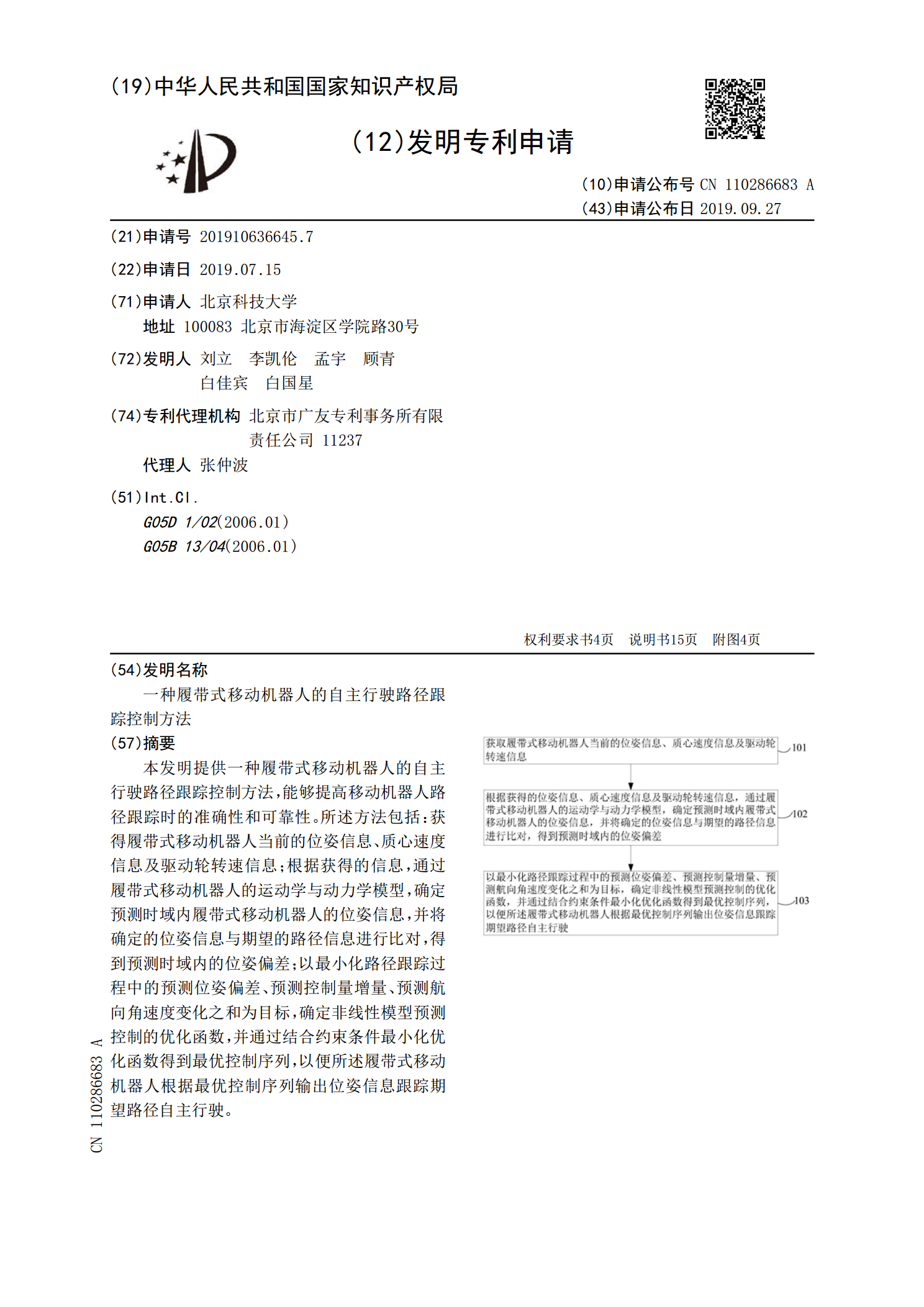
本发明提供一种履带式移动机器人的自主行驶路径跟踪控制方法,能够提高移动机器人路径跟踪时的准确性和可靠性。所述方法包括:获得履带式移动机器人当前的位姿信息、质心速度信息及驱动轮转速信息;根据获得的信息,通过履带式移动机器人的运动学与动力学模型,确定预测时域内履带式移动机器人的位姿信息,并将确定的位姿信息与期望的路径信息进行比对,得到预测时域内的位姿偏差;以最小化路径跟踪过程中的预测位姿偏差、预测控制量增量、预测航向角速度变化之和为目标,确定非线性模型预测控制的优化函数,并通过结合约束条件最小化优化函数得到最

一种自主行驶轨迹跟踪控制方法.pdf
本发明涉及一种自主行驶轨迹跟踪控制方法,包括:确定车辆横摆角和目标轨迹切向角,定义横摆角误差和滑模切换函数;对滑模切换函数求导,并把化简后的车辆动力学模型带入滑模切换导函数中;设计控制律,也就是控制器的输出;利用RBF神经网络对控制器非线性函数进行在线学习;最后得到控制器输出,即为车辆前轮转角,通过控制车辆前轮转角进而实现车辆路径跟踪控制。本发明设计的路径跟踪控制器能够实现对目标轨迹和期望横摆角速度的稳态跟踪,且跟踪精度良好。
自主行驶控制设备、自主行驶控制系统和自主行驶控制方法.pdf
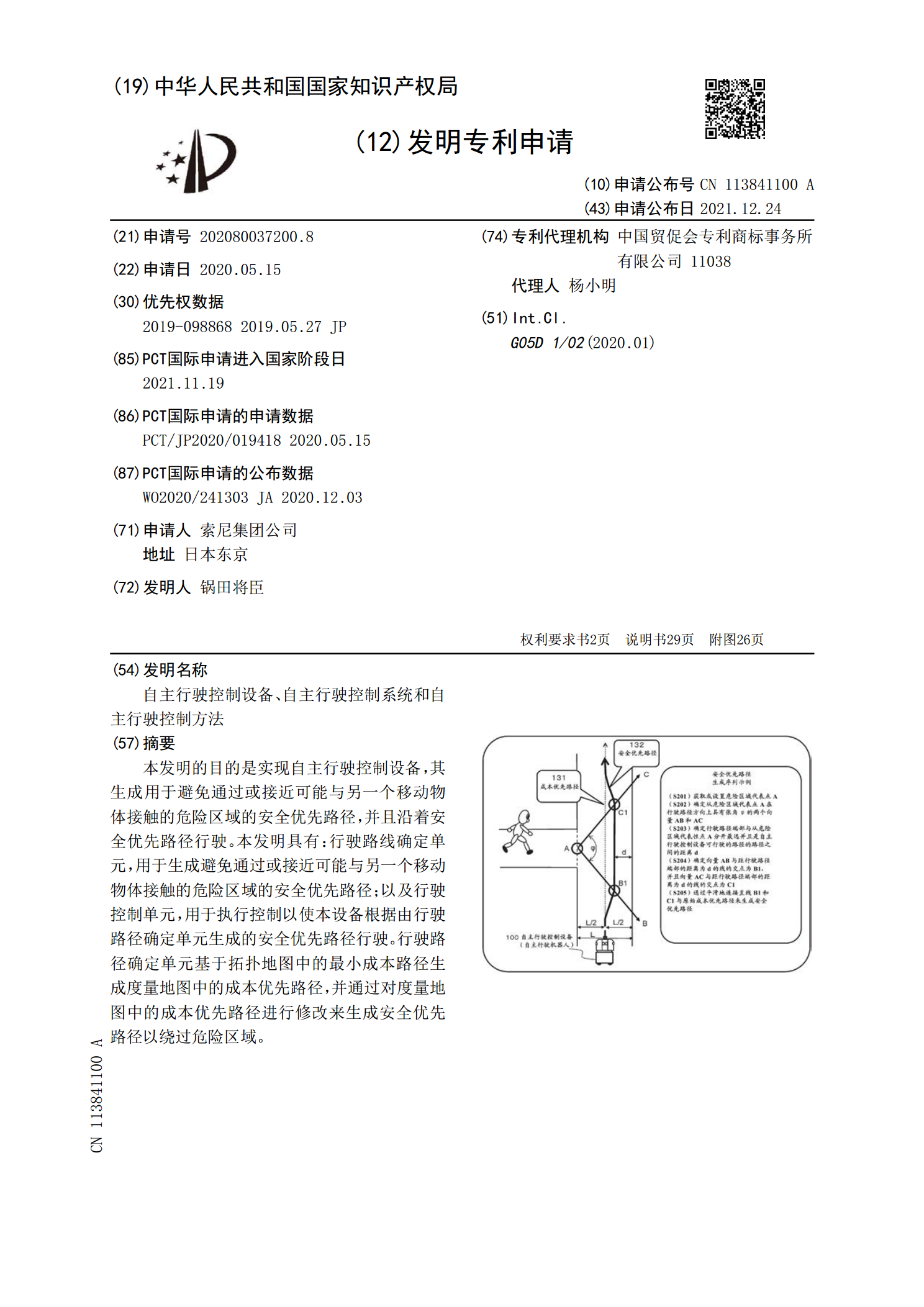
本发明的目的是实现自主行驶控制设备,其生成用于避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径,并且沿着安全优先路径行驶。本发明具有:行驶路线确定单元,用于生成避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径;以及行驶控制单元,用于执行控制以使本设备根据由行驶路径确定单元生成的安全优先路径行驶。行驶路径确定单元基于拓扑地图中的最小成本路径生成度量地图中的成本优先路径,并通过对度量地图中的成本优先路径进行修改来生成安全优先路径以绕过危险区域。

一种与行驶速度无关的农机路径跟踪方法.docx
一种与行驶速度无关的农机路径跟踪方法随着农业技术的不断发展,越来越多的农业机械被广泛应用于种植、施肥、灌溉、收割等农业作业中。然而,农机在行驶过程中,往往需要遵循一定的路径进行行进,以保证作业效率,减少物料浪费,避免对农作物和耕地的伤害。因此,为了提高农机的自主行驶能力,需要研究一种有效的路径跟踪方法。传统的路径跟踪方法通常基于机器视觉、全局定位和激光雷达等技术,其中机器视觉和激光雷达能够获取场景中的静态信息,全局定位则可以获取农机的实时位置。这些方法可以有效地追踪农机的运动轨迹,但是会受到光照、天气等因

移动机器人路径跟踪控制方法研究.docx
移动机器人路径跟踪控制方法研究移动机器人路径跟踪控制方法研究随着研究和发展,移动机器人的应用越来越广泛,如室内清洁机器人、无人驾驶汽车、无人机等等。而移动机器人的路径跟踪控制是机器人控制的重要部分,它是指移动机器人在规划好的路径上运动时,根据所测得的外部信息进行控制,以使车辆沿规划的路径行驶,从而实现机器人的导航功能。基于这个问题,本文将从三个方面论述移动机器人路径跟踪控制方法:路径规划、传感技术和控制方法。一、路径规划路径规划是指在不同的环境下生成机器人的运动路径,以达到目的地的方法。路径规划技术有多种